
一种圆棒生产用机械手臂转运装置.pdf

一吃****永贺


1/9

2/9

3/9
4/9

5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种圆棒生产用机械手臂转运装置.pdf
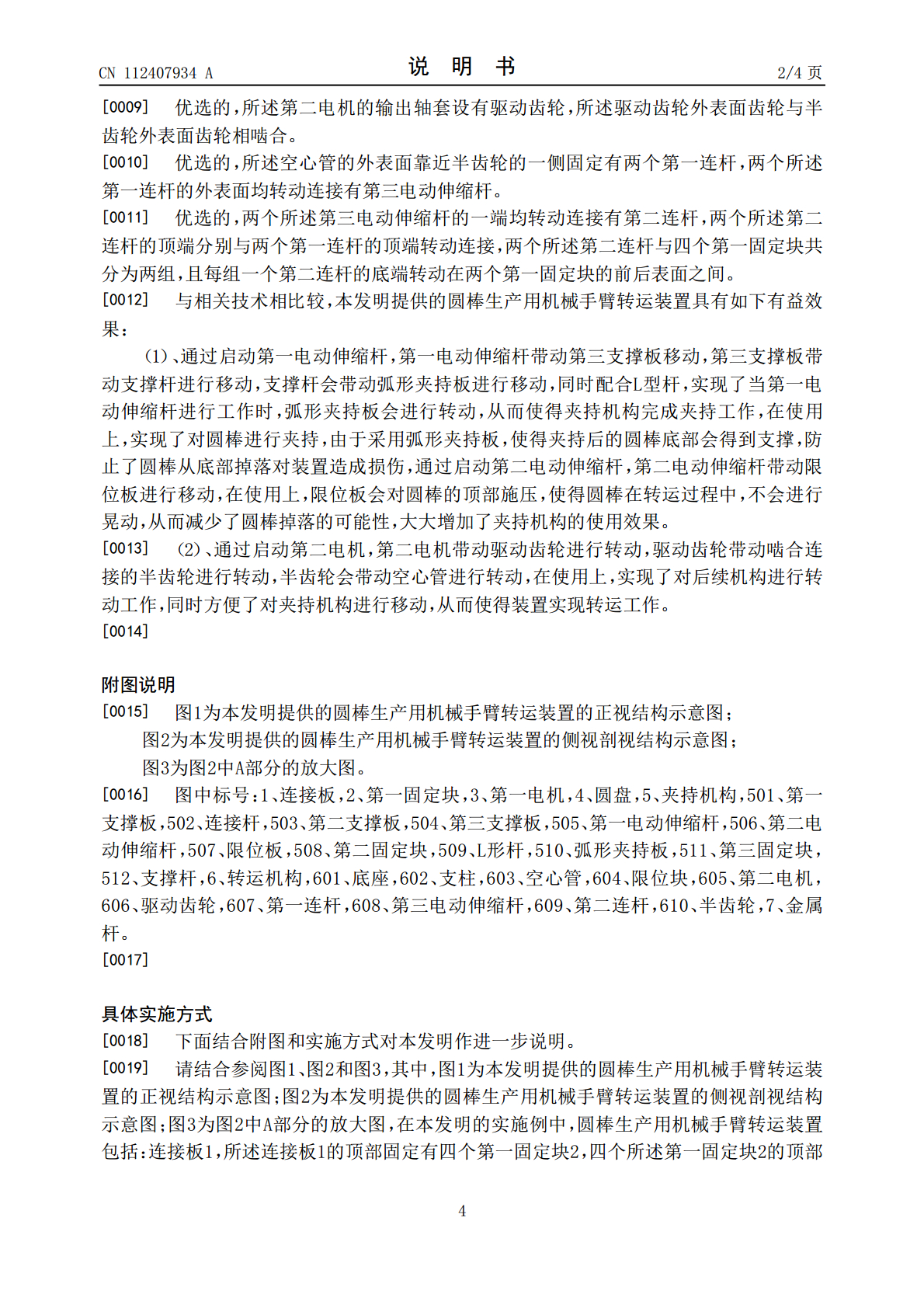
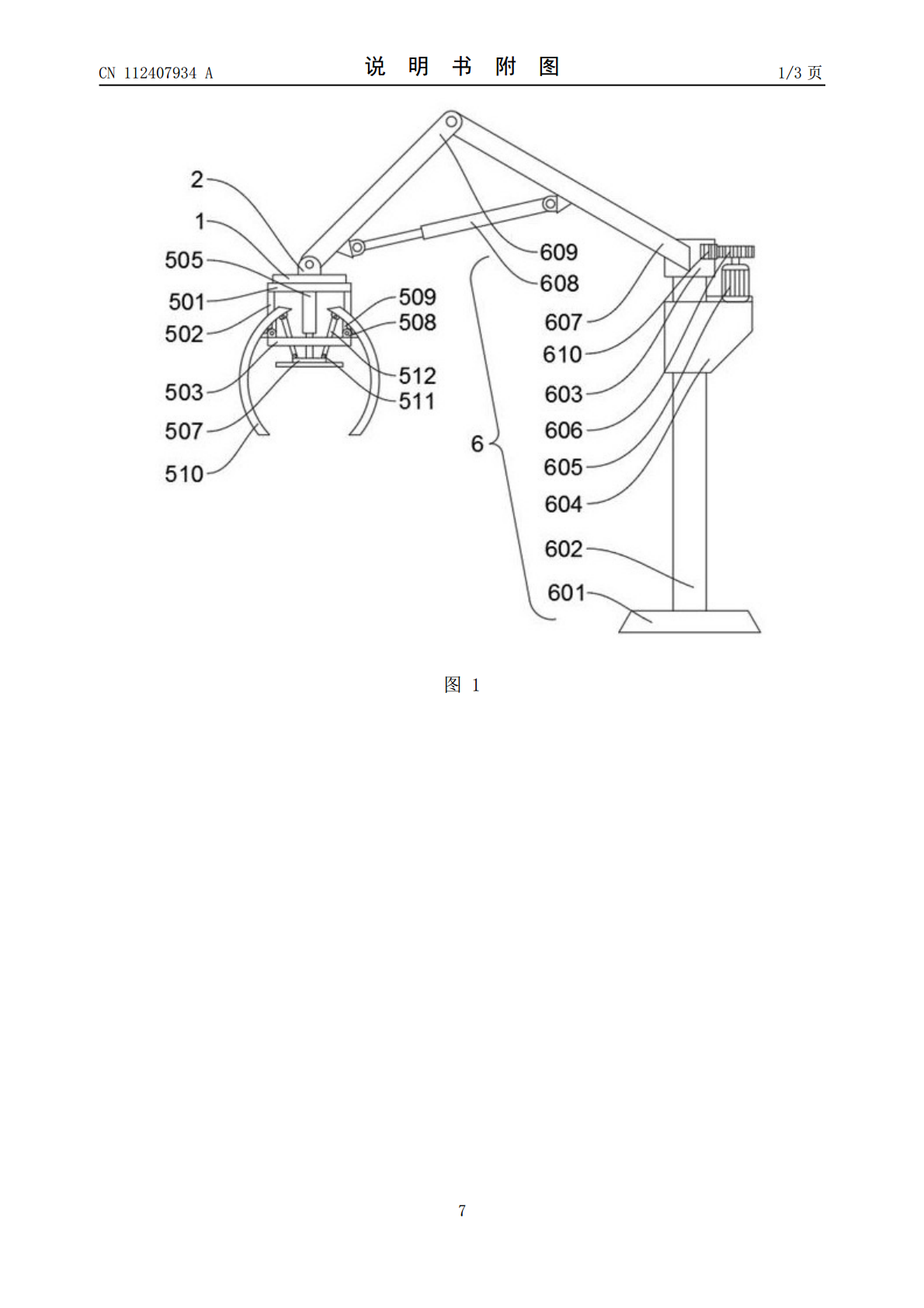
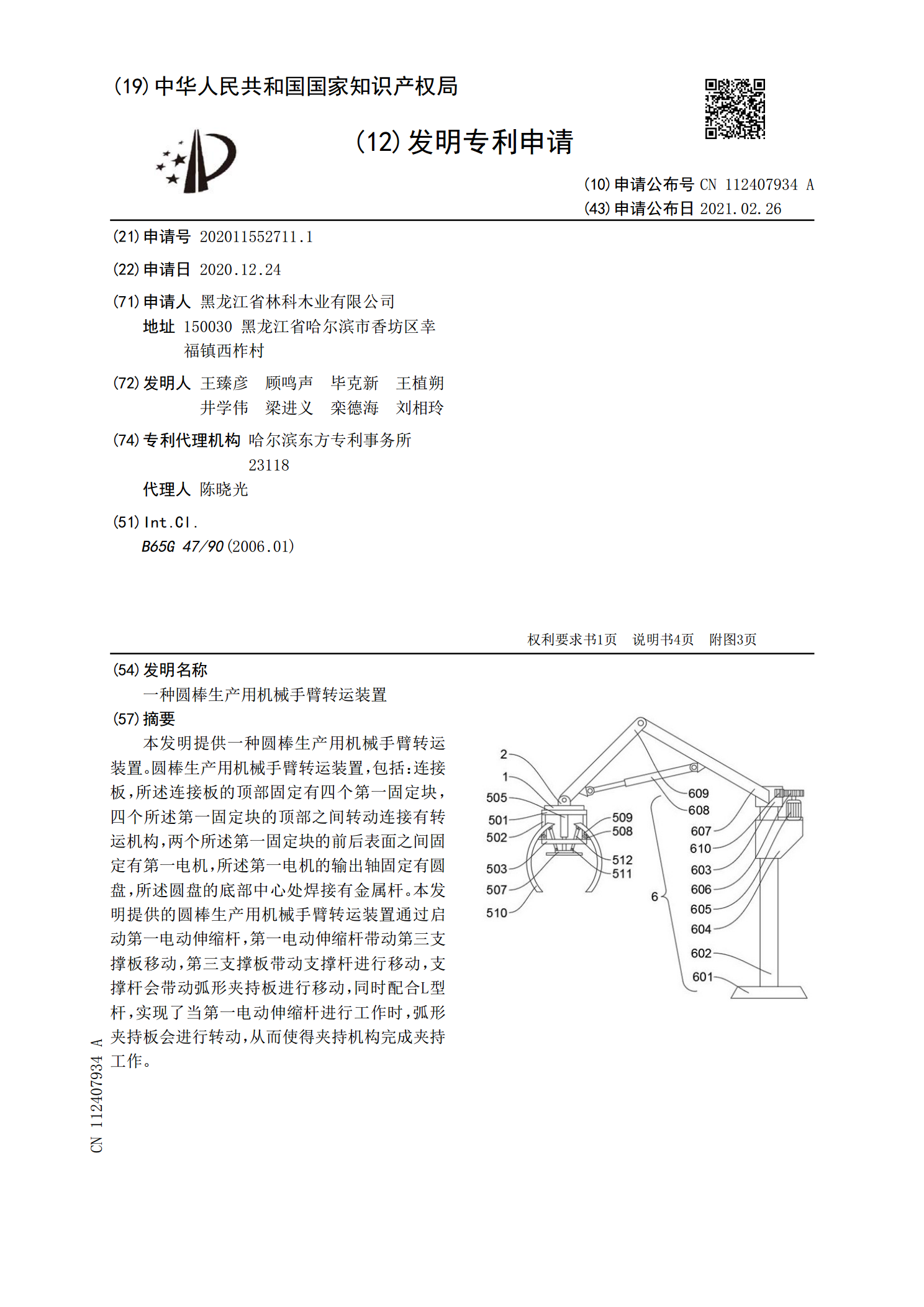
