
一种道路智能巡检机器人.pdf

诗文****仙女

1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种道路智能巡检机器人.pdf
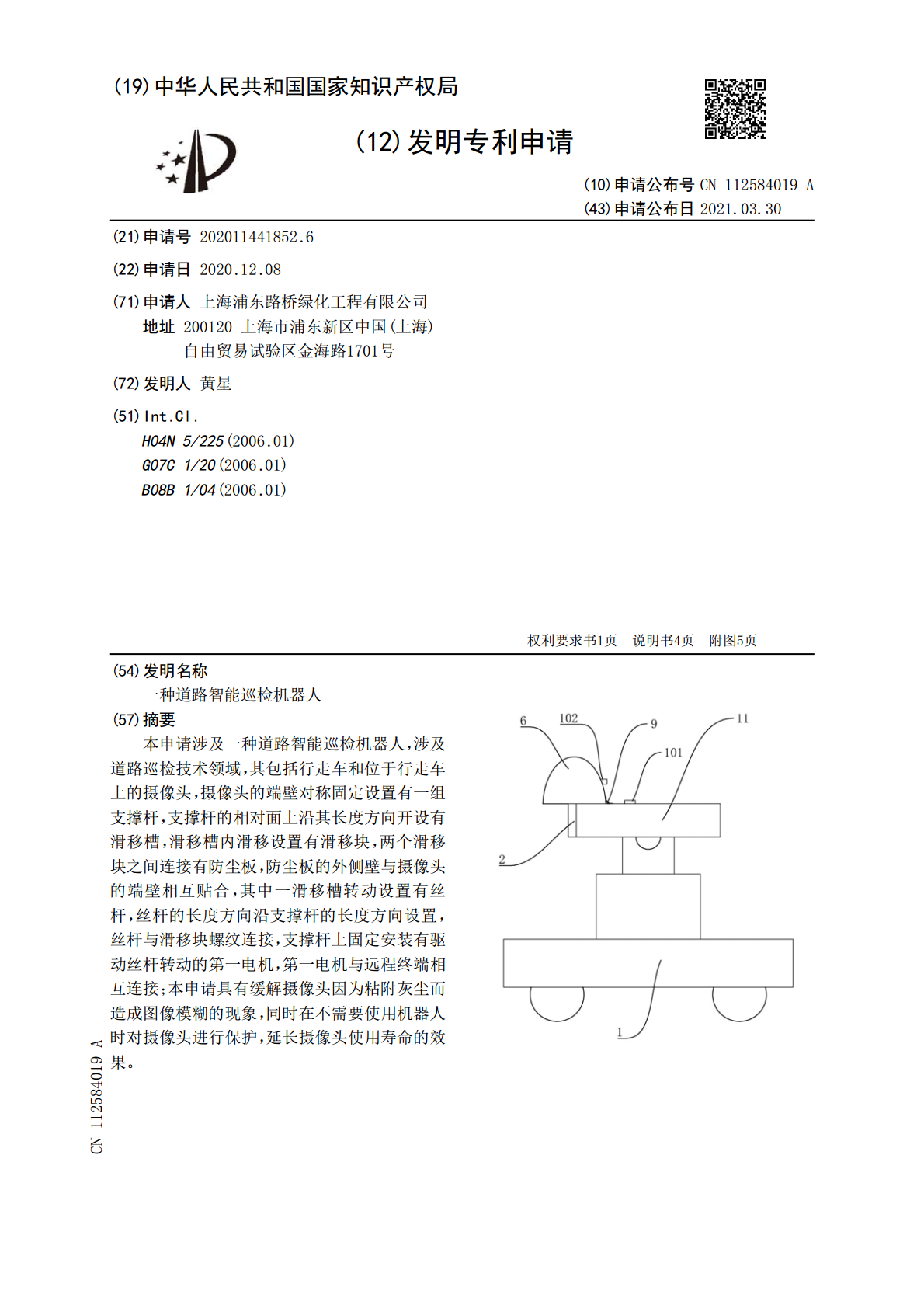
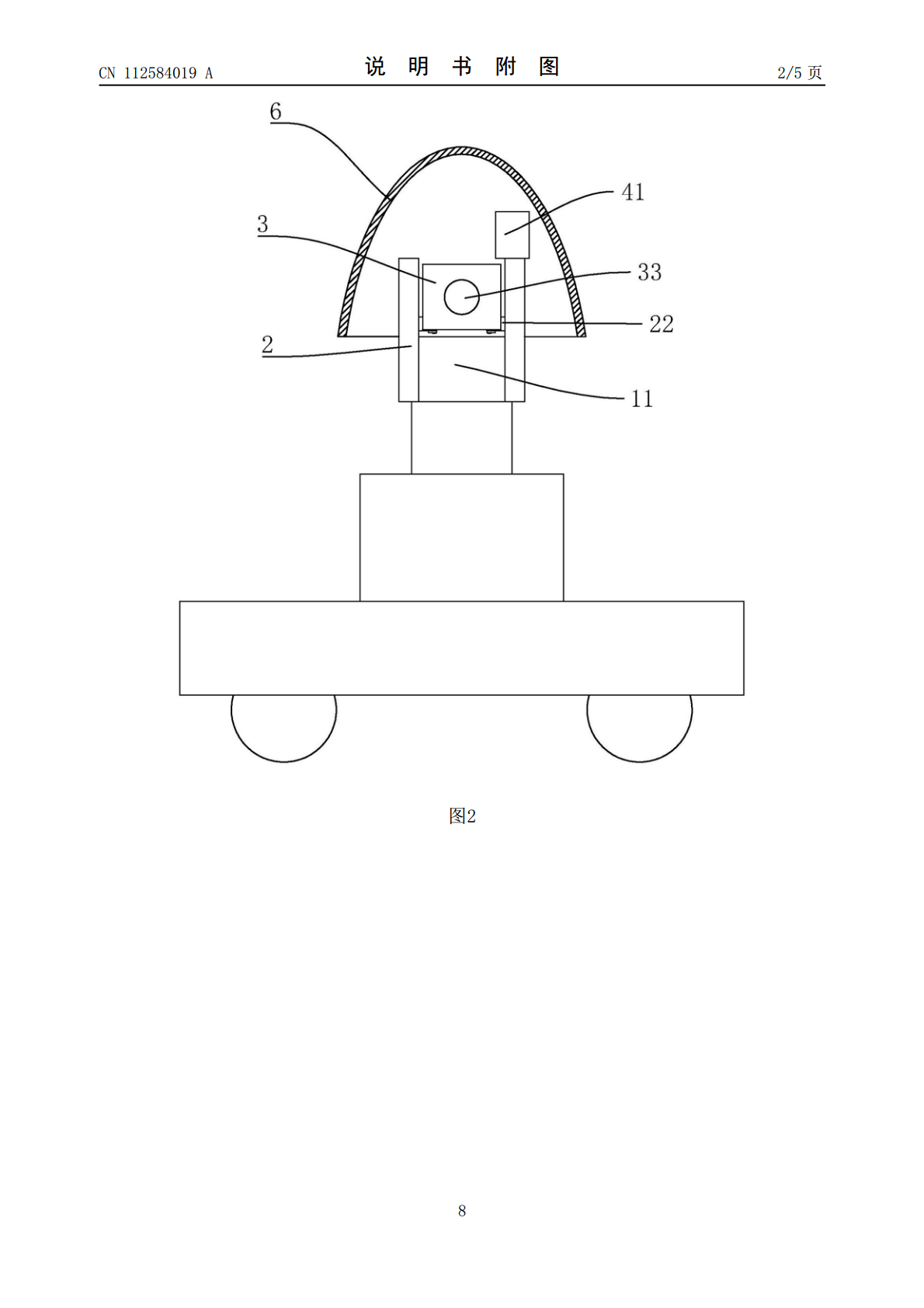
本申请涉及一种道路智能巡检机器人,涉及道路巡检技术领域,其包括行走车和位于行走车上的摄像头,摄像头的端壁对称固定设置有一组支撑杆,支撑杆的相对面上沿其长度方向开设有滑移槽,滑移槽内滑移设置有滑移块,两个滑移块之间连接有防尘板,防尘板的外侧壁与摄像头的端壁相互贴合,其中一滑移槽转动设置有丝杆,丝杆的长度方向沿支撑杆的长度方向设置,丝杆与滑移块螺纹连接,支撑杆上固定安装有驱动丝杆转动的第一电机,第一电机与远程终端相互连接;本申请具有缓解摄像头因为粘附灰尘而造成图像模糊的现象,同时在不需要使用机器人时对摄像头进

