
一种基于多源信息融合的智能场景感知防御装置与方法.pdf

俊英****22

1/10

2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多源信息融合的智能场景感知防御装置与方法.pdf
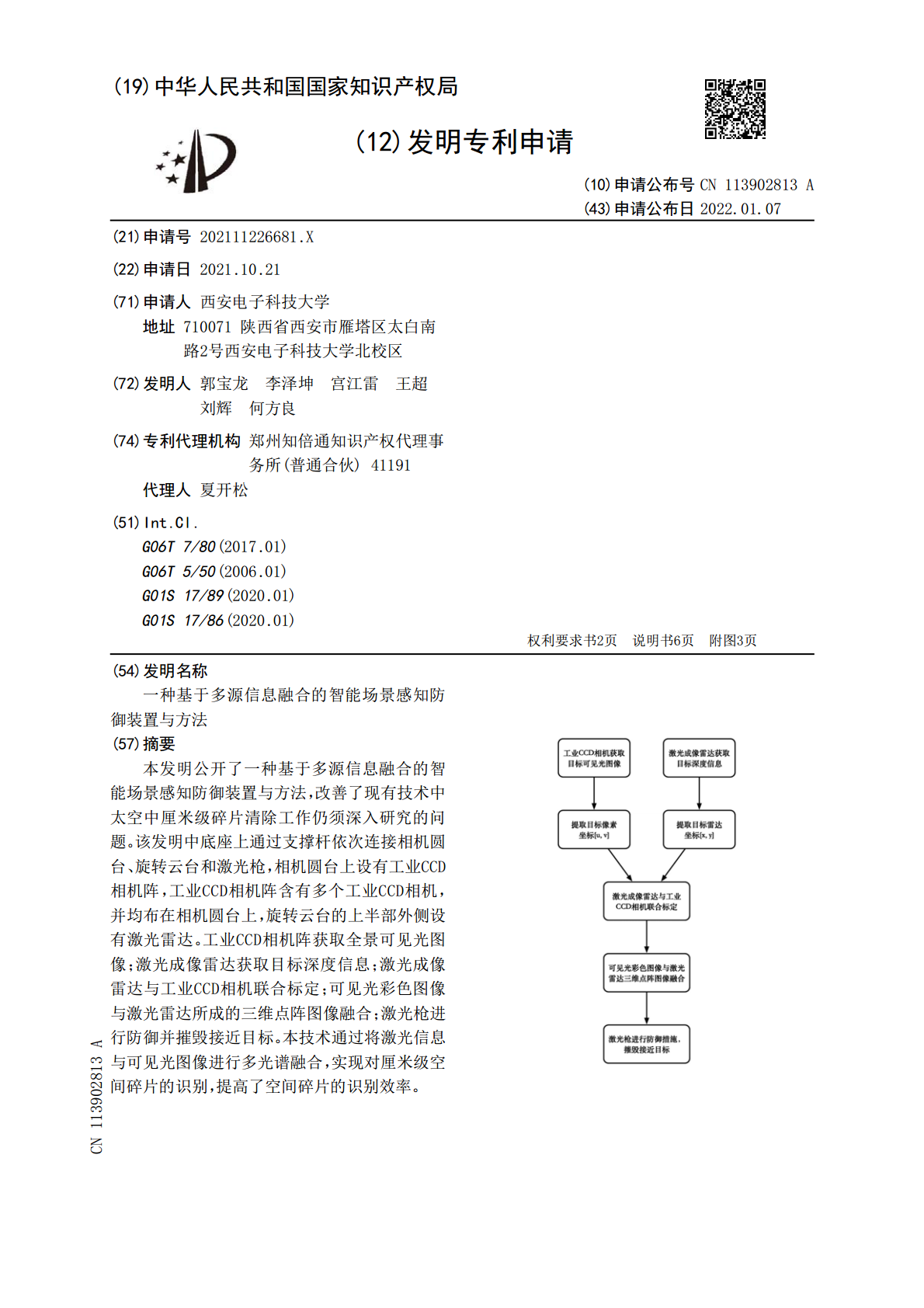
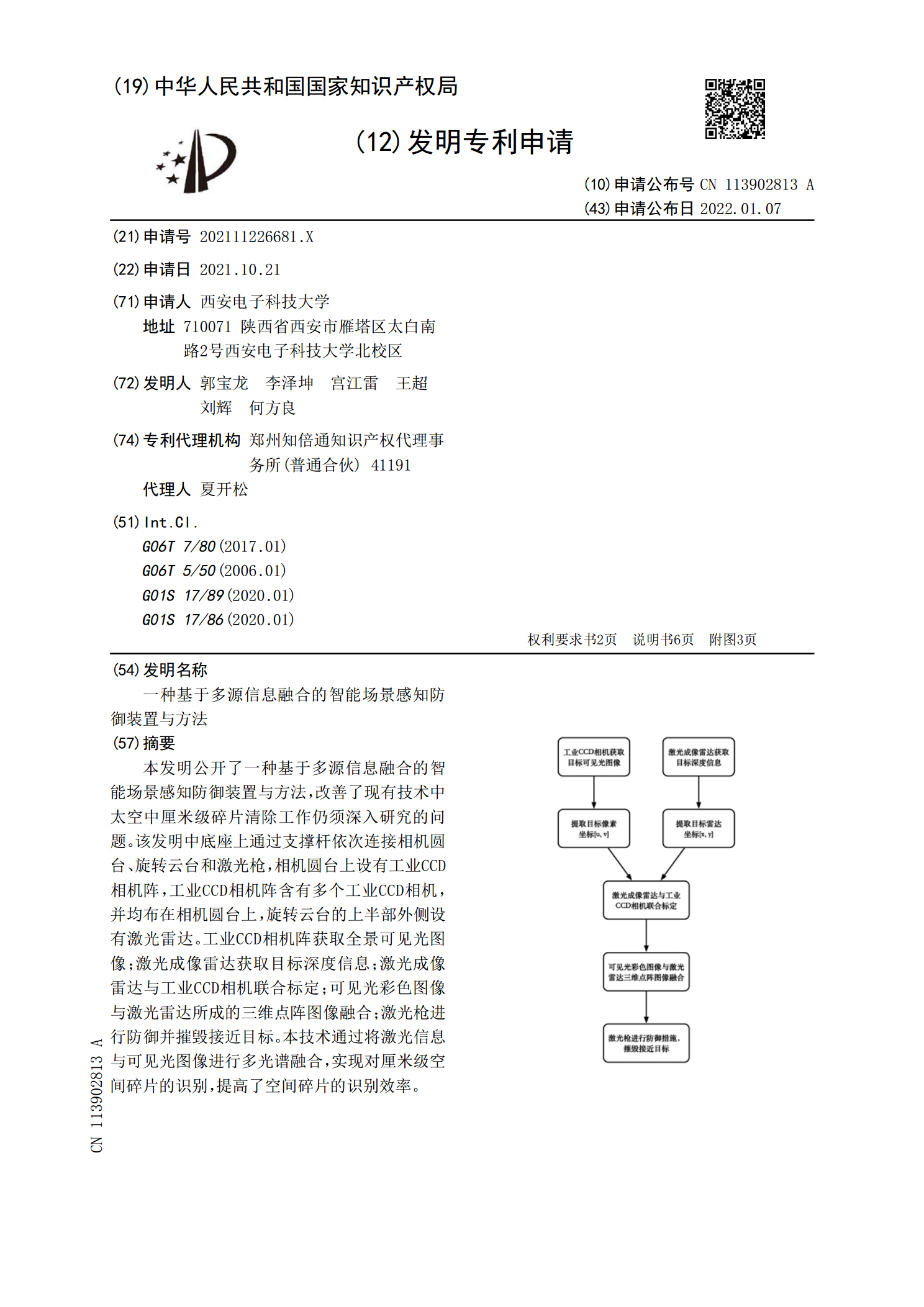
本发明公开了一种基于多源信息融合的智能场景感知防御装置与方法,改善了现有技术中太空中厘米级碎片清除工作仍须深入研究的问题。该发明中底座上通过支撑杆依次连接相机圆台、旋转云台和激光枪,相机圆台上设有工业CCD相机阵,工业CCD相机阵含有多个工业CCD相机,并均布在相机圆台上,旋转云台的上半部外侧设有激光雷达。