本发明提供一种圆棒生产用机械手臂转运装置。圆棒生产用机械手臂转运装置,包括:连接板,所述连接板的顶部固定有四个第一固定块,四个所述第一固定块的顶部之间转动连接有转运机构,两个所述第一固定块的前后表面之间固定有第一电机,所述第一电机的输出轴固定有圆盘,所述圆盘的底部中心处焊接有金属杆。本发明提供的圆棒生产用机械手臂转运装置通过启动第一电动伸缩杆,第一电动伸缩杆带动第三支撑板移动,第三支撑板带动支撑杆进行移动,支撑杆会带动弧形夹持板进行移动,同时配合L型杆,实现了当第一电动伸缩杆进行工作时,弧形夹持板会进行转
一种用于圆把手的自动转运机械手臂.pdf
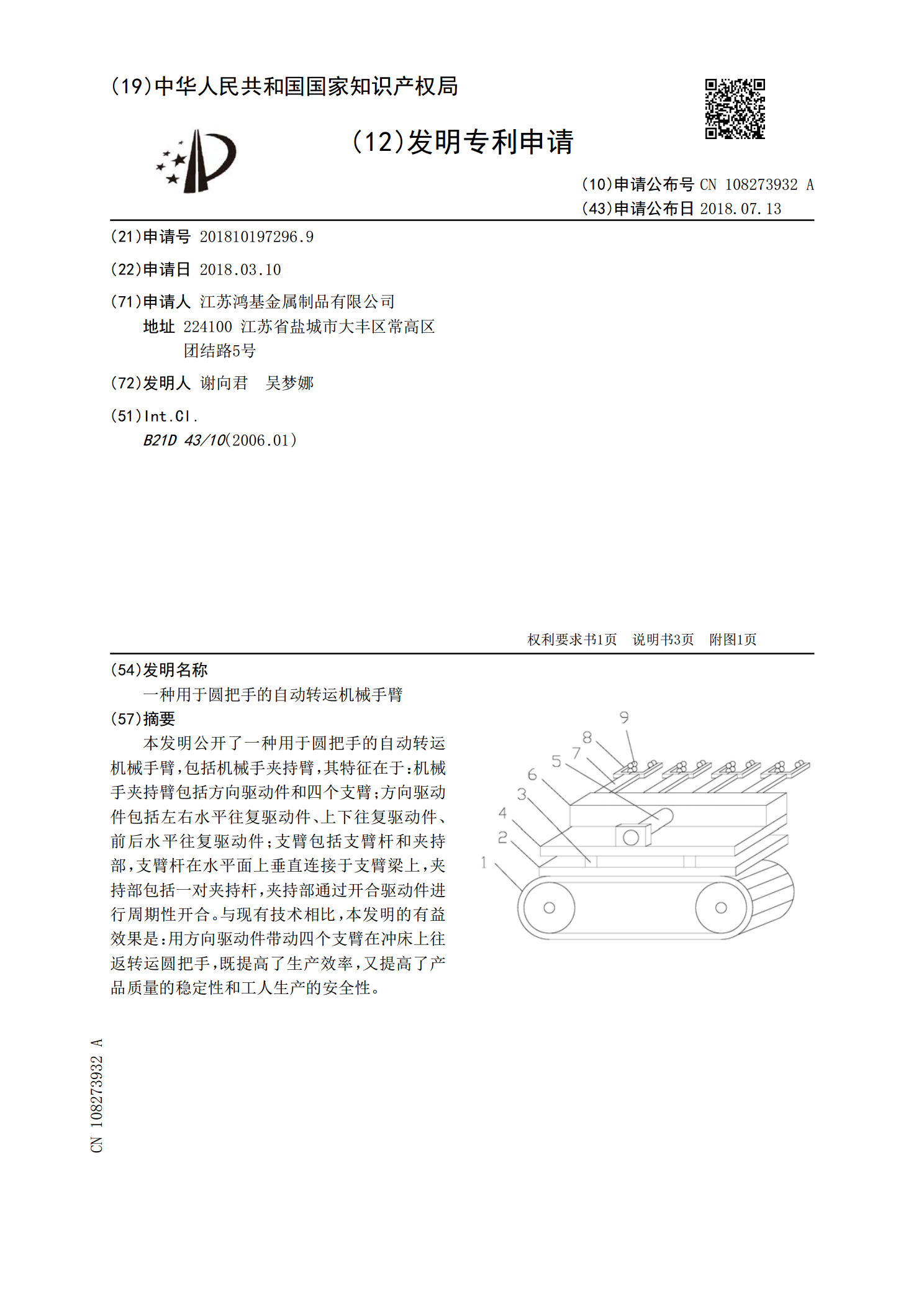
