
一种弯管内壁智能检测与精密打磨机器人.pdf

是你****枝呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种弯管内壁智能检测与精密打磨机器人.pdf
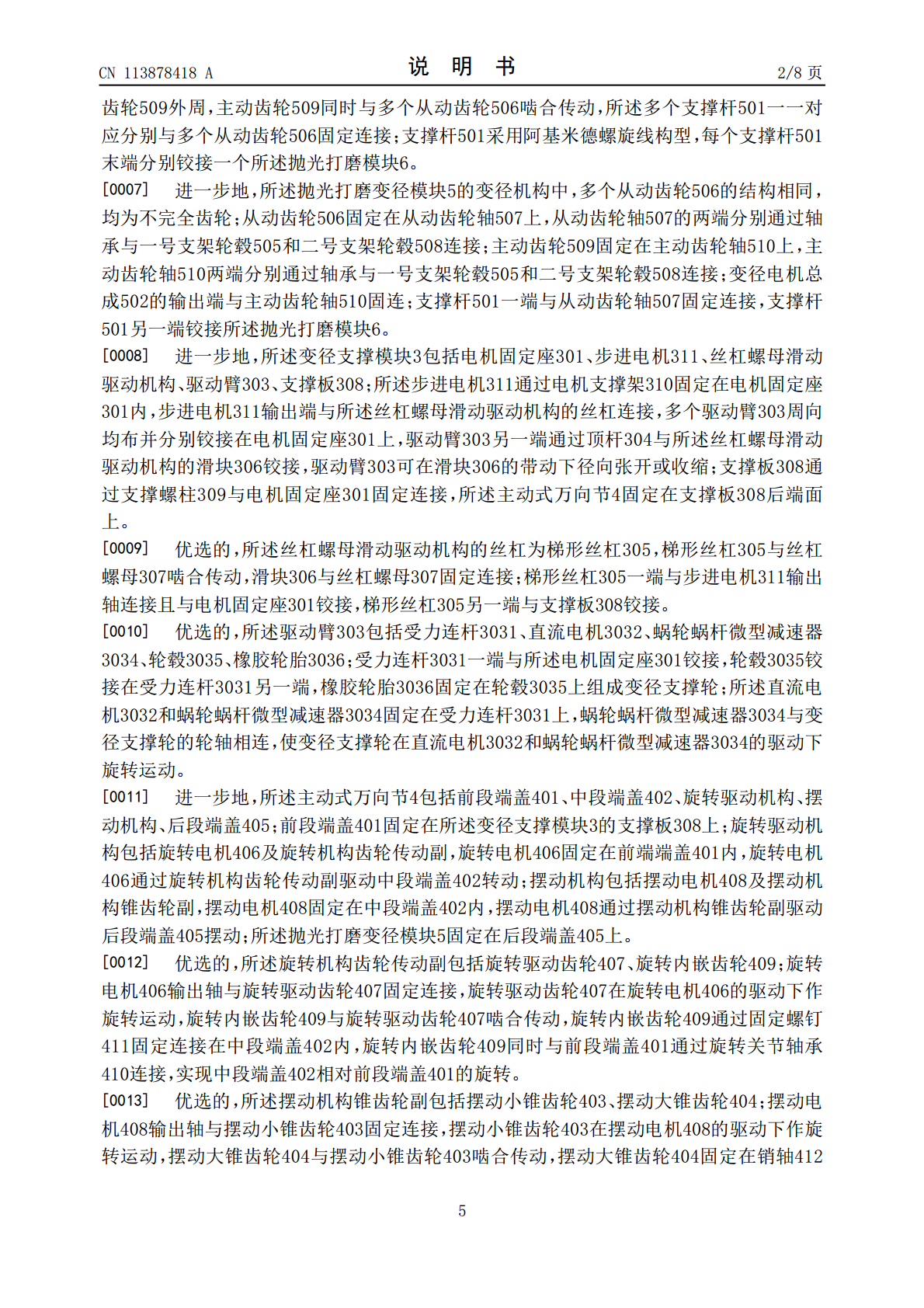
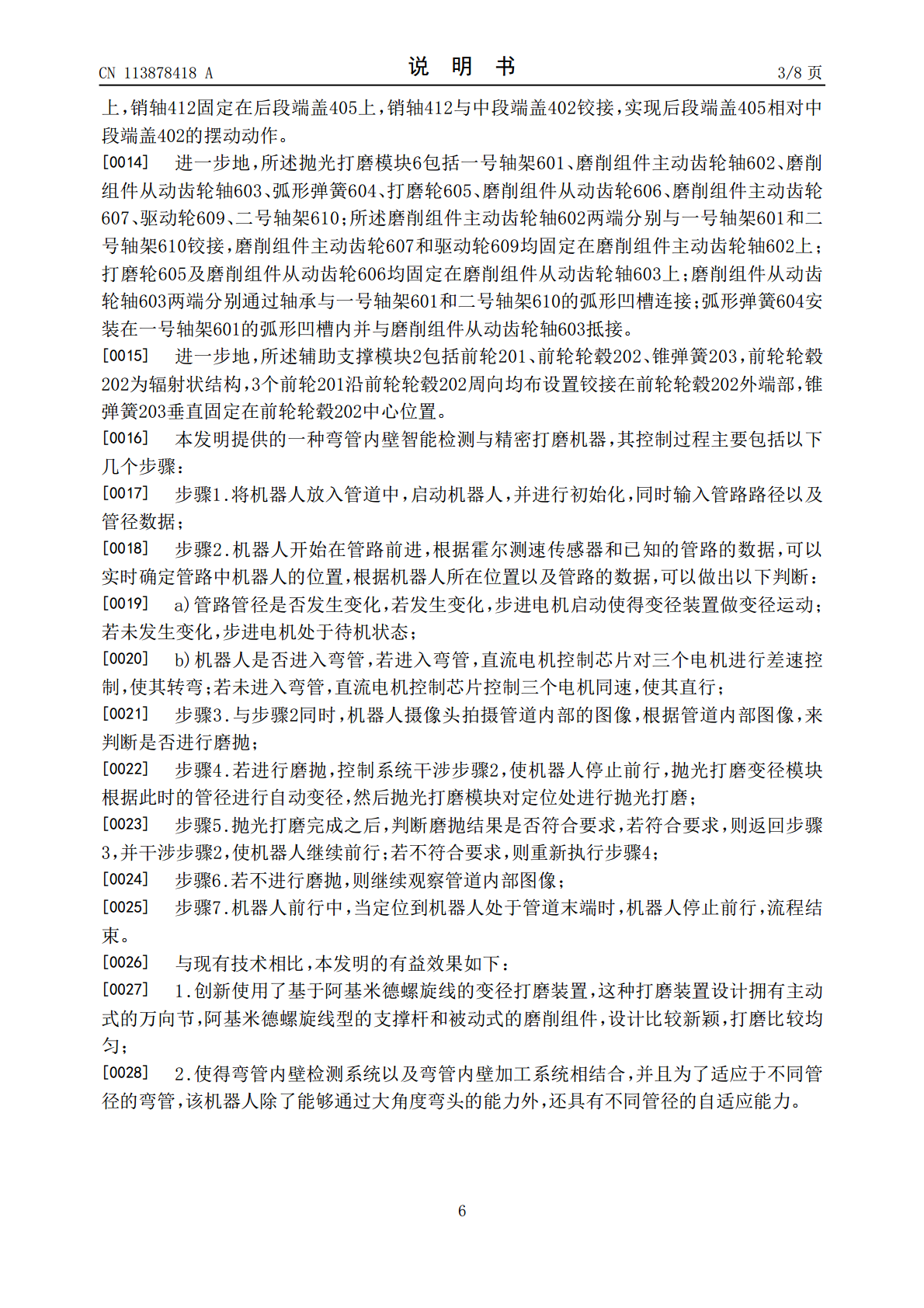
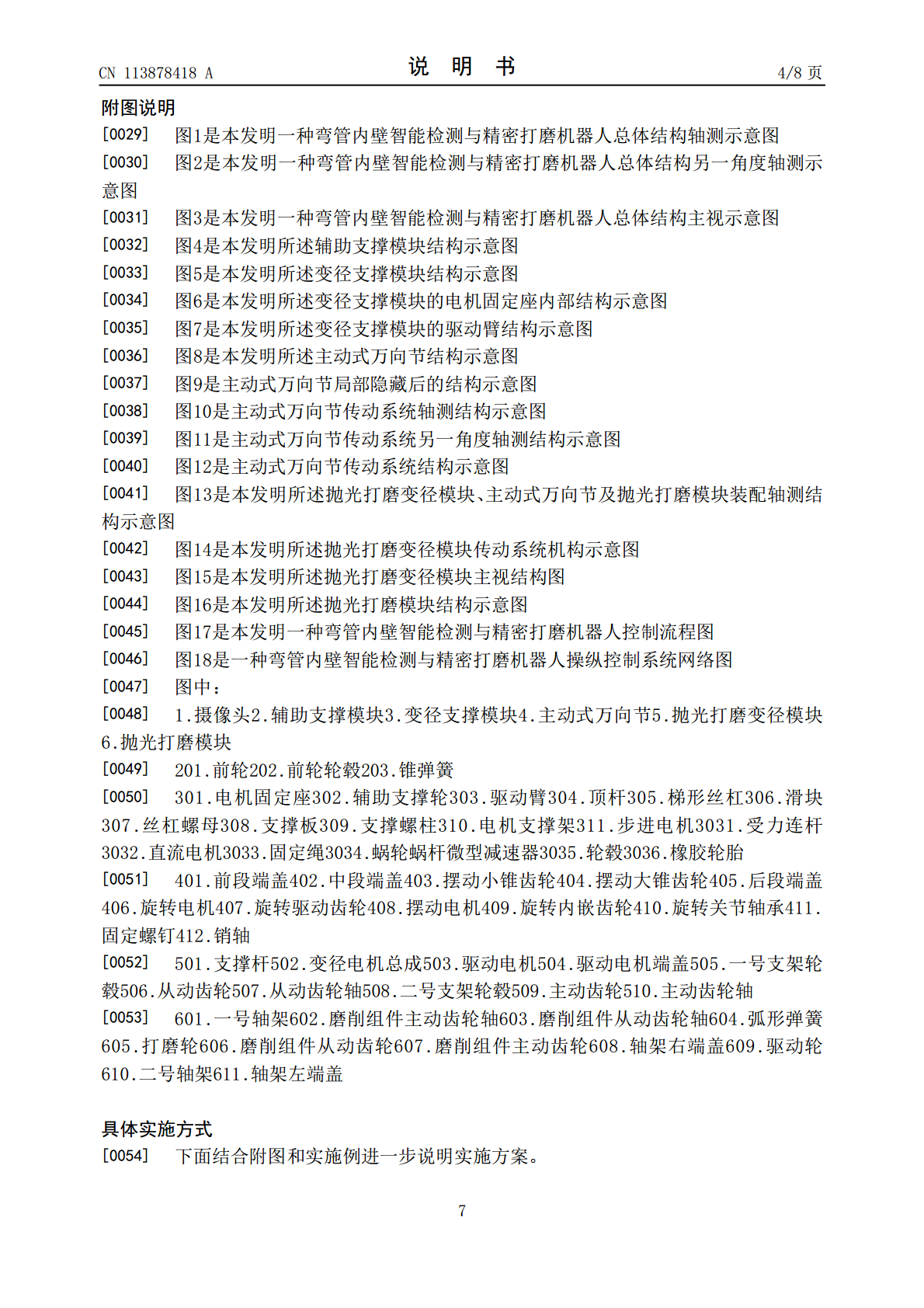
