
一种管道漏点检测装置及其检测方法.pdf

子安****吖吖


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种管道漏点检测装置及其检测方法.pdf
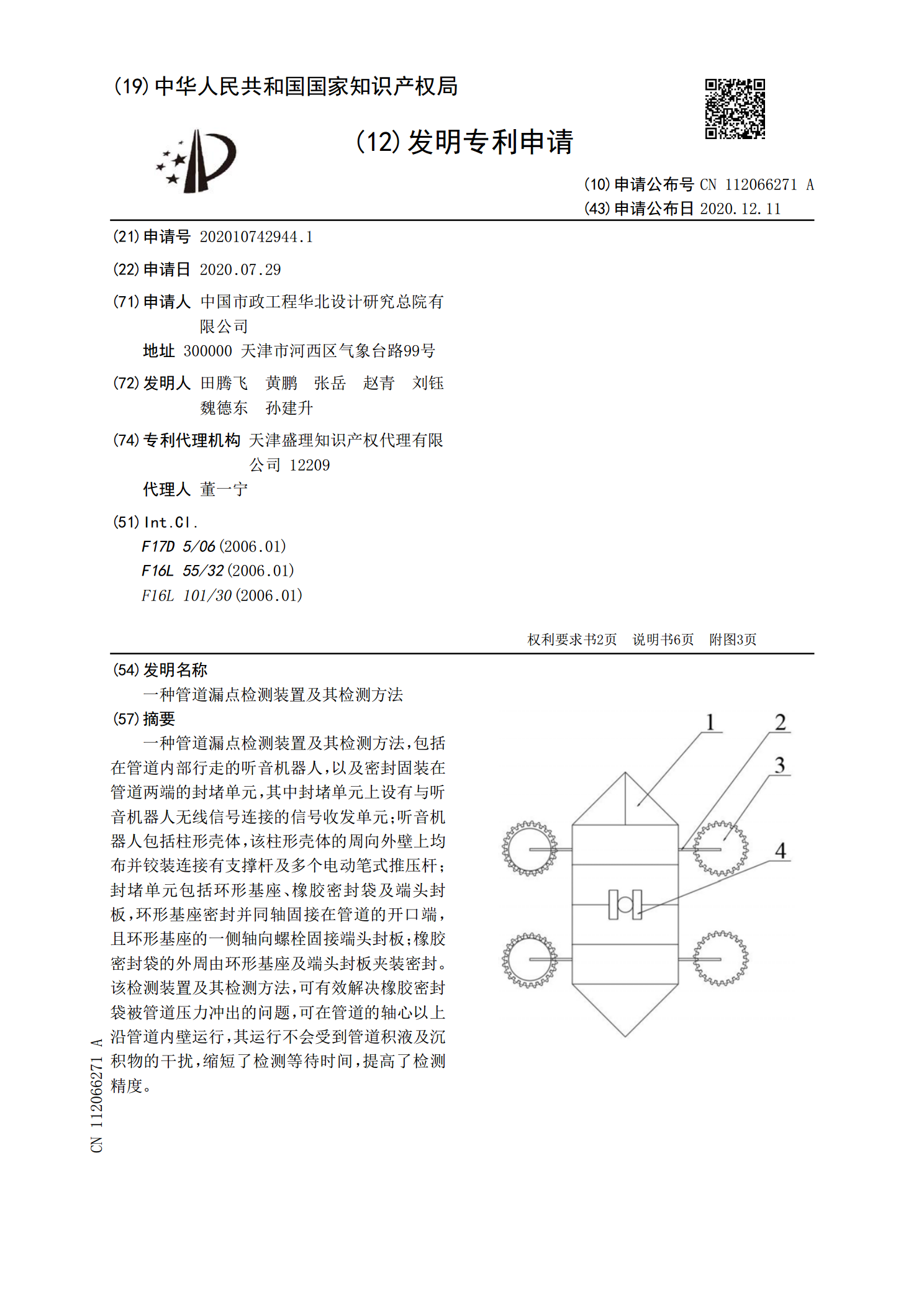
一种管道漏点检测装置及其检测方法,包括在管道内部行走的听音机器人,以及密封固装在管道两端的封堵单元,其中封堵单元上设有与听音机器人无线信号连接的信号收发单元;听音机器人包括柱形壳体,该柱形壳体的周向外壁上均布并铰装连接有支撑杆及多个电动笔式推压杆;封堵单元包括环形基座、橡胶密封袋及端头封板,环形基座密封并同轴固接在管道的开口端,且环形基座的一侧轴向螺栓固接端头封板;橡胶密封袋的外周由环形基座及端头封板夹装密封。该检测装置及其检测方法,可有效解决橡胶密封袋被管道压力冲出的问题,可在管道的轴心以上沿管道内壁运