工业CCD相机阵获取全景可见光图像;激光成像雷达获取目标深度信息;激光成像雷达与工业CCD相机联合标定;可见光彩色图像与激光雷达所成的三维点阵图像融合;激光枪进行防御并摧毁接近目标。本技术通过将激光信息
一种多感知源信息融合视频方法.pdf
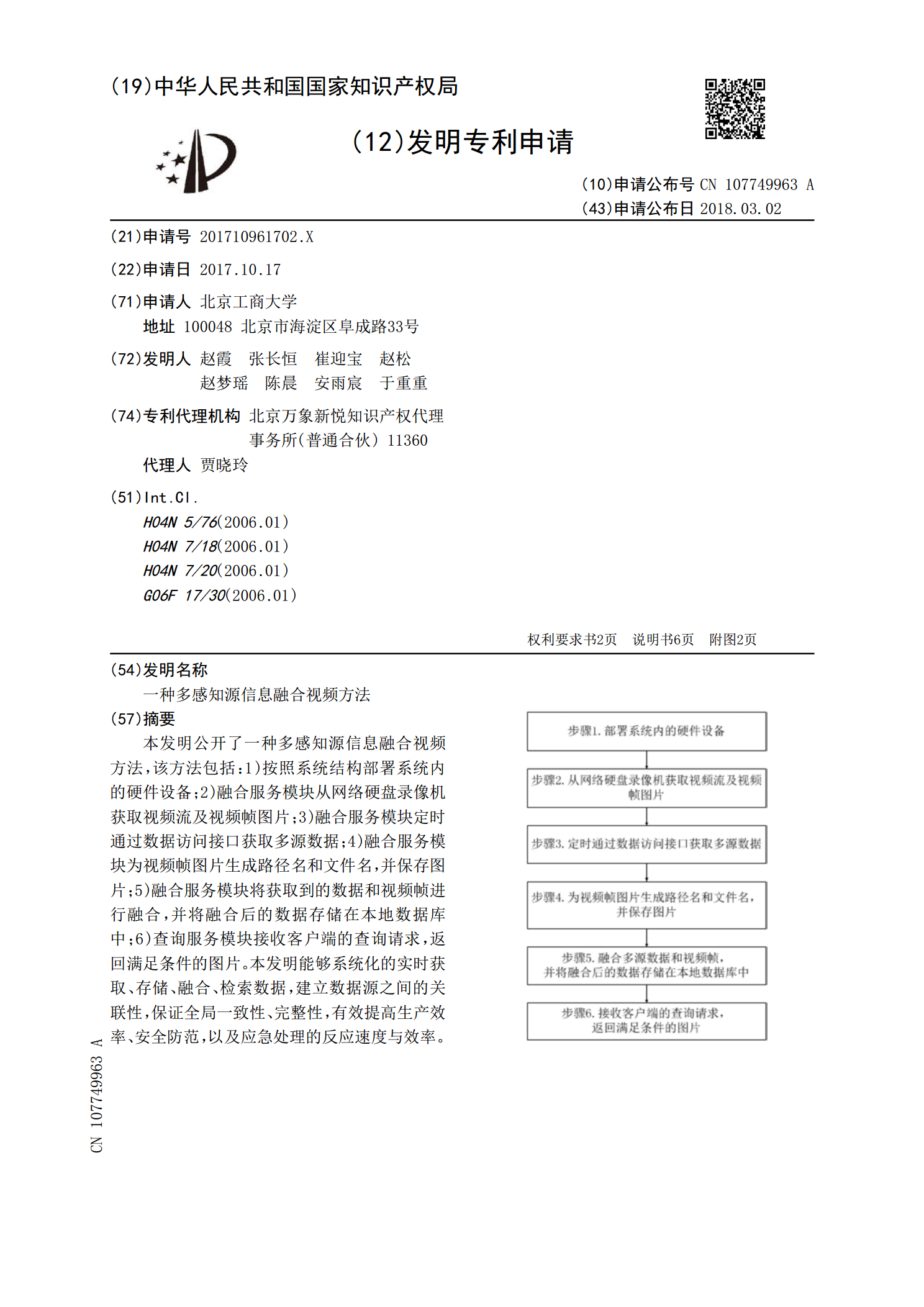
本发明公开了一种多感知源信息融合视频方法,该方法包括:1)按照系统结构部署系统内的硬件设备;2)融合服务模块从网络硬盘录像机获取视频流及视频帧图片;3)融合服务模块定时通过数据访问接口获取多源数据;4)融合服务模块为视频帧图片生成路径名和文件名,并保存图片;5)融合服务模块将获取到的数据和视频帧进行融合,并将融合后的数据存储在本地数据库中;6)查询服务模块接收客户端的查询请求,返回满足条件的图片。本发明能够系统化的实时获取、存储、融合、检索数据,建立数据源之间的关联性,保证全局一致性、完整性,有效提高生产