一种道路智能巡检机器人.pdf
本发明公开了一种道路智能巡检机器人,涉及道路智能巡检机器人技术领域,解决了道路智能巡检机器人仅仅只能对路段进行巡视,在巡视路段出现塌陷或发生事故时,无法进行应急处理的问题。一种道路智能巡检机器人,包括移动底座,所述移动底座的上方设置有旋转底座,所述旋转底座的四周均活动设置有防护侧板,所述旋转底座的上方设置有机器人主体,所述机器人主体的前表面设置有收纳仓,所述收纳仓的前方活动安装有密封门板,所述密封门板朝向机器人主体的表面设置有两个伸缩支撑杆。本发明通过设置有伸缩支撑杆、警示牌夹持机构、密封门板、警示机构可
一种智能巡检机器人.pdf
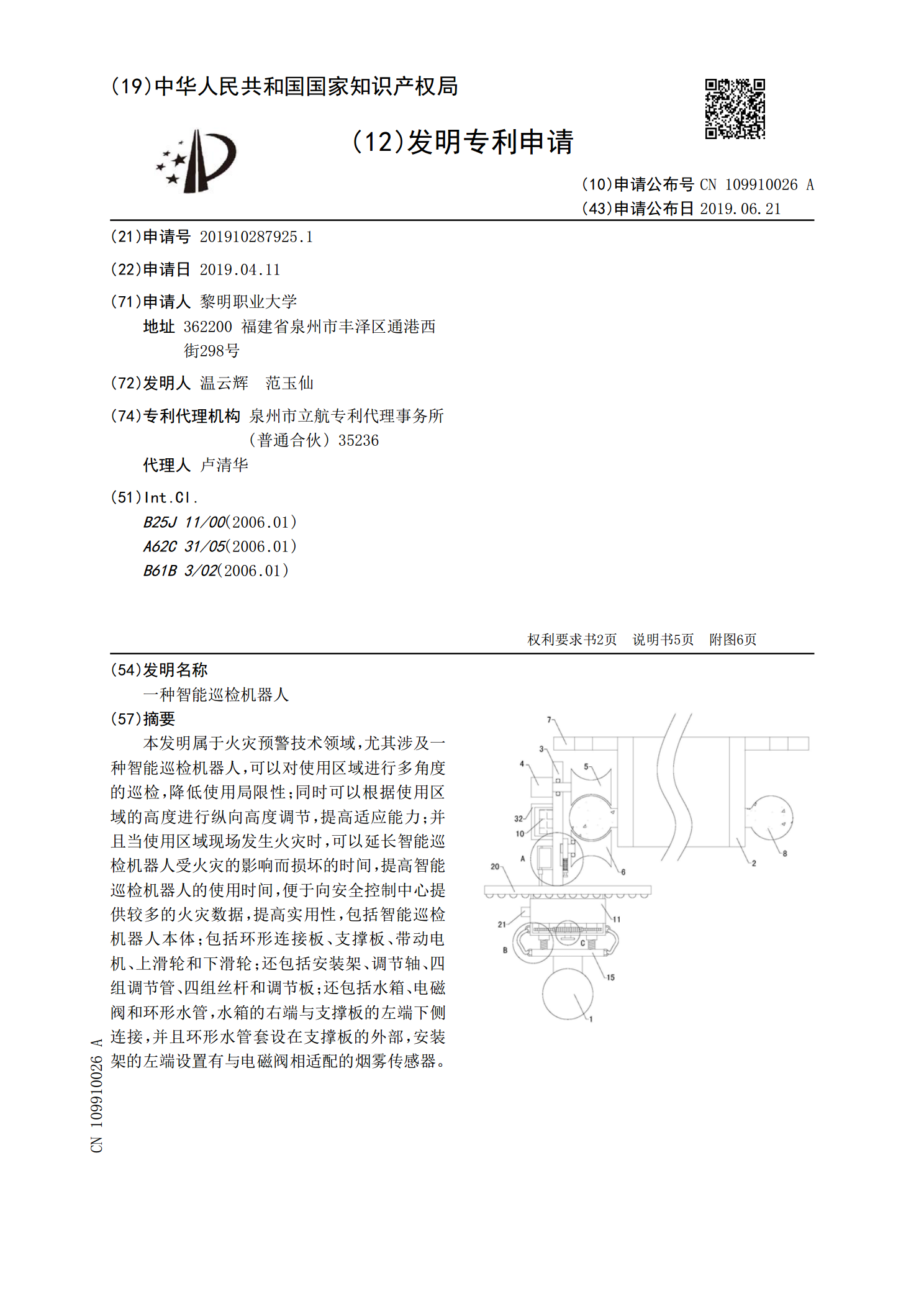