一种手持式管道焊缝漏磁检测装置及其检测方法.pdf
本发明涉及的是一种手持式管道焊缝漏磁检测装置及其检测方法,其中手持式管道焊缝漏磁检测装置的机架设置有行进轮,其中一个行进轮为定距轮,该定距轮一侧固定有主动轮,主动轮与从动轮啮合,主动轮与从动轮的传动比1:1,从动轮侧面同轴设置编码器;磁化机构的两个永磁体并排设置于衔铁下,每个永磁体通过其下面的极靴保护,磁化方向垂直于行进方向;数据采集机构的传感器盒固定到衔铁下方且位于两永磁体磁极之间,传感器盒与衔铁之间设置有弹簧;霍尔传感器平行于极靴底面排列于传感器盒内部,霍尔传感器阵列方向与磁化方向平行、与行进方向垂直

一种管道漏磁检测装置.pdf
本发明提出了一种管道漏磁检测装置,其特征在于:包括磁性探头、里程轮、动力轮、皮套和连接件,所述磁性探头的前端设有动力轮,所述磁性探头的后端设有里程轮,所述磁性探头和动力轮之间通过连接件连接,所述磁性探头和里程轮之间通过连接件连接,所述磁性探头、里程轮和动力轮的前后两端设有皮套。与现有技术相比,本发明提供的一种管道漏磁检测装置,结构合理,通过将该装置放入管道中,动力轮带动磁性探头和里程轮沿管道移动,磁性探头对管道进行漏磁检测,里程轮可以记录装置的运行里程,操作人员只需在检测完成后,根据里程轮记录的数据从而确
一种管道内漏磁检测装置.pdf
