
一种输煤皮带的非接触式智能巡检装置.pdf

小代****回来

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种输煤皮带的非接触式智能巡检装置.pdf
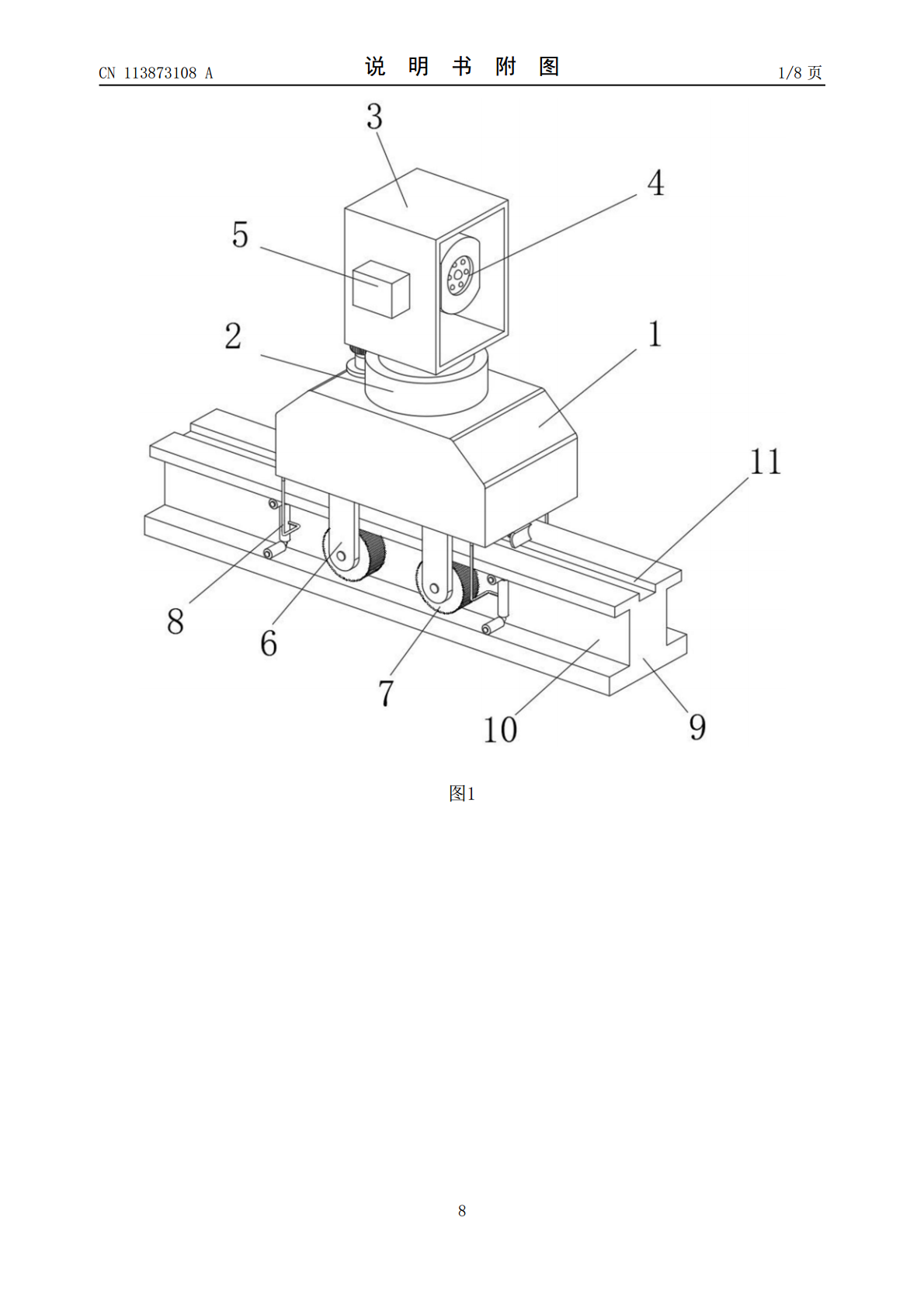
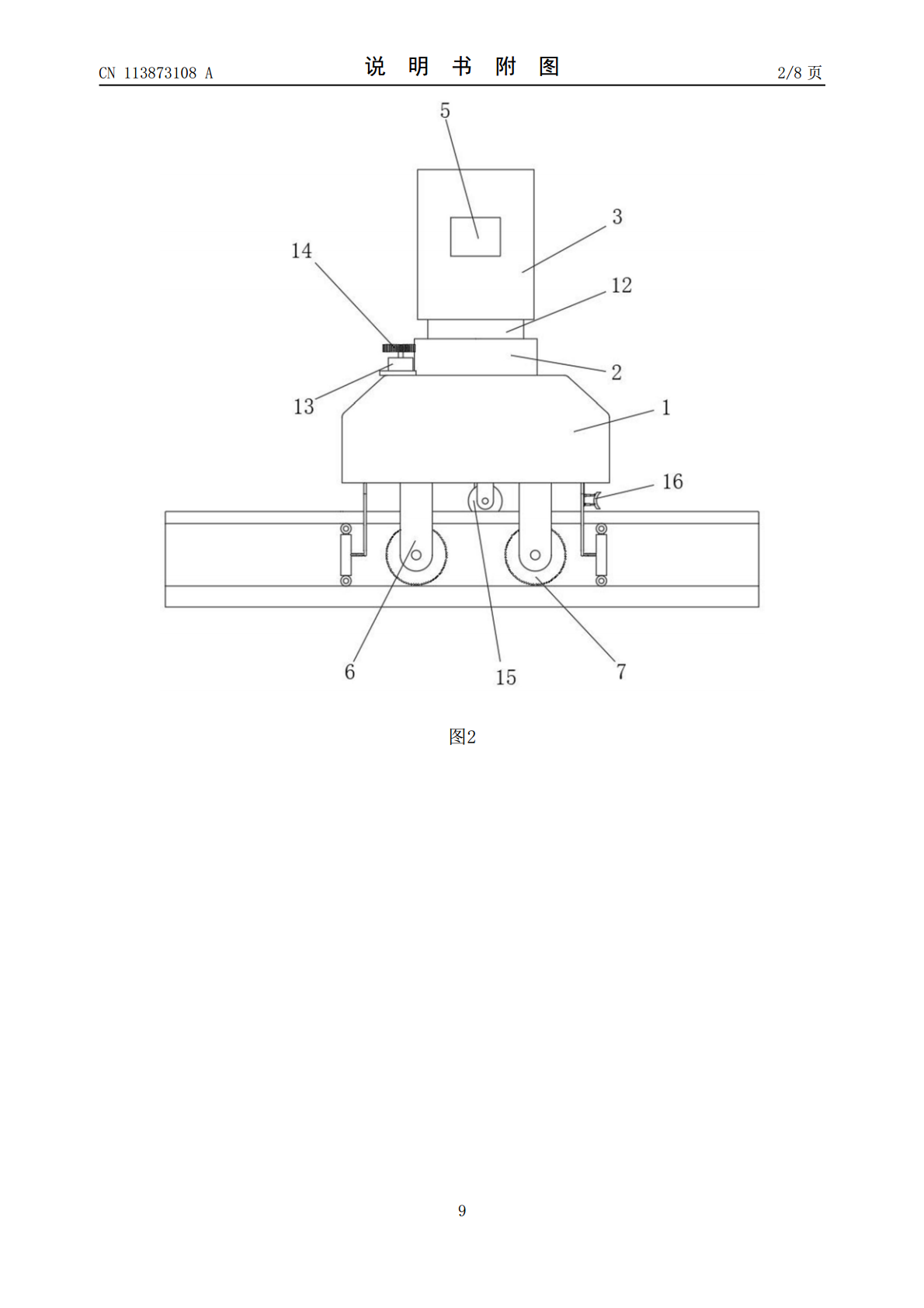
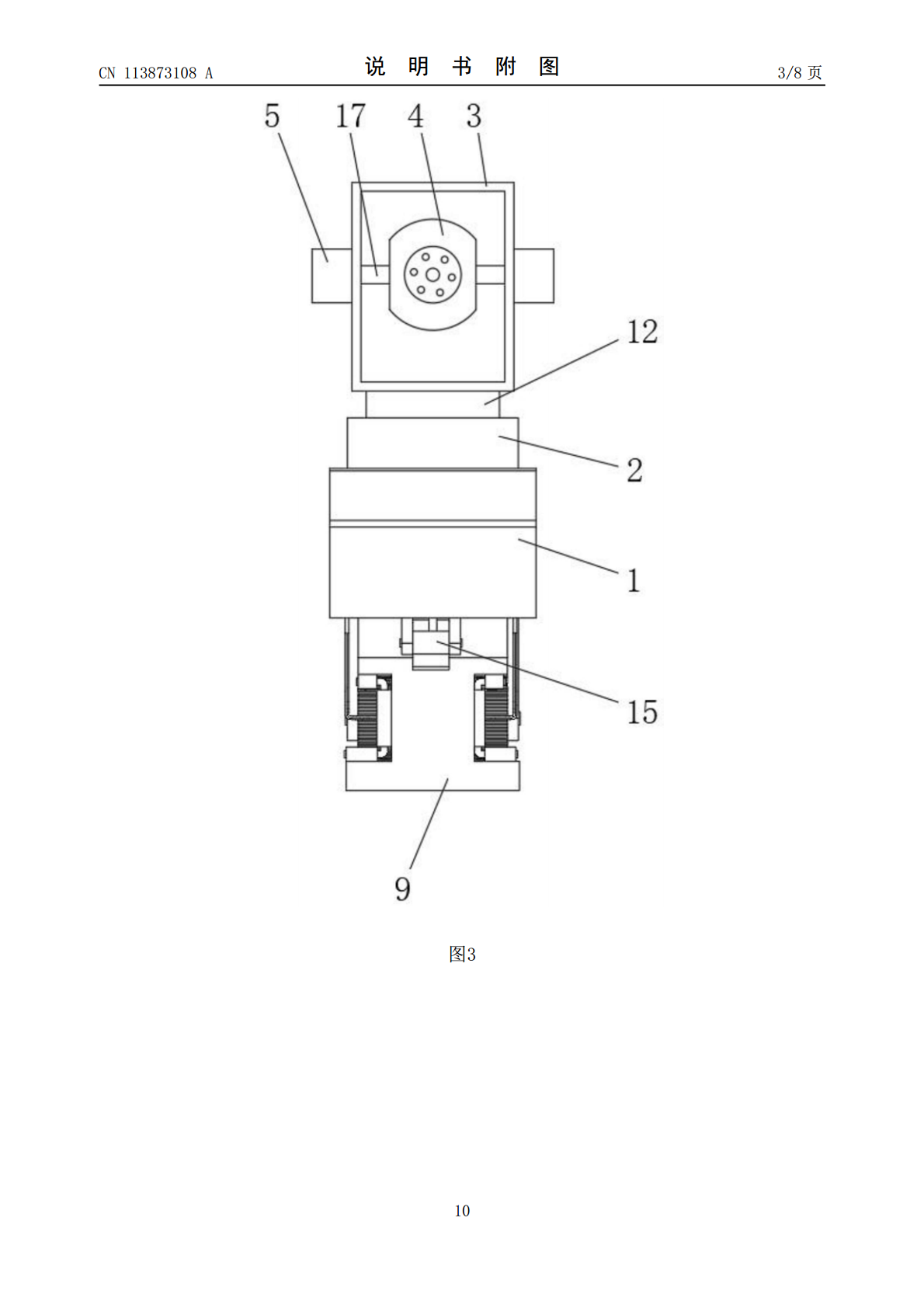
