
一种扳动扳手自动开合的伞.pdf

是你****深呀

1/10
2/10
3/10
4/10
5/10
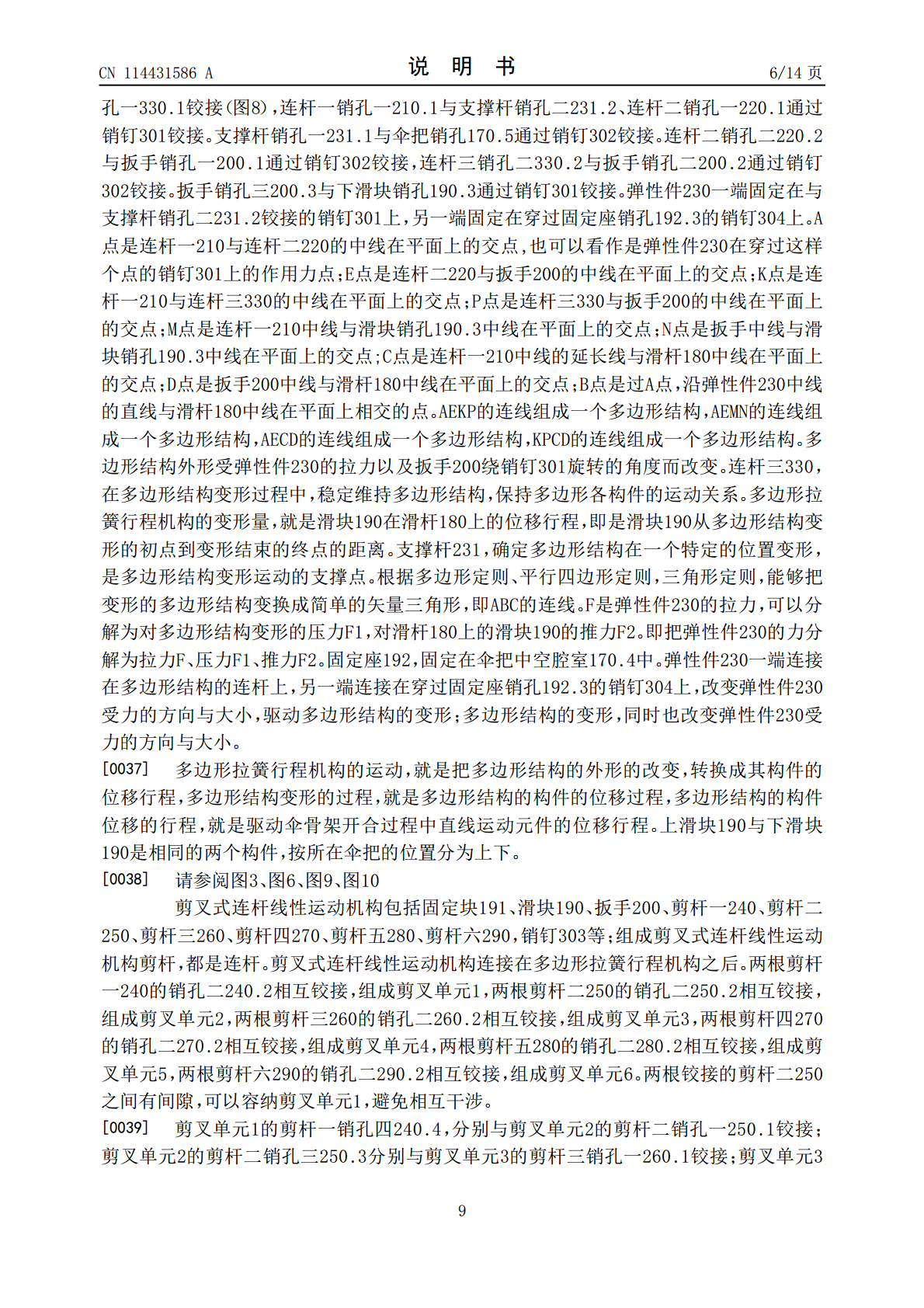
6/10
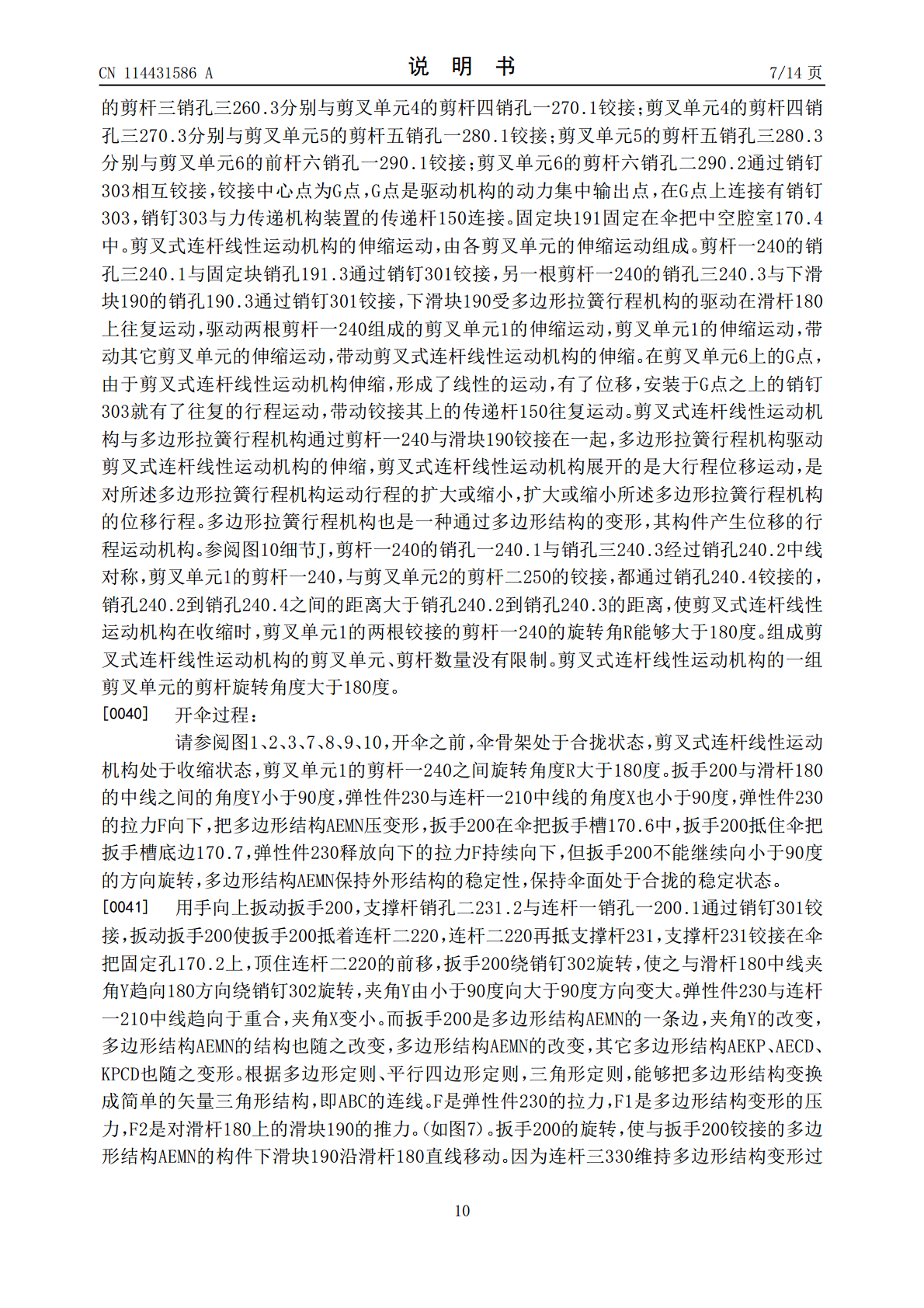
7/10
8/10
9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种扳动扳手自动开合的伞.pdf