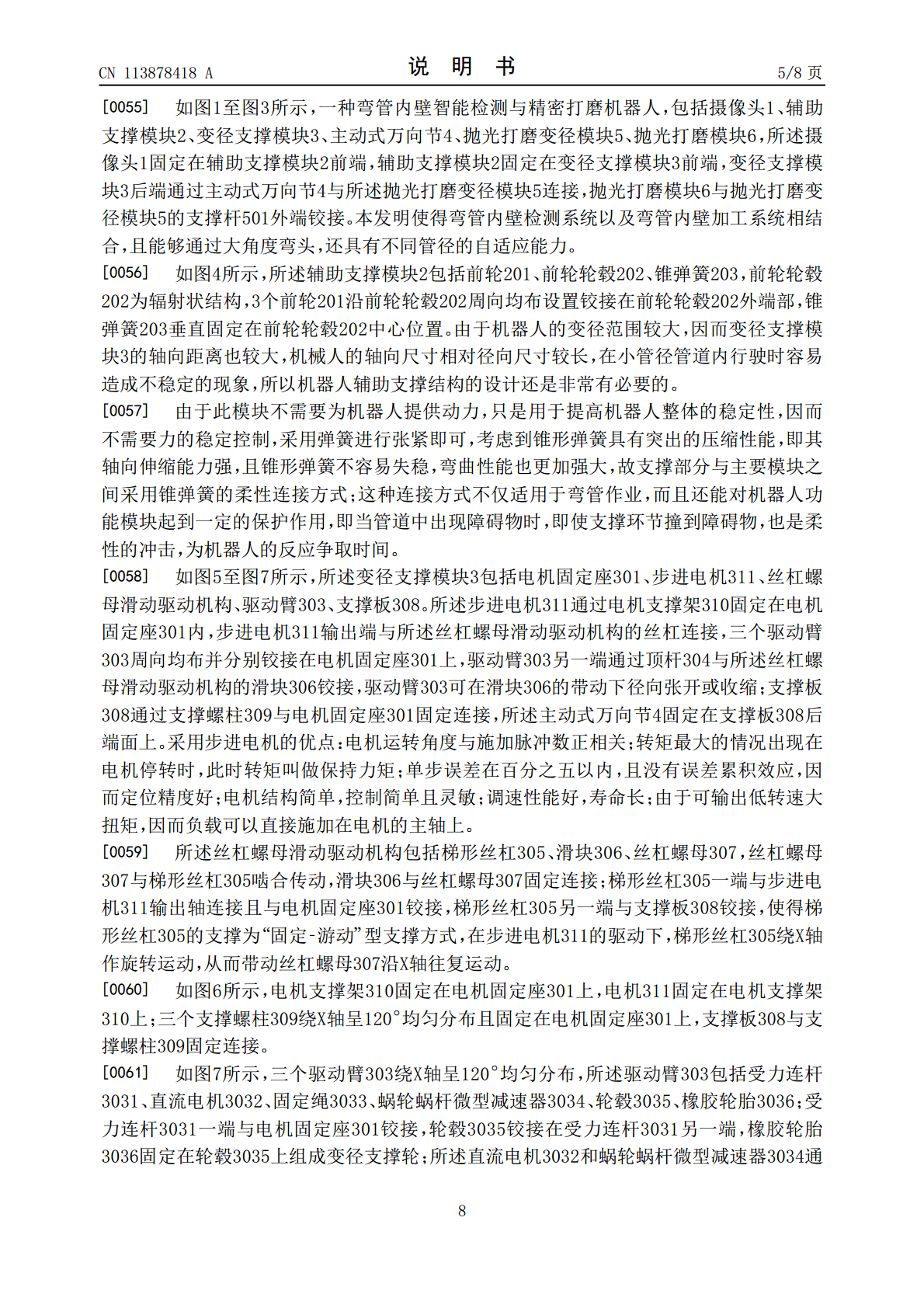
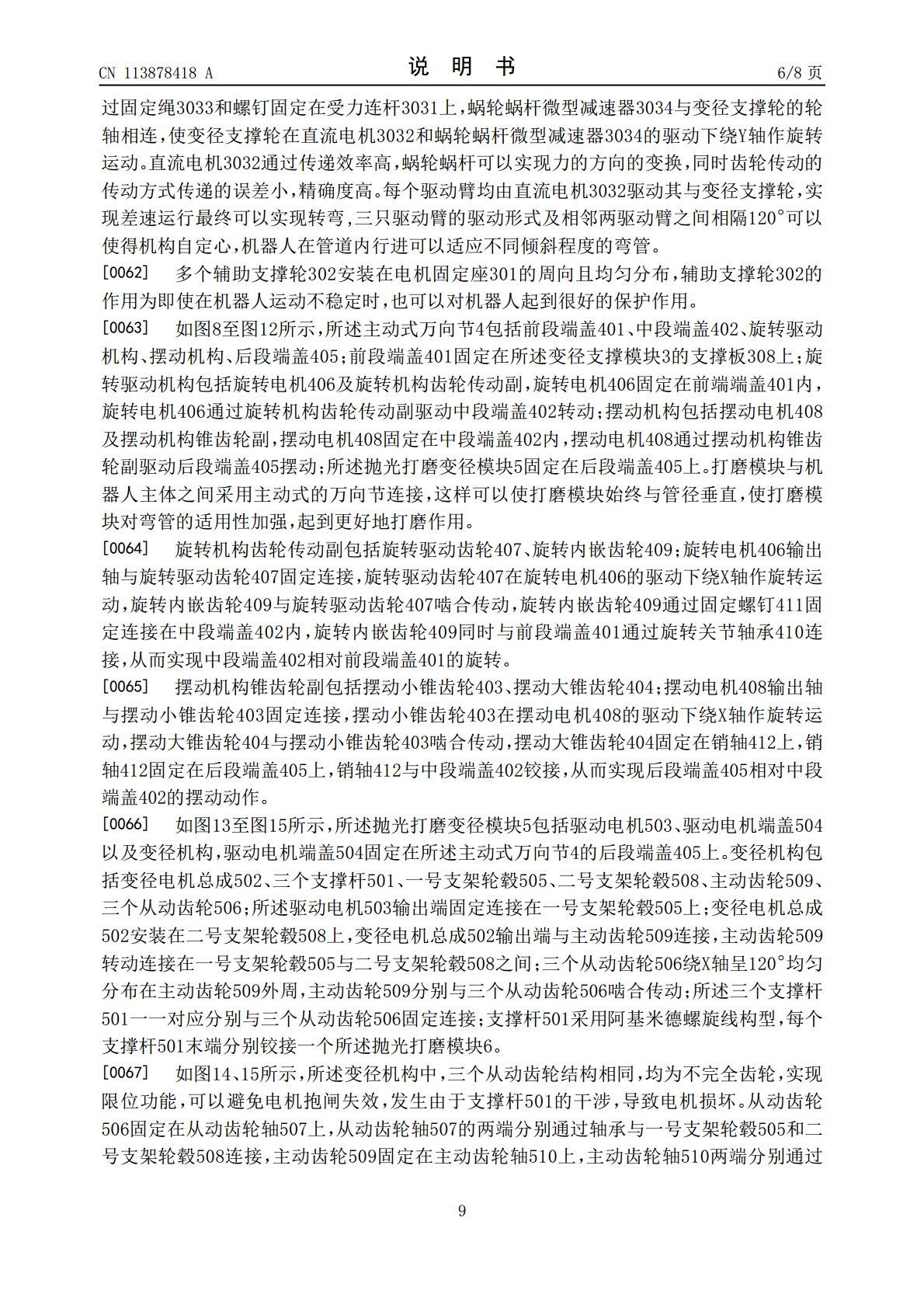
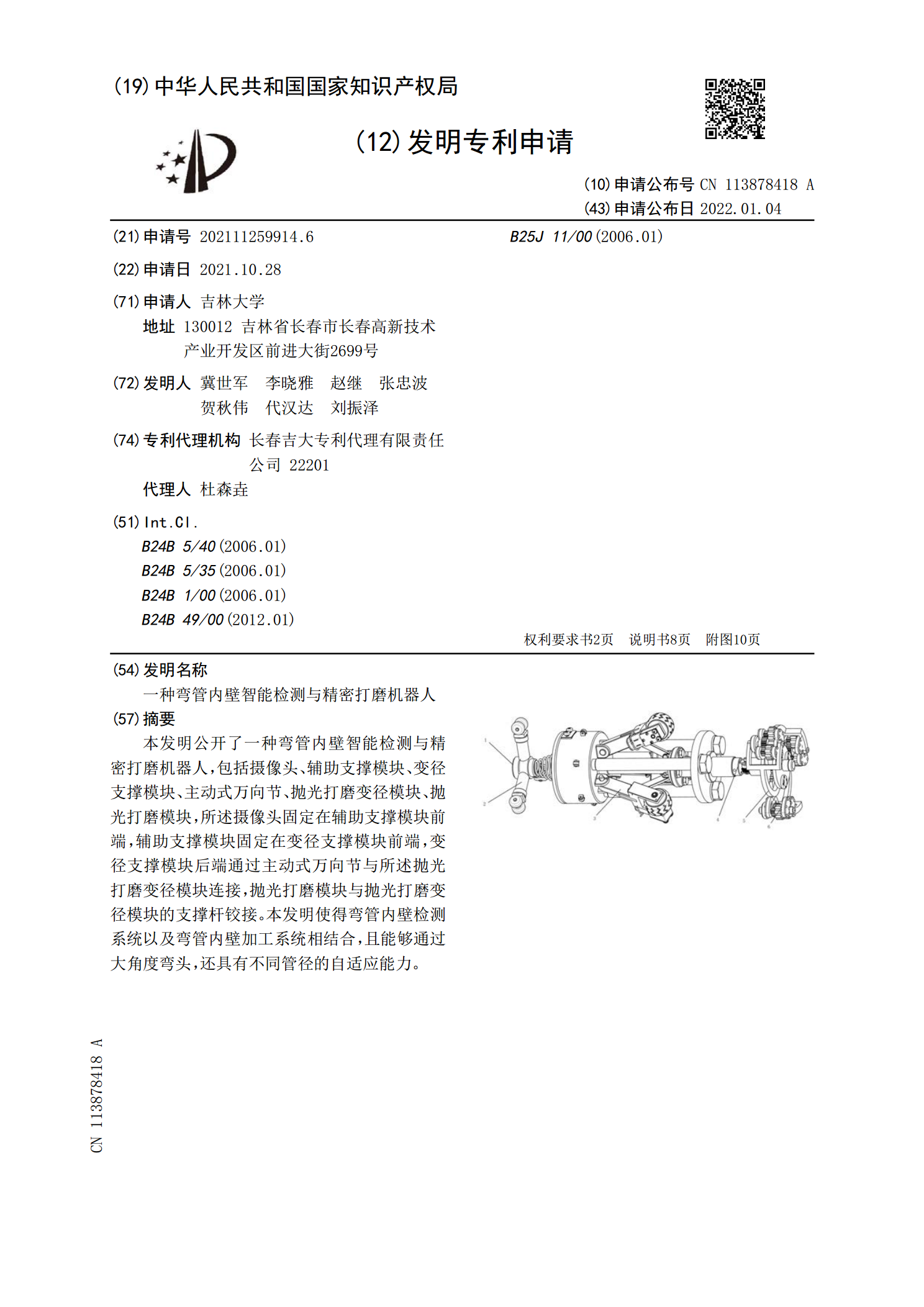
本发明公开了一种弯管内壁智能检测与精密打磨机器人,包括摄像头、辅助支撑模块、变径支撑模块、主动式万向节、抛光打磨变径模块、抛光打磨模块,所述摄像头固定在辅助支撑