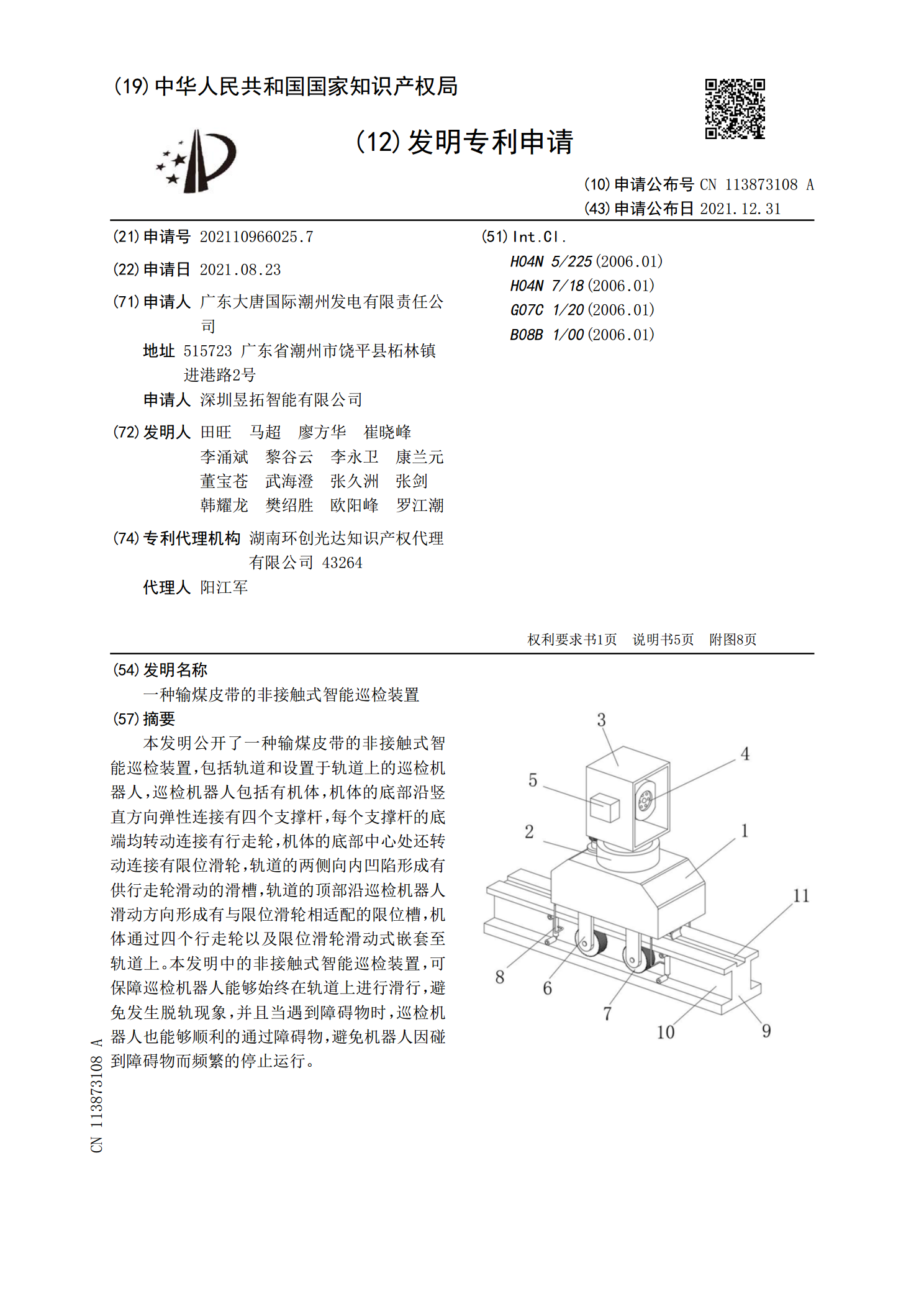
本发明公开了一种输煤皮带的非接触式智能巡检装置,包括轨道和设置于轨道上的巡检机器人,巡检机器人包括有机体,机体的底部沿竖直方向弹性连接有四个支撑杆,每个支撑杆的底端均转动连接有行走轮,机体的底部中心处还转动连接有限位滑轮,轨道的两侧向内凹陷形成有供行走轮滑动的滑槽,轨道的顶部沿巡检机器人滑动方向形成有与限位滑轮相适配的限位槽,机体通过四个行走轮以及限位滑轮滑动式嵌套至轨道上。