面向多源信息融合的智能汽车容错感知方法研究.docx
面向多源信息融合的智能汽车容错感知方法研究面向多源信息融合的智能汽车容错感知方法研究摘要:随着智能汽车技术的不断发展,人们对于智能汽车的安全性和容错性提出了更高的要求。针对传统的汽车感知系统在面对复杂环境时容易产生错误判断和信息不准确等问题,本论文提出一种基于多源信息融合的智能汽车容错感知方法。关键词:智能汽车;容错感知;多源信息融合引言智能汽车作为一种新型交通工具,以其自动化、智能化的特点受到了广泛关注。而在实际应用中,智能汽车面临着各种各样的挑战,其中之一就是感知系统的容错性。传统的汽车感知系统往往只
一种基于多源信息融合的智能故障诊断方法.pdf
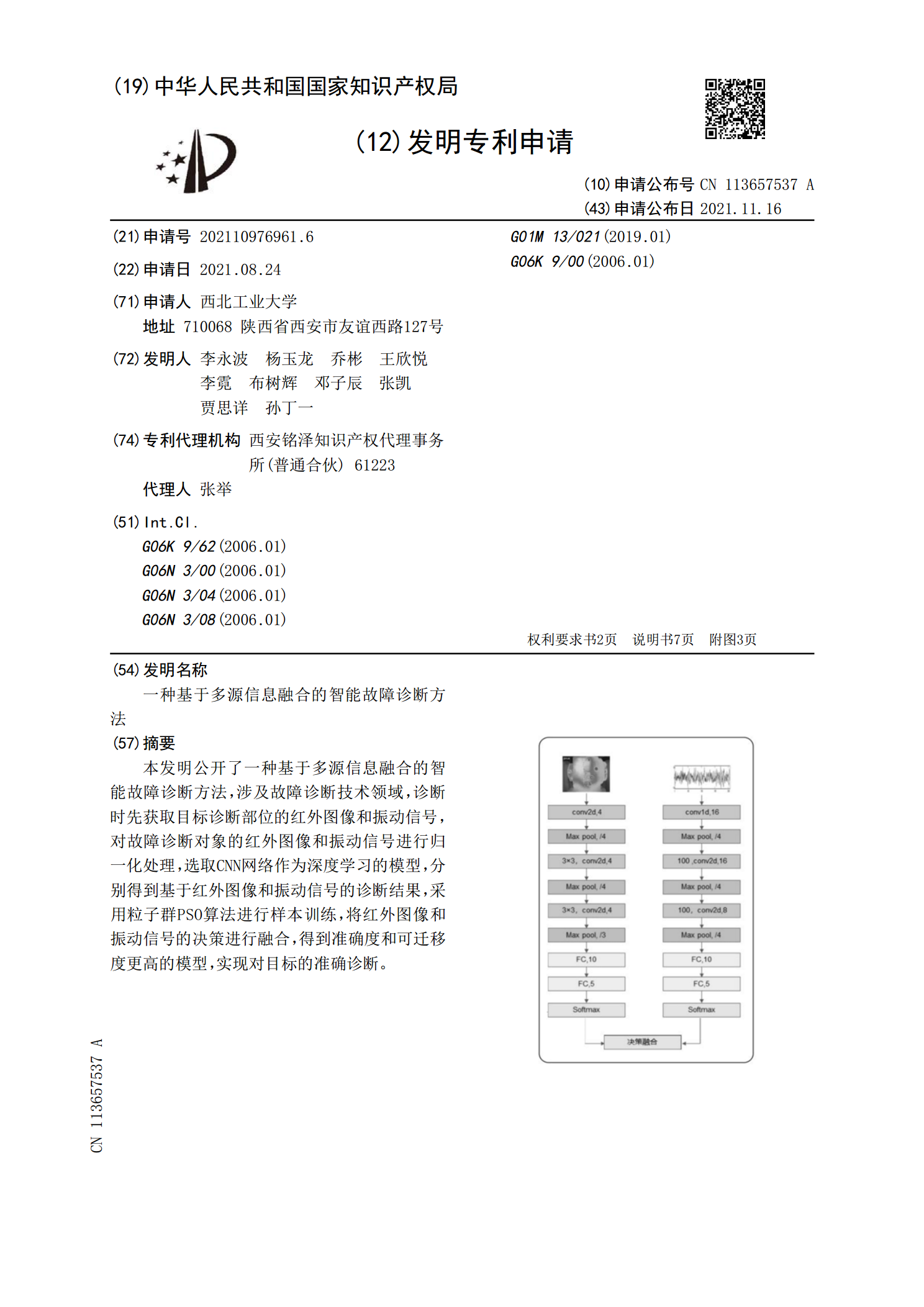
本发明公开了一种基于多源信息融合的智能故障诊断方法,涉及故障诊断技术领域,诊断时先获取目标诊断部位的红外图像和振动信号,对故障诊断对象的红外图像和振动信号进行归一化处理,选取CNN网络作为深度学习的模型,分别得到基于红外图像和振动信号的诊断结果,采用粒子群PSO算法进行样本训练,将红外图像和振动信号的决策进行融合,得到准确度和可迁移度更高的模型,实现对目标的准确诊断。

一种多融合感知边缘智能装置.pdf
一种多融合感知边缘智能装置,包括箱体,所述箱体的顶部铰接有箱体盖,所述箱体盖内填充有硬质泡棉,所述硬质泡棉内放置有天线,所述箱体的内部设有上面板,所述上面板的两侧分别设有端口面板和后盖板,所述上面板的底部设有底板,所述上面板的表面内嵌有设备开关,所述上面板的表面安装有WiFi天线、LoRa天线、北斗接口和显示屏幕,所述上面板的表面开设有PDA槽位,所述端口面板的表面内腔内嵌有DC电源接口、HDMI接口、RS接口、接口、RJ网络口和USB接口,所述箱体的正面内嵌有通气阀,所述底板的顶部设有算力核心模块,所述