模块前端,辅助支撑模块固定在变径支撑模块前端,变径支撑模块后端通过主动式万向节与所述抛光打磨变径模块连接,抛光打磨模块与抛光打磨变径模块的支撑杆铰接。本发明使得弯管内壁检测系统以及弯管内壁加工系统相结合,且能够通过大角度弯头,还具有不同管径的自适应能力。
可快速实现弯管件内壁打磨的平整机构.pdf
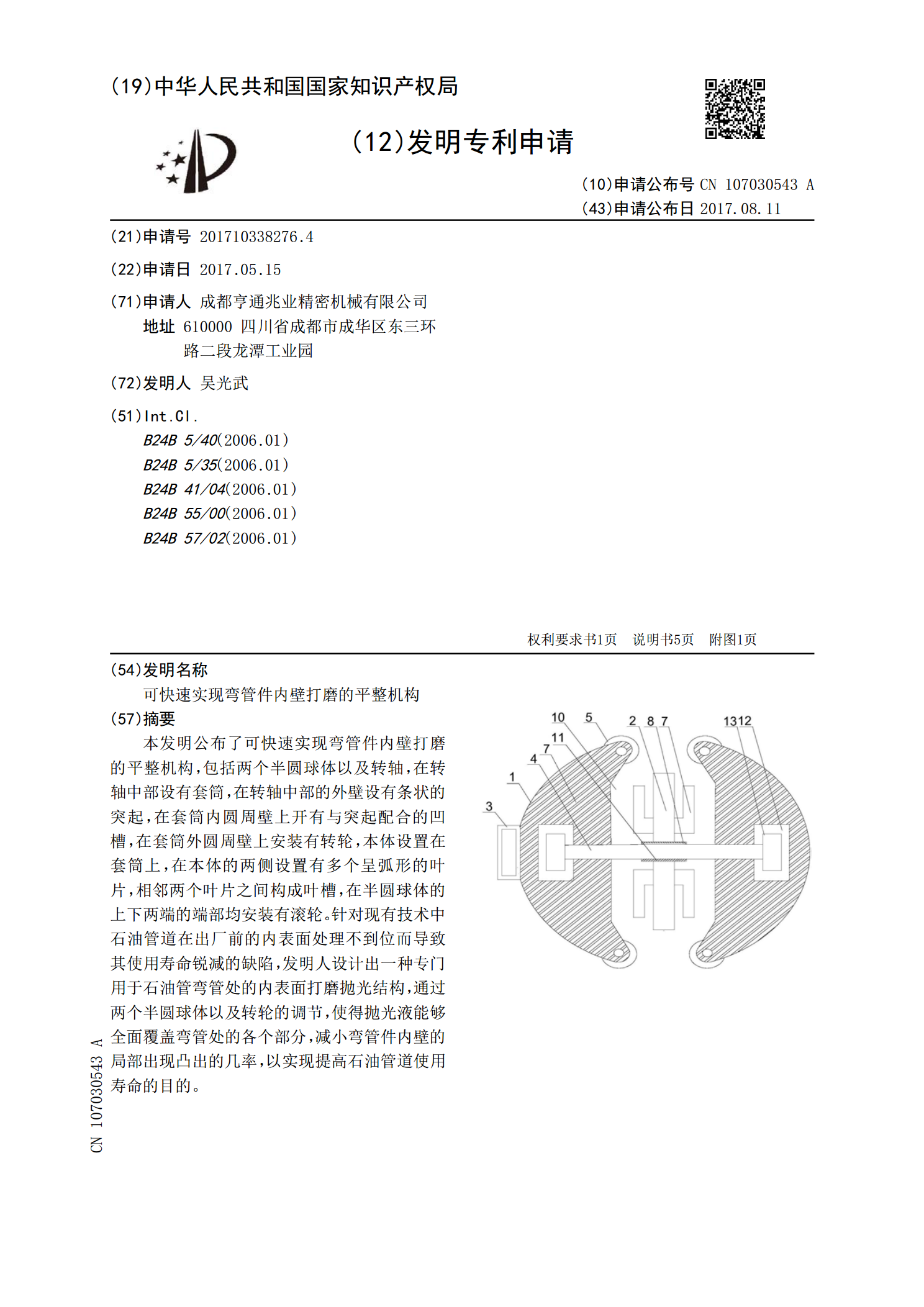