本发明中的非接触式智能巡检装置,可保障巡检机器人能够始终在轨道上进行滑行,避免发生脱轨现象,并且当遇到障碍物时,巡检机器人也能够顺利
一种火电机组输煤皮带智能巡检系统.pdf
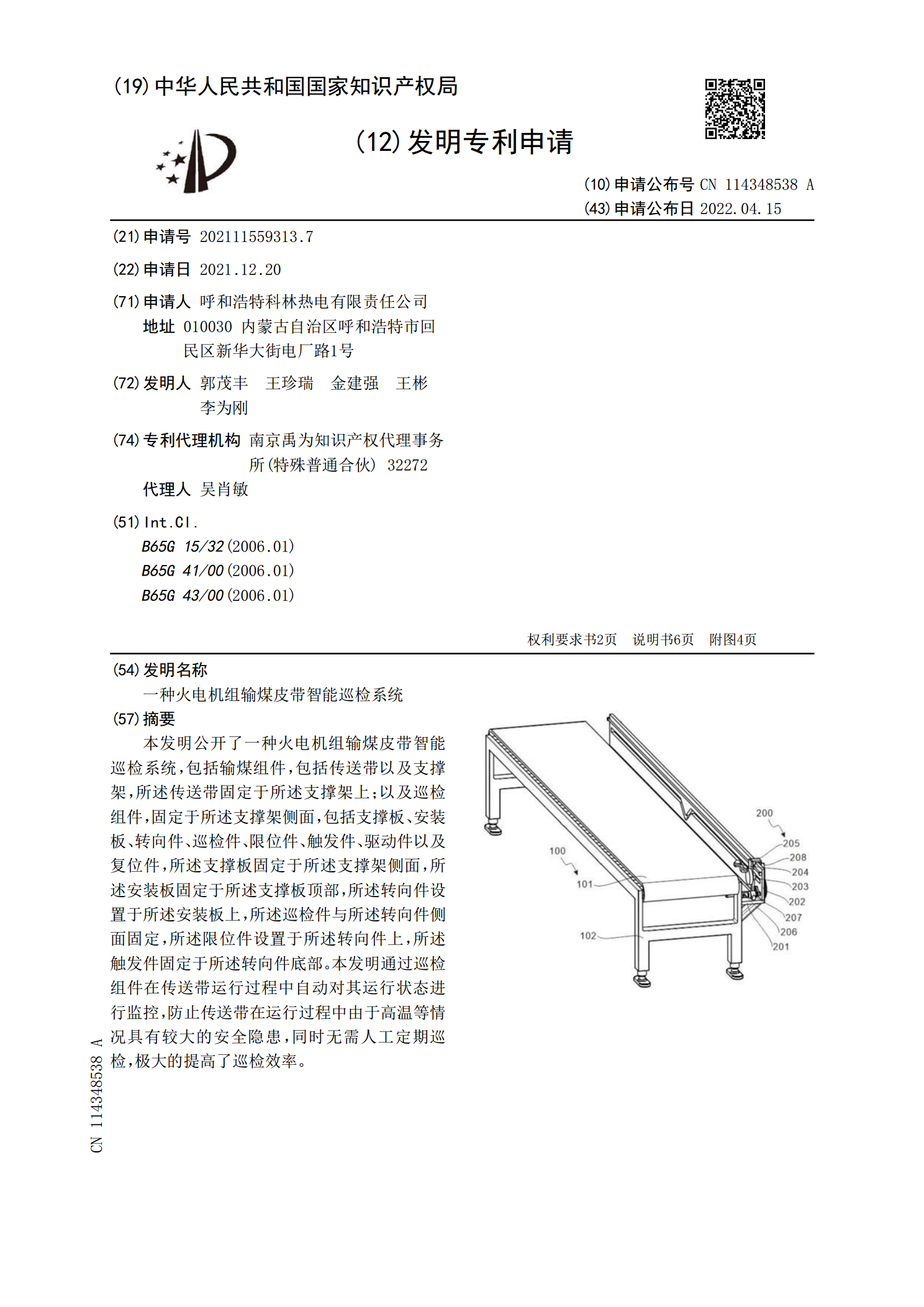
本发明公开了一种火电机组输煤皮带智能巡检系统,包括输煤组件,包括传送带以及支撑架,所述传送带固定于所述支撑架上;以及巡检组件,固