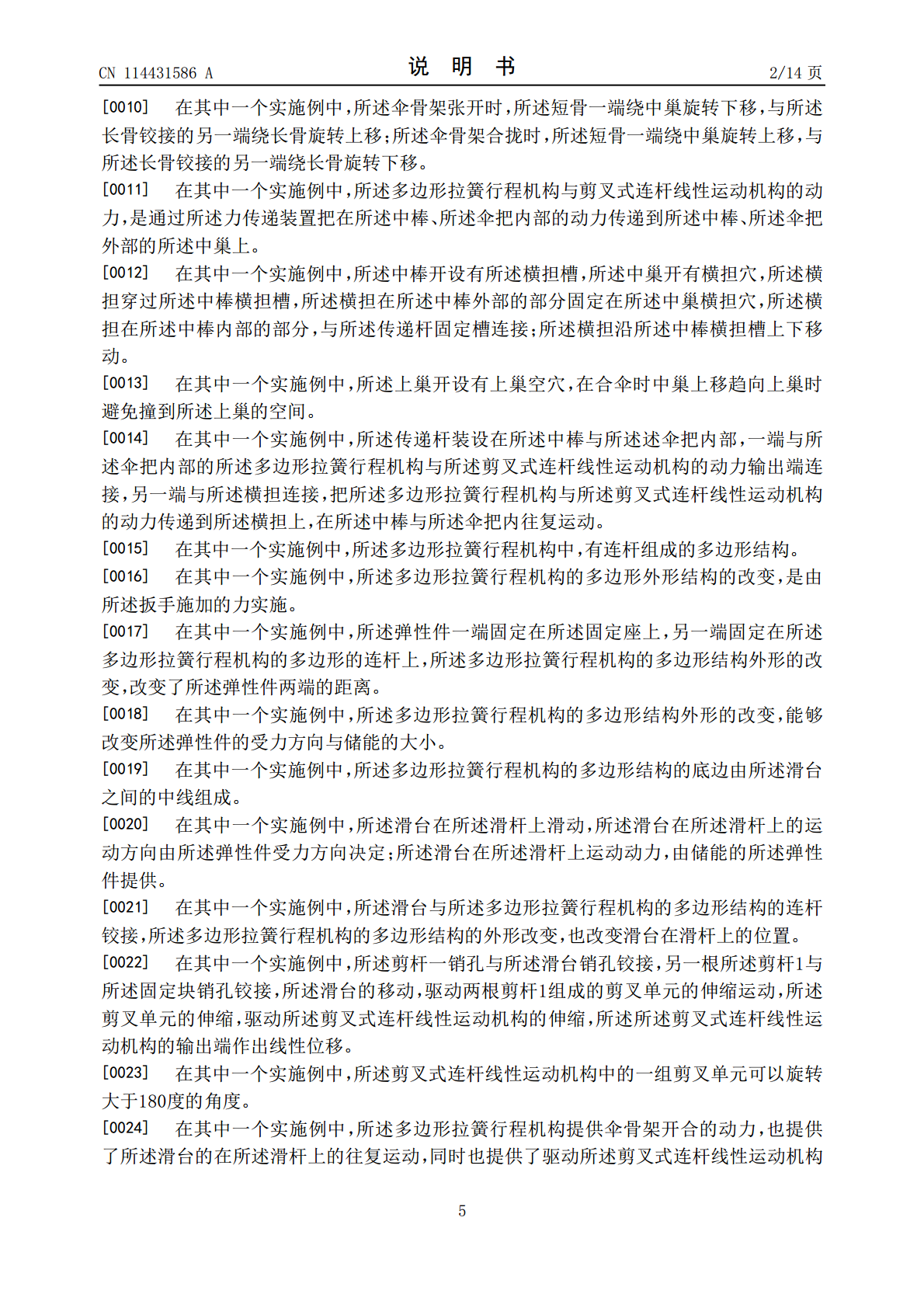
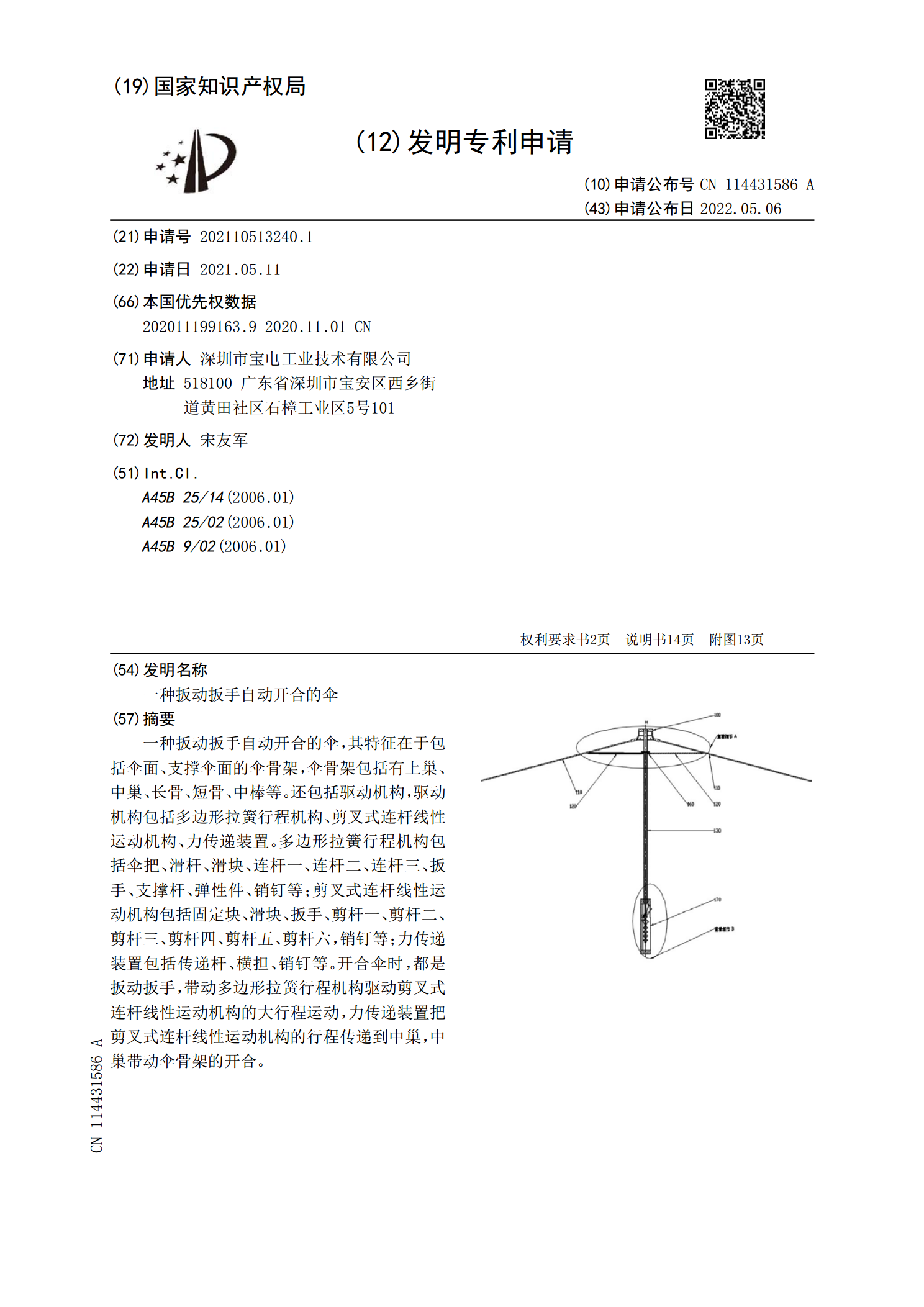
一种扳动扳手自动开合的伞,其特征在于包括伞面、支撑伞面的伞骨架,伞骨架包括有上巢、中巢、长骨、短骨、中棒等。还包括驱动机构,驱动机构包括多边形拉簧行程机构、剪叉式连杆线性运动机构、力传递装置。多边形拉簧行程机构包括伞把、滑杆、滑块、连杆一、连杆二、连杆三、扳手、支撑杆、弹性件、销钉等;剪叉式连杆线性运动机构包括固定