本发明公布了可快速实现弯管件内壁打磨的平整机构,包括两个半圆球体以及转轴,在转轴中部设有套筒,在转轴中部的外壁设有条状的突起,在套筒内圆周壁上开有与突起配合的凹槽,在套筒外圆周壁上安装有转轮,本体设置在套筒上,在本体的两侧设置有多个呈弧形的叶片,相邻两个叶片之间构成叶槽,在半圆球体的上下两端的端部均安装有滚轮。针对现有技术中石油管道在出厂前的内表面处理不到位而导致其使用寿命锐减的缺陷,发明人设计出一种专门用于石油管弯管处的内表面打磨抛光结构,通过两个半圆球体以及转轮的调节,使得抛光液能够全面覆盖弯管处的各
一种铸造管件内壁打磨装置.pdf
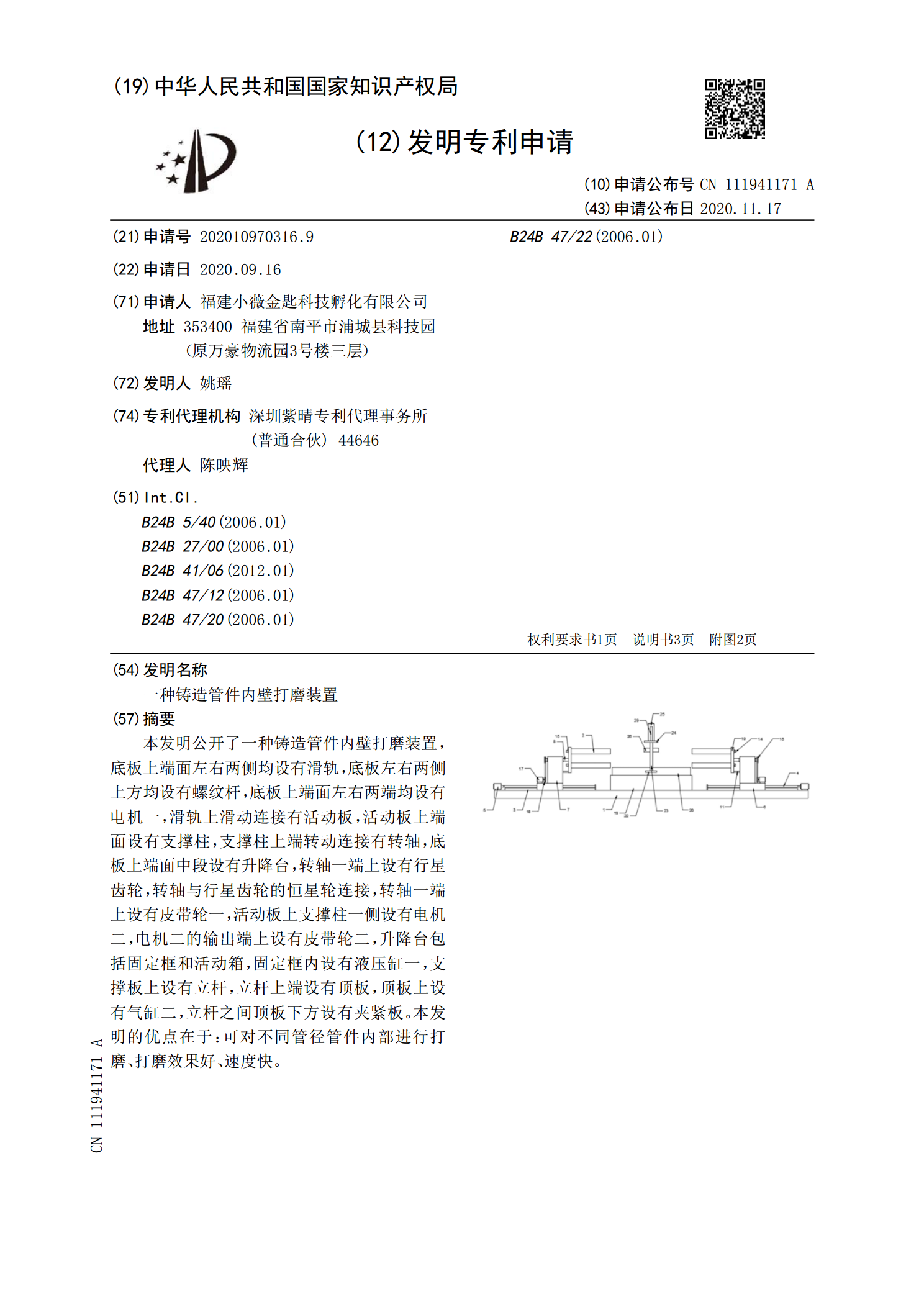
本发明公开了一种铸造管件内壁打磨装置,底板上端面左右两侧均设有滑轨,底板左右两侧上方均设有螺纹杆,底板上端面左右两端均设有电机一,滑轨上滑动连接有活动板,活动板上端面设有支撑柱,支撑柱上端转动连接有转轴,底板上端面中段设有升降台,转轴一端上设有行星齿轮,转轴与行星齿轮的恒星轮连接,转轴一端上设