定于所述支撑架侧面,包括支撑板、安装板、转向件、巡检件、限位件、触发件、驱动件以及复位件,所述支撑板固定于所述支撑架侧面,所述安装板固定于所述支撑板顶部,所述转向件设置于所述安装板上,所述巡检件与所述转向件侧面固定,所述限位件设置于所述转向件上,所述触发件固定于所述转向件底部。本发明通过巡检组件在传送带运行过程中自动对其运行状态进行监控,防止传送带在运行过程中由于高温等情况具有较
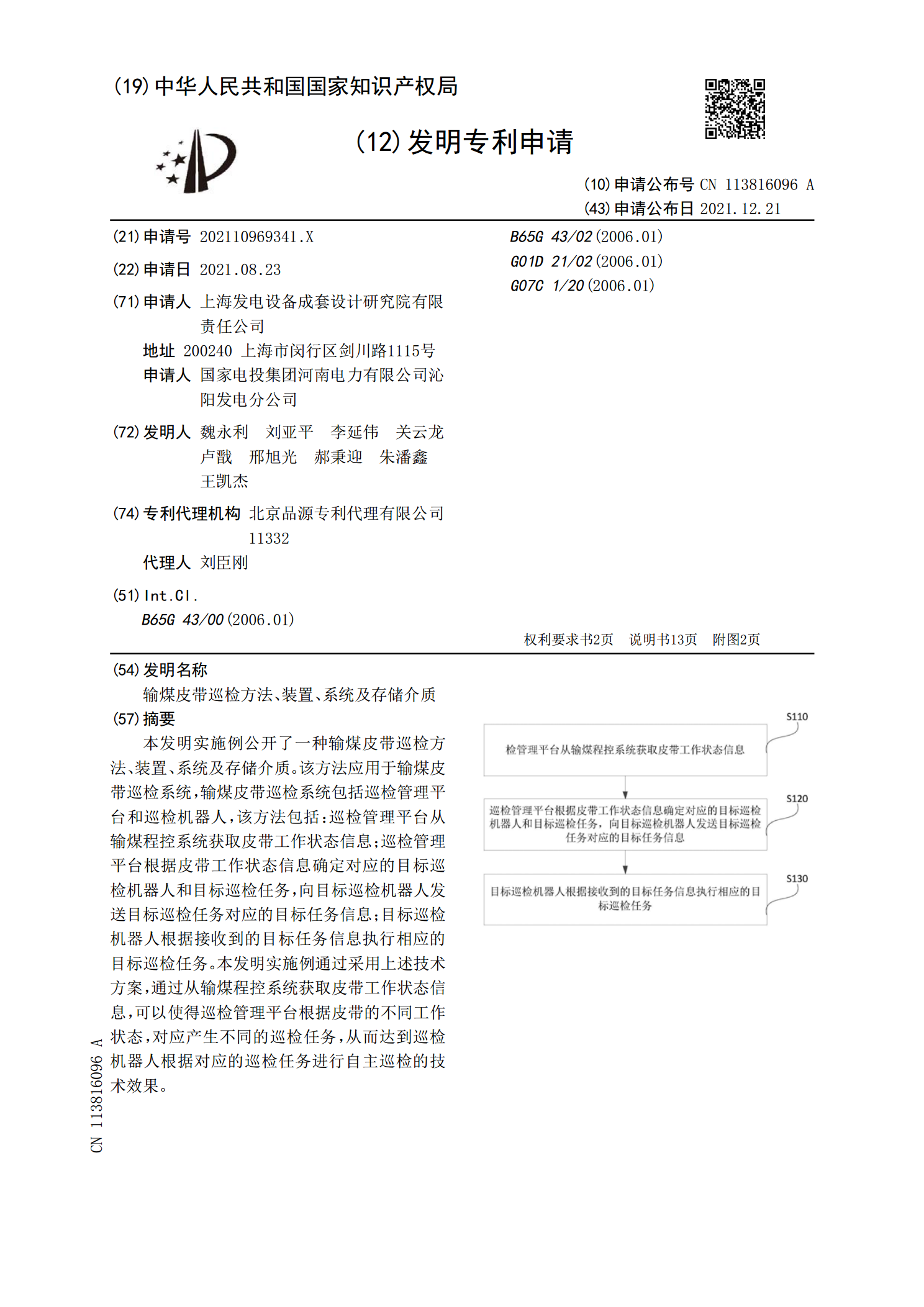