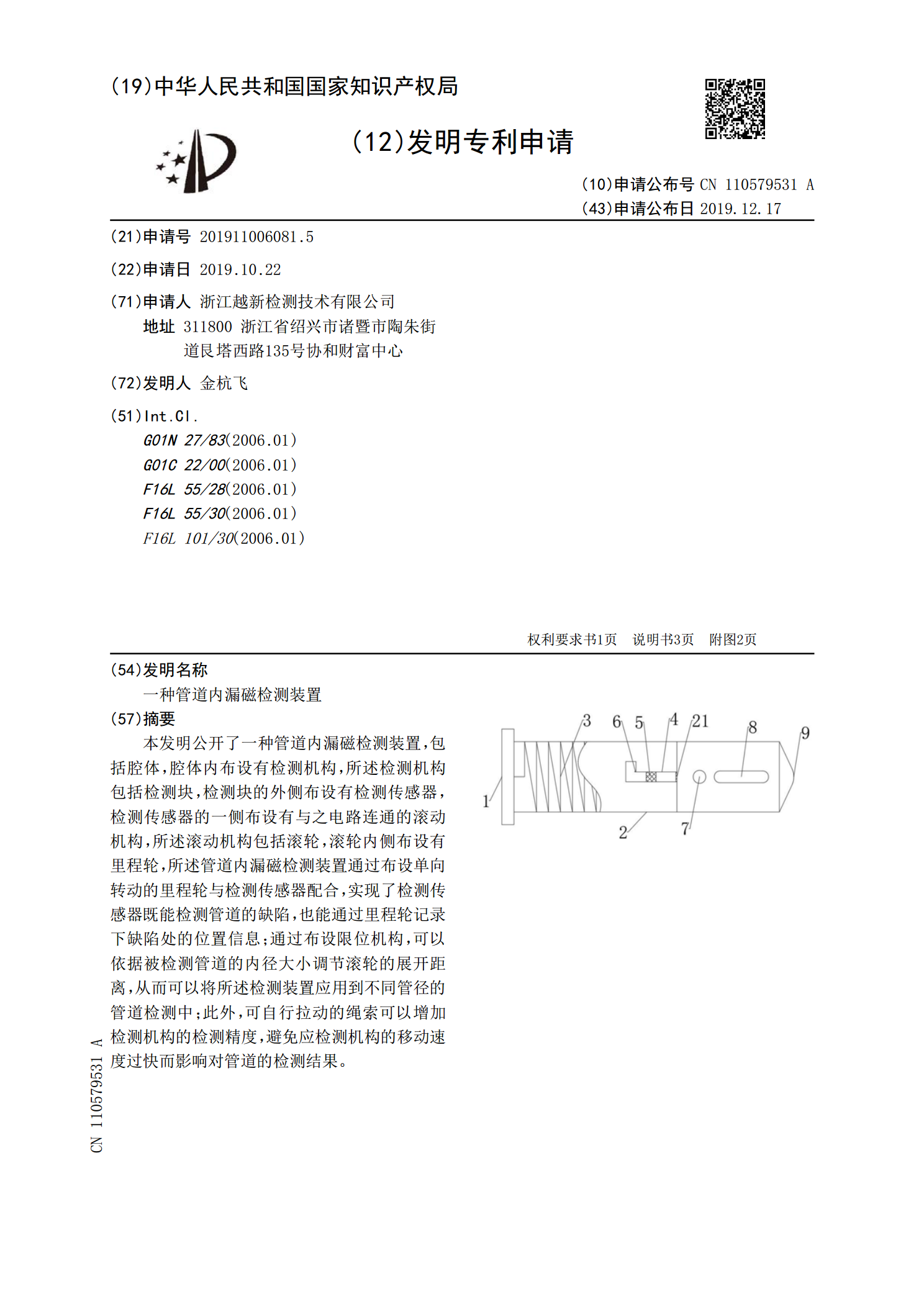
本发明公开了一种管道内漏磁检测装置,包括腔体,腔体内布设有检测机构,所述检测机构包括检测块,检测块的外侧布设有检测传感器,检测传感器的一侧布设有与之电路连通的滚动机构,所述滚动机构包括滚轮,滚轮内侧布设有里程轮,所述管道内漏磁检测装置通过布设单向转动的里程轮与检测传感器配合,实现了检测传感器既能检测管道的缺陷,也能通过里程轮记录下缺陷处的位置信息;通过布设限位机构,可以依据被检测管道的内径大小调节滚轮的展开距离,从而可以将所述检测装置应用到不同管径的管道检测中;此外,可自行拉动的绳索可以增加检测机构的检测

一种管道漏点修补装置.pdf
本发明提出一种管道漏点修补装置,涉及管道修理工具,该管道漏点修补装置包括支撑柱,其一端为连接端,其另一端为操作端;密封垫,呈环状并套设在支撑柱外,密封垫的内缘能与连接端的外壁密封配合;多个支撑杆,沿支撑柱的周向均布,各支撑杆的一端铰接于支撑柱的外壁上,各支撑杆的另一端与密封垫固定连接;折叠机构,设置在支撑柱和多个支撑杆之间,多个支撑杆在折叠机构的带动下沿支撑柱的径向展开和收回;定位机构,安装于连接端,定位机构能沿支撑柱的轴线伸出和缩回。本发明提出一种管道漏点修补装置能够对压力管道漏点进行快速修补。