
一种带有电气故障检测的破拆机器人.pdf

一吃****继勇


1/9
2/9

3/9

4/9

5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种带有电气故障检测的破拆机器人.pdf
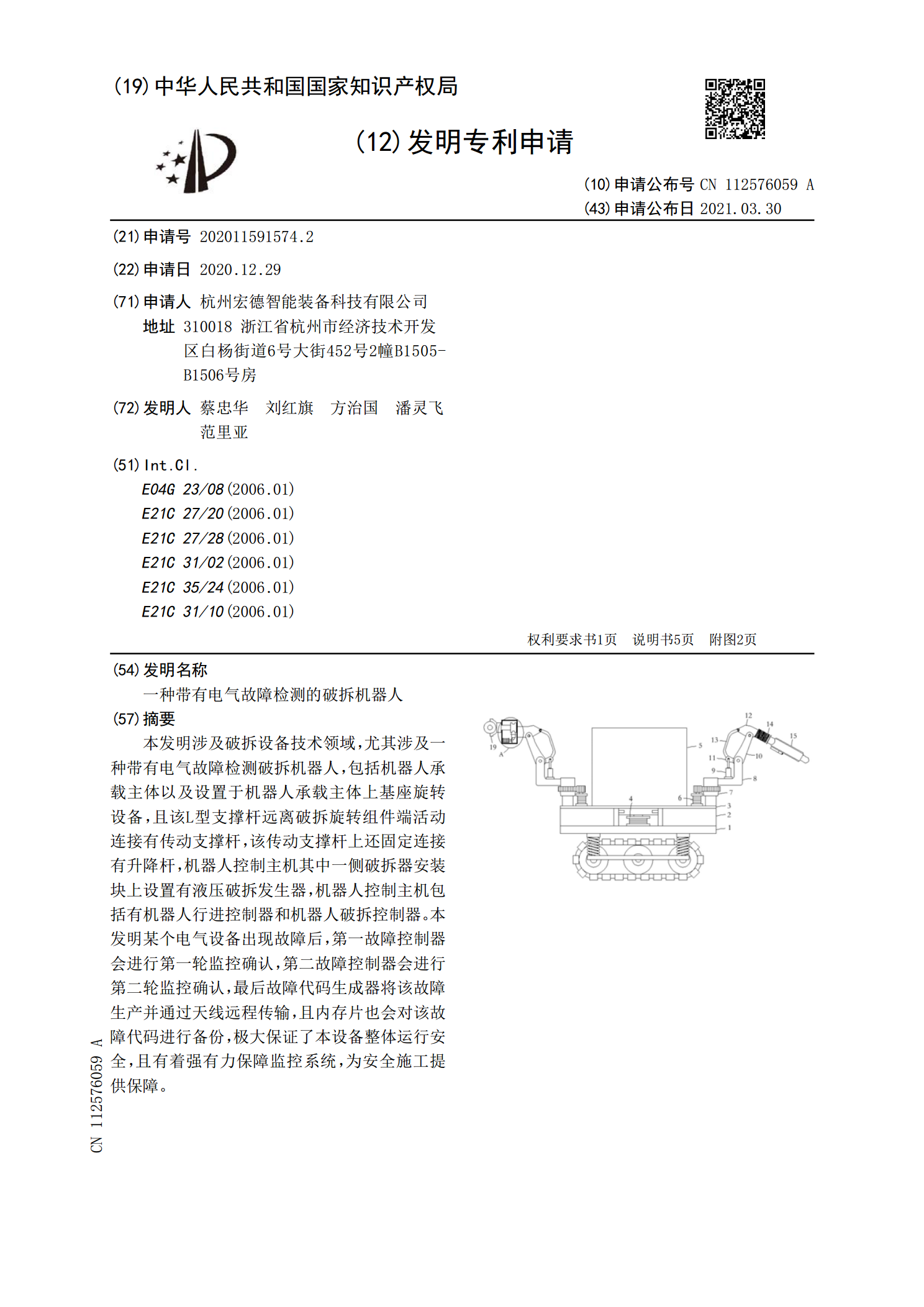
本发明涉及破拆设备技术领域,尤其涉及一种带有电气故障检测破拆机器人,包括机器人承载主体以及设置于机器人承载主体上基座旋转设备,且该L型支撑杆远离破拆旋转组件端活动连接有传动支撑杆,该传动支撑杆上还固定连接有升降杆,机器人控制主机其中一侧破拆器安装块上设置有液压破拆发生器,机器人控制主机包括有机器人行进控制器和机器人破拆控制器。本发明某个电气设备出现故障后,第一故障控制器会进行第一轮监控确认,第二故障控制器会进行第二轮监控确认,最后故障代码生成器将该故障生产并通过天线远程传输,且内存片也会对该故障代码进行备