输煤皮带巡检方法、装置、系统及存储介质.pdf
本发明实施例公开了一种输煤皮带巡检方法、装置、系统及存储介质。该方法应用于输煤皮带巡检系统,输煤皮带巡检系统包括巡检管理平台和巡检机器人,该方法包括:巡检管理平台从输煤程控系统获取皮带工作状态信息;巡检管理平台根据皮带工作状态信息确定对应的目标巡检机器人和目标巡检任务,向目标巡检机器人发送目标巡检任务对应的目标任务信息;目标巡检机器人根据接收到的目标任务信息执行相应的目标巡检任务。本发明实施例通过采用上述技术方案,通过从输煤程控系统获取皮带工作状态信息,可以使得巡检管理平台根据皮带的不同工作状态,对应产生
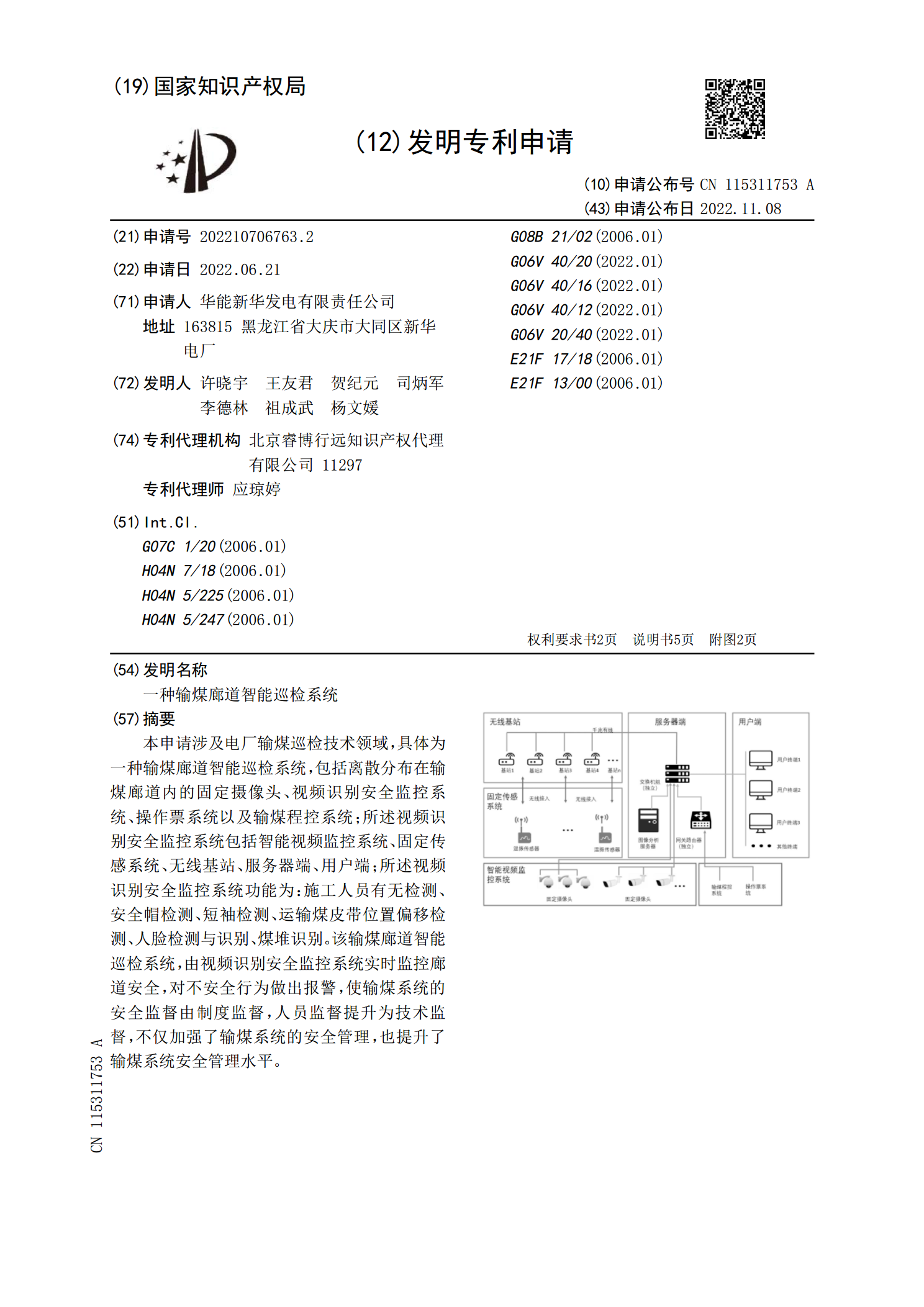
一种输煤廊道智能巡检系统.pdf
本申请涉及电厂输煤巡检技术领域,具体为一种输煤廊道智能巡检系统,包括离散分布在输煤廊道内的固定摄像头、视频识别安全监控系统、操作票系统以及输煤程控系统;所述视频识别安