本发明公开了一种用于圆把手的自动转运机械手臂,包括机械手夹持臂,其特征在于:机械手夹持臂包括方向驱动件和四个支臂;方向驱动件包括左右水平往复驱动件、上下往复驱动件、前后水平往复驱动件;支臂包括支臂杆和夹持部,支臂杆在水平面上垂直连接于支臂梁上,夹持部包括一对夹持杆,夹持部通过开合驱动件进行周期性开合。与现有技术相比,本发明的有益效果是:用方向驱动件带动四个支臂在冲床上往返转运圆把手,既提高了生产效率,又提高了产品质量的稳定性和工人生产的安全性。

一种机械电机生产用转运装置.pdf
本发明公开了一种机械电机生产用转运装置,包括底座,所述底座的上端侧壁通过第二转动件连接有矩形块,且矩形块远离底座的侧壁连接有竖直设置的第一伸缩杆,所述第一伸缩杆远离矩形块的一端固定连接有矩形柱,且矩形柱的一侧侧壁固定连接有横向设置的支撑杆,所述支撑杆的上端侧壁固定连接有电机,所述电机上设有与其输出轴匹配的驱动轴,且驱动轴的侧壁套设有辊轮,所述辊轮的侧壁绕设有绳索,所述矩形柱远离第一伸缩杆的一端固定连接有横向设置的支杆,且支杆远离电机设置。本发明通过吊钩的前后距离可调整设计,提高了转运装置的使用范围,不需要
一种工业滚刷用棒材转运装置.pdf