一种带有电气故障检测的破拆机器人.pdf
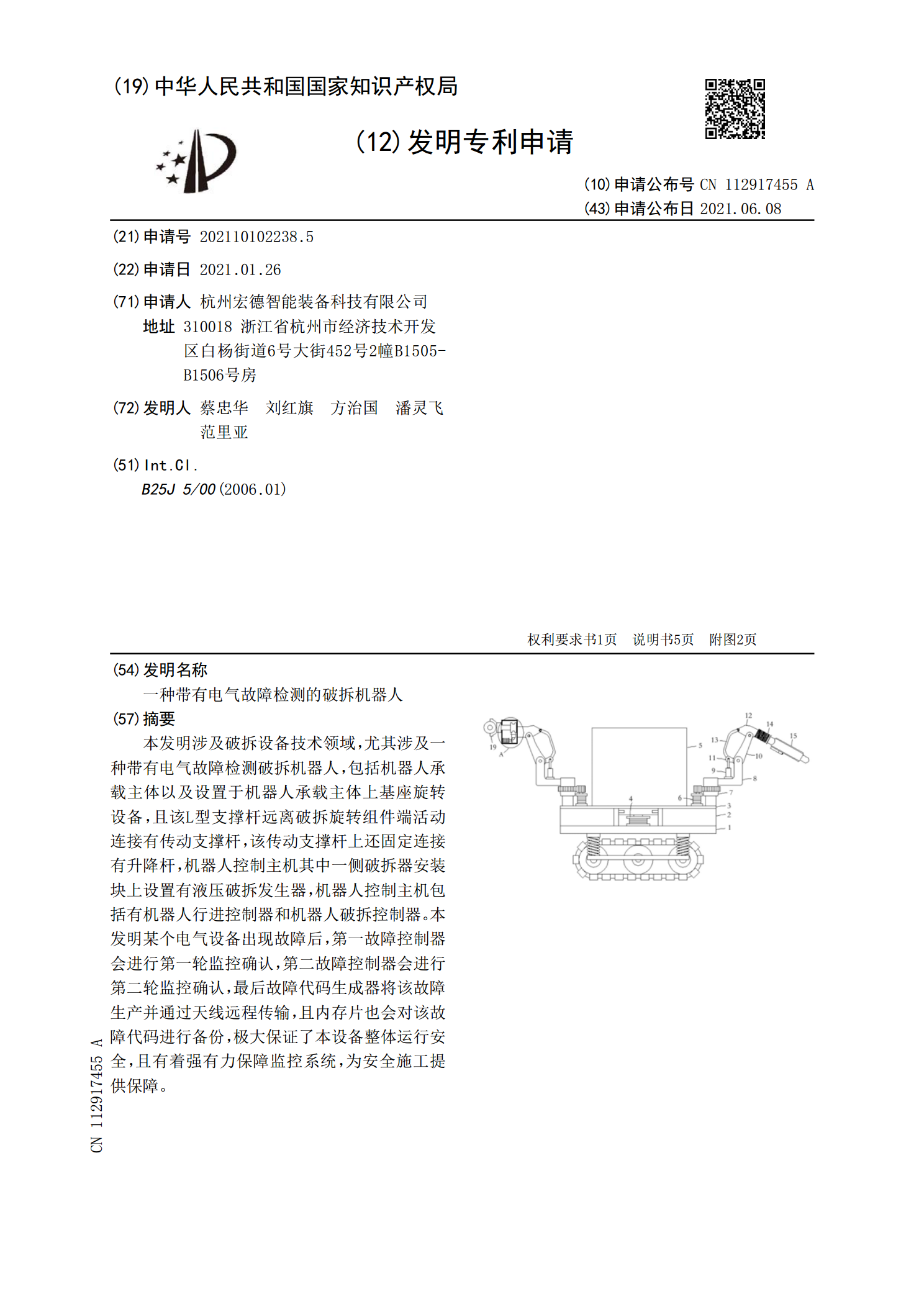
本发明涉及破拆设备技术领域,尤其涉及一种带有电气故障检测破拆机器人,包括机器人承载主体以及设置于机器人承载主体上基座旋转设备,且该L型支撑杆远离破拆旋转组件端活动连接有传动支撑杆,该传动支撑杆上还固定连接有升降杆,机器人控制主机其中一侧破拆器安装块上设置有液压破拆发生器,机器人控制主机包括有机器人行进控制器和机器人破拆控制器。本发明某个电气设备出现故障后,第一故障控制器会进行第一轮监控确认,第二故障控制器会进行第二轮监控确认,最后故障代码生成器将该故障生产并通过天线远程传输,且内存片也会对该故障代码进行备