全监控系统包括智能视频监控系统、固定传感系统、无线基站、服务器端、用户端;所述视频识别安全监控系统功能为:施工人员有无检测、安全帽检测、短袖检测、运输煤皮带位置偏移检测、人脸检测与识别、煤堆识别。该输煤廊道智能巡检系统,由视频识别安全监控系统实时监控廊道安全,对不安全行为做出报警,使输煤系统的安全监督由制度监督,人员监督提升为技术监督,不仅加
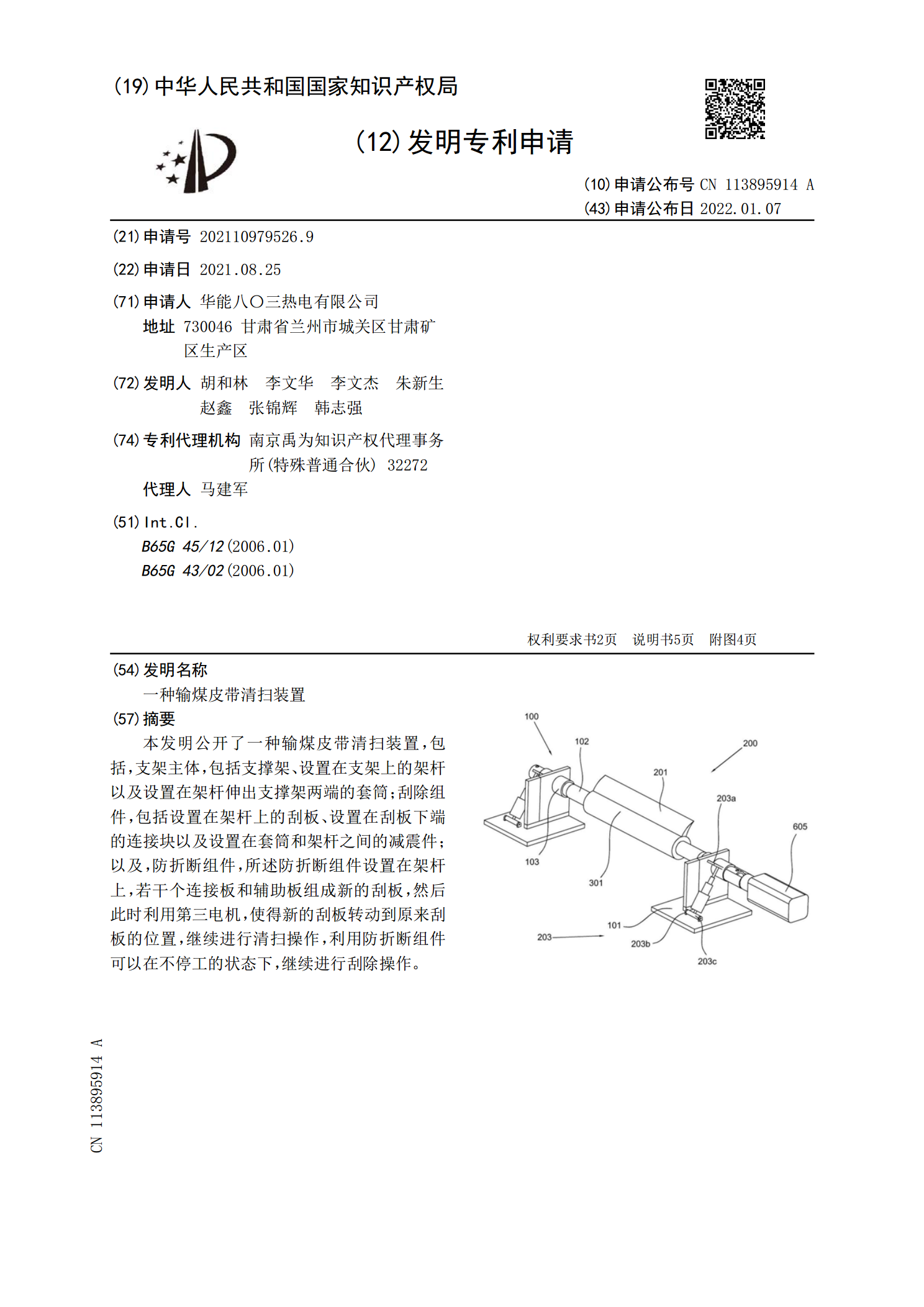
一种输煤皮带清扫装置.pdf
本发明公开了一种输煤皮带清扫装置,包括,支架主体,包括支撑架、设置在支架上的架杆以及设置在架杆伸出支撑架两端的套筒;刮除组件,包括设置在架杆上的刮板、设置在刮板下端的连接块以及设置在套筒和架杆之间的减震件;以及,防折断组件,所述防折断组件设置在架杆上,若干个连接板和辅助板组成新的刮板,然后此时利用第三电机,使得新的刮板转动到原来刮板的位置,继续进行清扫操作,利用防折断组件可以在不停工的状态下,继续进行刮除操作。