有皮带轮一,活动板上支撑柱一侧设有电机二,电机二的输出端上设有皮带轮二,升降台包括固定框和活动箱,固定框内设有液压缸一,支撑板上设有立杆,立杆上端设有顶板,顶板上设有气缸二,立杆之间顶板下方设有夹紧板。本发明的优点在

一种管件内壁打磨机.pdf
本发明公开了一种管件内壁打磨机,属于管件打磨设备技术领域,该管件内壁打磨机包括外旋转支架、内支撑架、电机和钻头;外旋转支架包括通过转轴连接的第一支架和第二支架,第一支架和第二支架上均设有第一磁铁和第一滚珠;内支撑架上设有支脚、第一支撑架和第二支撑架,第一支撑架和第二支撑架上均设有第二滚珠和第二磁铁,第一磁铁和第二磁铁相对设置且通过磁力连接,电机设置于第一支撑架和第二支撑架之间,钻头与电机连接;支脚的底部设有万向轮,所述支脚的长度可调节。该管件内壁打磨机,通过手持外旋转支架的转轴,即可控制内支撑架在管件中的

一种管件内壁打磨磨床.pdf
本发明公开了一种管件内壁打磨磨床,夹具安装在基座用于夹持待打磨管件,第一驱动轮和第二驱动轮转动安装在基座上,第一驱动轮周向均匀设有多个第一凹槽,第二驱动轮周向均匀设有多个第二凹槽,第一驱动机构用于驱动第一驱动轮和/或第二驱动轮转动,传动带配合在第一驱动轮和第二驱动轮上,多个打磨盘固定在传动带上并沿传动带长度方向等间隔设置,打磨状态下,第一驱动轮和第二驱动轮带动传动带连续转动,传动带上的多个打磨盘循环连续通过管件内部,打磨盘在管件内部移动过程中与管件内壁摩擦,从而起到对管件内壁打磨的作用;可见本发明提出的打