本发明公开了一种工业滚刷用棒材转运装置,包括固定底板,所述固定底板的上方设置有转运箱体,所述转运箱体的内部固定安装有两个分隔板,两个所述分隔板将转运箱体的内部分隔为三个区域,且每个区域的内部均设置有缓冲组件,所述转运箱体的顶部右侧通过转轴转动连接有多功能板,所述多功能板的下表面固定连接有限位板,所述多功能板远离转轴的一侧固定连接有第二固定块。本发明,通过设置的万向轮与固定把手将整个转运装置移动到目的地,然后打开多功能板,将转运箱体内部的棒材放到多功能板上使其自然滚下到地面上,整个转运装置结构设计比较合理,
一种圆棒生产用计数装置.pdf
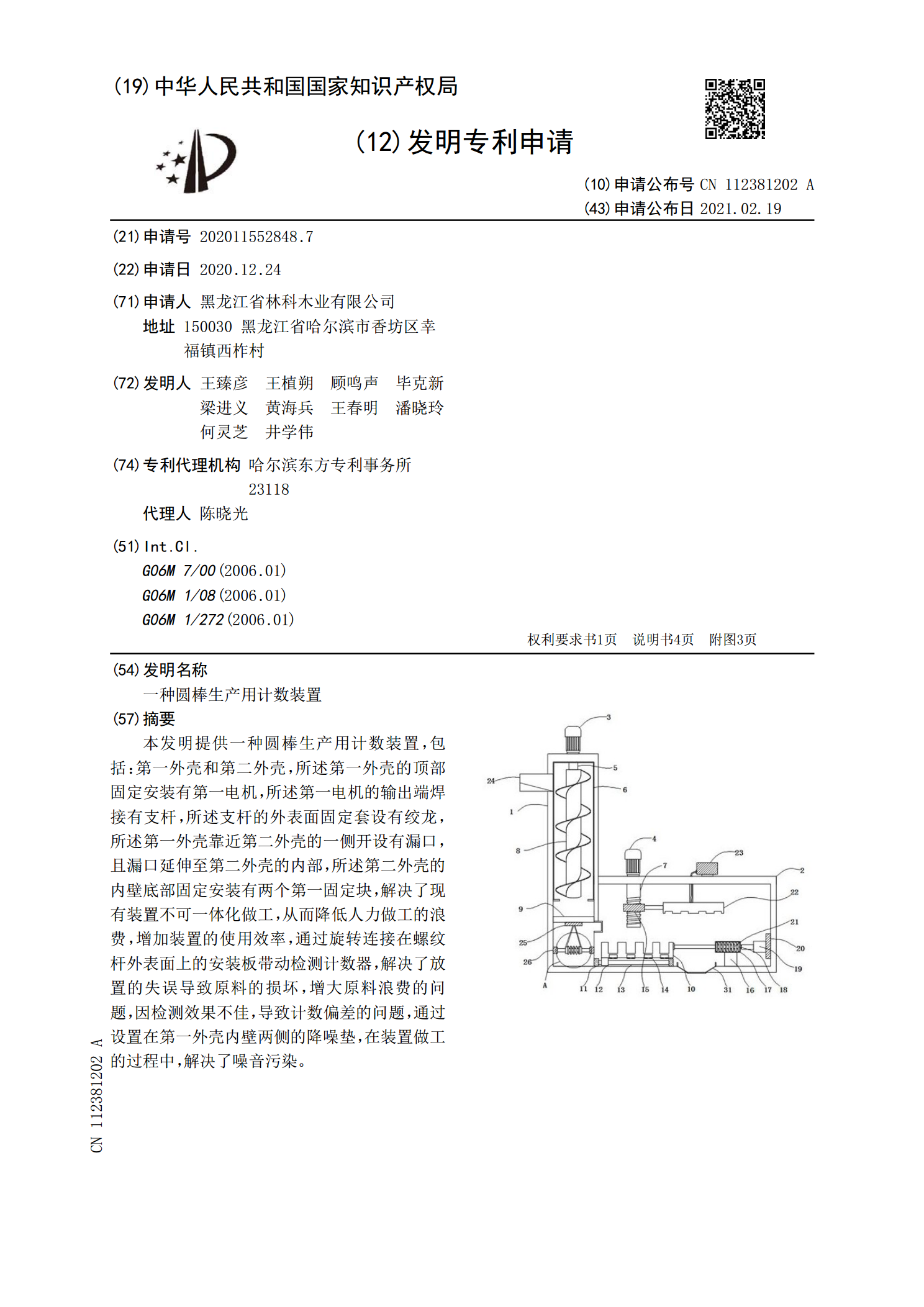
本发明提供一种圆棒生产用计数装置,包括:第一外壳和第二外壳,所述第一外壳的顶部固定安装有第一电机,所述第一电机的输出端焊接有支杆,所述支杆的外表面固定套设有绞龙,所述第一外壳靠近第二外壳的一侧开设有漏口,且漏口延伸至第二外壳的内部,所述第二外壳的内壁底部固定安装有两个第一固定块,解决了现有装置不可一体化做工,从而降低人力做工的浪费,增加装置的使用效率,通过旋转连接在螺纹杆外表面上的安装板带动检测计数器,解决了放置的失误导致原料的损坏,增大原料浪费的问题,因检测效果不佳,导致计数偏差的问题,通过设置在第一外