一种建筑破拆绳锯机器人.pdf
本发明涉及建筑废弃构件破拆技术领域,且公开了一种建筑破拆绳锯机器人,包括底座,所述底座上设有行走机构,所述底座上设有支撑板,所述支撑板上设有绳锯切割组件,所述绳锯切割组件上设有机器人位置校准组件,所述机器人位置校准组件包括设在绳锯切割组件上的固定块,所述固定块上沿切割方向阻尼滑动设有插杆,所述插杆一端连接有连接块,所述连接块侧面对称设有两组第一压力传感器,还包括手持控制终端。该建筑破拆绳锯机器人能够通过设置的机器人位置校准组件,来保证锯绳切割方向与建筑物长度方向之间的垂直度足够高,从而保证了切割长度最短,

一种排涝破拆一体化机器人底盘.pdf
本实用新型公开了一种排涝破拆一体化机器人底盘,包括底盘车架、水泵支架、水泵、水泵升降机构、出水接口以及行走机构;所述水泵固定在所述水泵支架上,所述水泵的出水口通过水带连接所述出水接口,所述水泵升降机构连接所述水泵支架,所述水泵升降机构包括液压油缸,所述液压油缸通过销轴连接所述水泵支架,通过液压油缸内运动件的直线位移运动来驱动水泵支架及水泵的升降,所述行走机构与所述底盘车架连接,所述行走机构用于驱动机器人行走。可通过液压油缸的收放实现水泵的升降,从而进行不同深度的积水区域的排水作业。
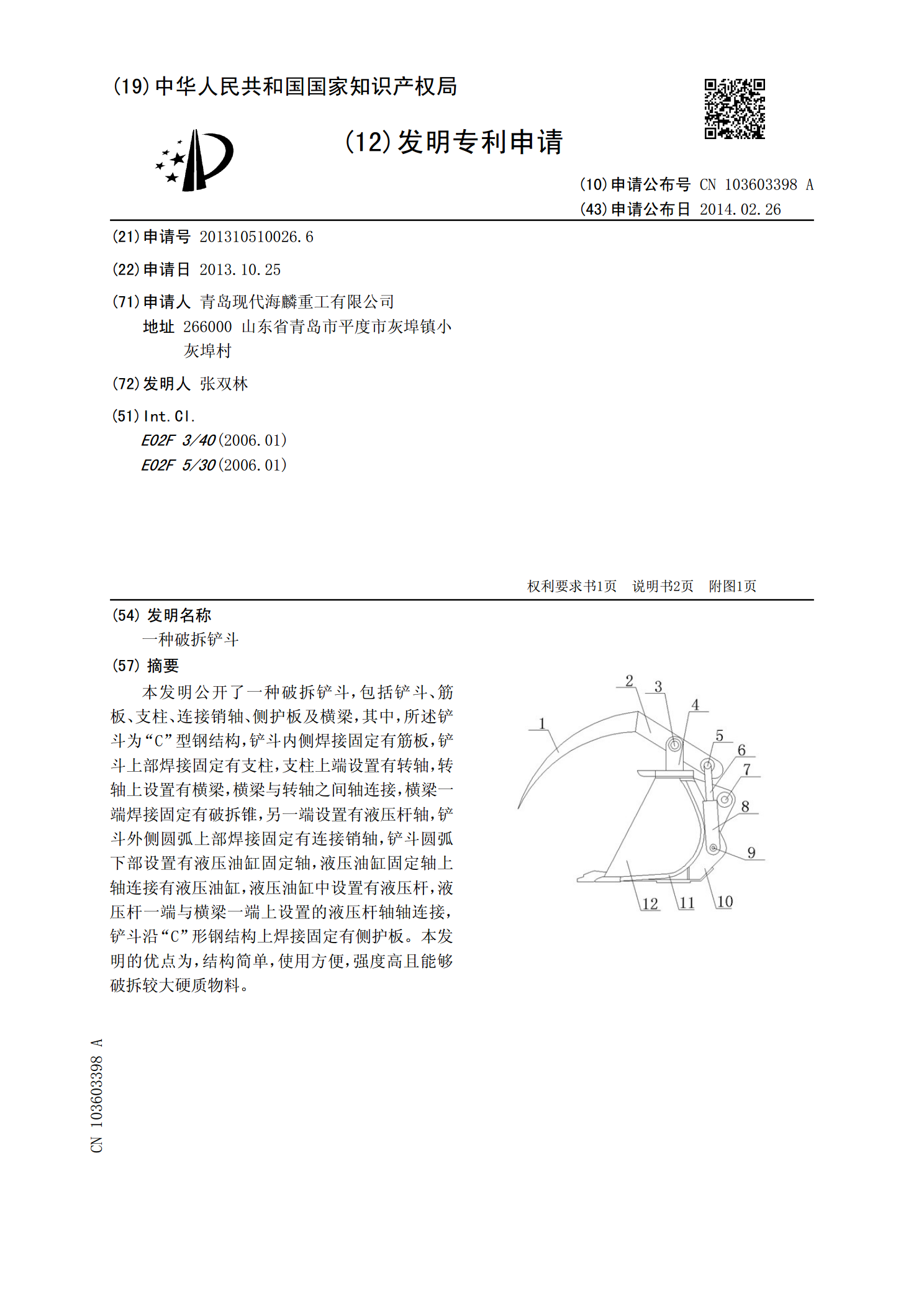
一种破拆铲斗.pdf
本发明公开了一种破拆铲斗,包括铲斗、筋板、支柱、连接销轴、侧护板及横梁,其中,所述铲斗为“C”型钢结构,铲斗内侧焊接固定有筋板,铲斗上部焊接固定有支柱,支柱上端设置有转轴,转轴上设置有横梁,横梁与转轴之间轴连接,横梁一端焊接固定有破拆锥,另一端设置有液压杆轴,铲斗外侧圆弧上部焊接固定有连接销轴,铲斗圆弧下部设置有液压油缸固定轴,液压油缸固定轴上轴连接有液压油缸,液压油缸中设置有液压杆,液压杆一端与横梁一端上设置的液压杆轴轴连接,铲斗沿“C”形钢结构上焊接固定有侧护板。本发明的优点为,结构简单,使用方便,强