本发明属于火灾预警技术领域,尤其涉及一种智能巡检机器人,可以对使用区域进行多角度的巡检,降低使用局限性;同时可以根据使用区域的高度进行纵向高度调节,提高适应能力;并且当使用区域现场发生火灾时,可以延长智能巡检机器人受火灾的影响而损坏的时间,提高智能巡检机器人的使用时间,便于向安全控制中心提供较多的火灾数据,提高实用性,包括智能巡检机器人本体;包括环形连接板、支撑板、带动电机、上滑轮和下滑轮;还包括安装架、调节轴、四组调节管、四组丝杆和调节板;还包括水箱、电磁阀和环形水管,水箱的右端与支撑板的左端下侧连接,

一种智能巡检机器人.pdf
本发明提供了一种智能巡检机器人,包括机器人本体、云台、云台控制器、工控机、摄像头、补光灯、激光测距仪和拾音器,所述云台设置于所述机器人本体上,所述摄像头、相机和补光灯均设置于所述云台上,所述激光测距仪设置于所述机器人本体的前方,所述拾音器设置于所述机器人本体上,所述机器人的底盘采用双轮差速驱动方式,所述云台控制器用于控制所述云台进行自由旋转,所述工控机固定安装在所述机器人本体上,所述工控机通过无线通信装置与上位机连接。本发明的智能巡检机器人检测精度和效率高,检测范围广。

一种智能巡检机器人.pdf
本发明提供了一种智能巡检机器人,包括巡检机器人本体与驱动机构,所述驱动机构连接车轮带动机器人本体移动,所述机器人本体通过支架安装成像检测盒和照明装置,所述成像检测盒内设有可见光摄像机、红外热成像仪和红外可见光双路视频服务器,障碍探测器位于本体前部,所述支架周围设有两个射频信号接收器,所述机器人本体的两侧均设有两个红外接收器,所述机器人本体上设有温湿度传感器、气体探测器和车载控制器。本发明所述的一种智能巡检机器人通过射频信号接收器感应检测区域多个方向的信号发射器的信号强弱,来判定机器人本体所处位置;由红外接