块、滑块、扳手、剪杆一、剪杆二、剪杆三、剪杆四、剪杆五、剪杆六,销钉等;力传递装置包括传递杆、横担、销钉等。开合伞时,都是扳动扳手,带动多边形拉簧行程机构驱动剪叉式连杆线性运动机构的大行程运动,

一种自动开合伞.pdf
本发明涉及一种自动开合伞,包括伸缩式的伞中棒和可开合的伞骨装置,其还包括设于伞头内的单向转动装置,其包括棘轮和滑块,该棘轮的转轴绕设有一绳索,该棘轮连接有发条,棘轮反向转动时使该发条上紧,而发条松开时则驱动棘轮正转;该滑块可上下滑动地设置在伞头内,并上端供与扣头底部相抵触,该滑块还突出形成有供与棘轮相配合而实现单向转动的突爪,该伞头内还设置有用于驱动滑块向上运动而使突爪与棘轮相配合的滑块弹簧。与现有技术相比,本发明具有结构简单、加工容易以及组装便利的特点;同时本发明中滑块采用滑动的方式,故在确保与棘轮之间
一种自动开合电饭煲.pdf
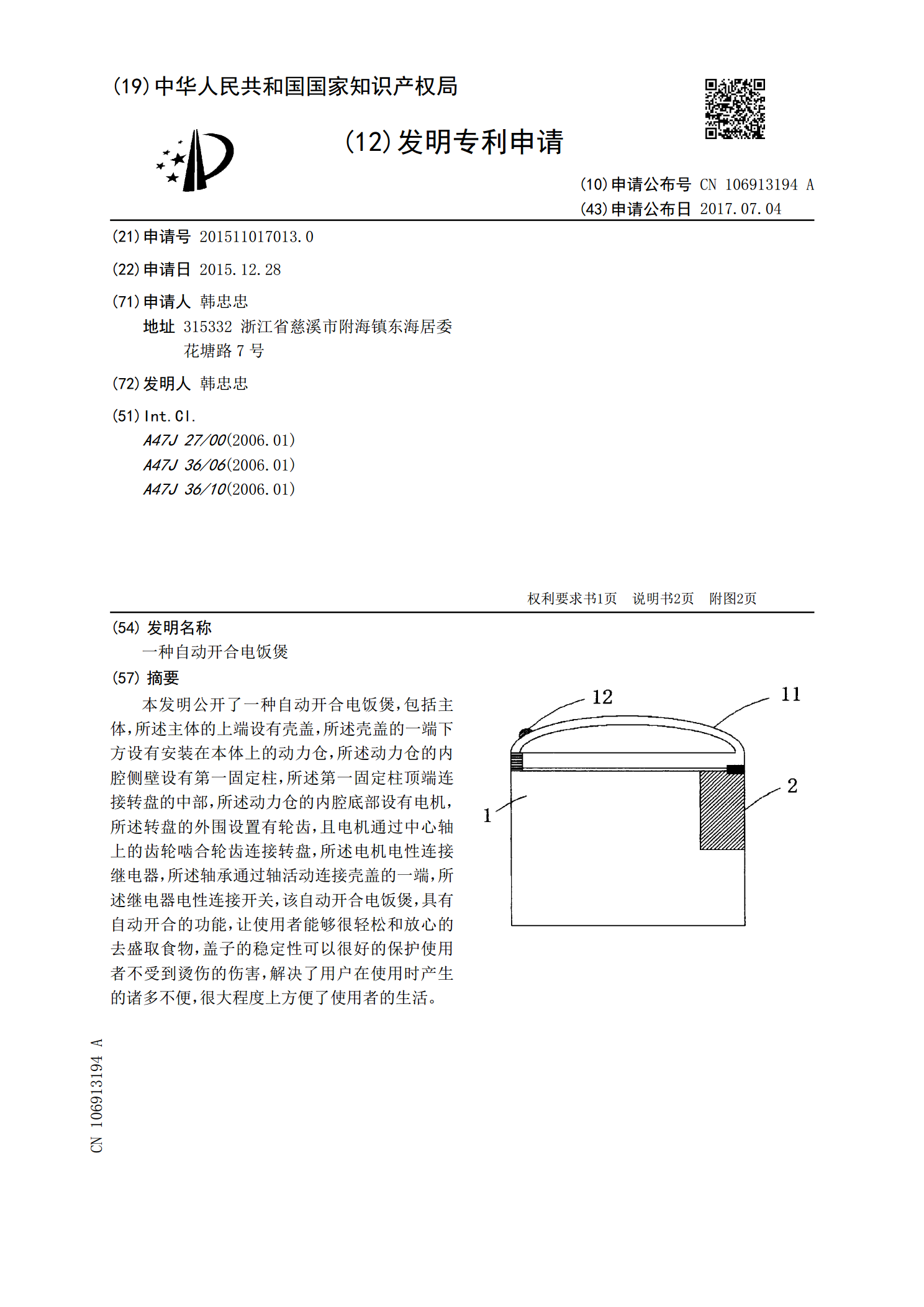
本发明公开了一种自动开合电饭煲,包括主体,所述主体的上端设有壳盖,所述壳盖的一端下方设有安装在本体上的动力仓,所述动力仓的内腔侧壁设有第一固定柱,所述第一固定柱顶端连接转盘的中部,所述动力仓的内腔底部设有电机,所述转盘的外围设置有轮齿,且电机通过中心轴上的齿轮啮合轮齿连接转盘,所述电机电性连接继电器,所述轴承通过轴活动连接壳盖的一端,所述继电器电性连接开关,该自动开合电饭煲,具有自动开合的功能,让使用者能够很轻松和放心的去盛取食物,盖子的稳定性可以很好的保护使用者不受到烫伤的伤害,解决了用户在使用时产生的
一种自动开合抽屉.pdf
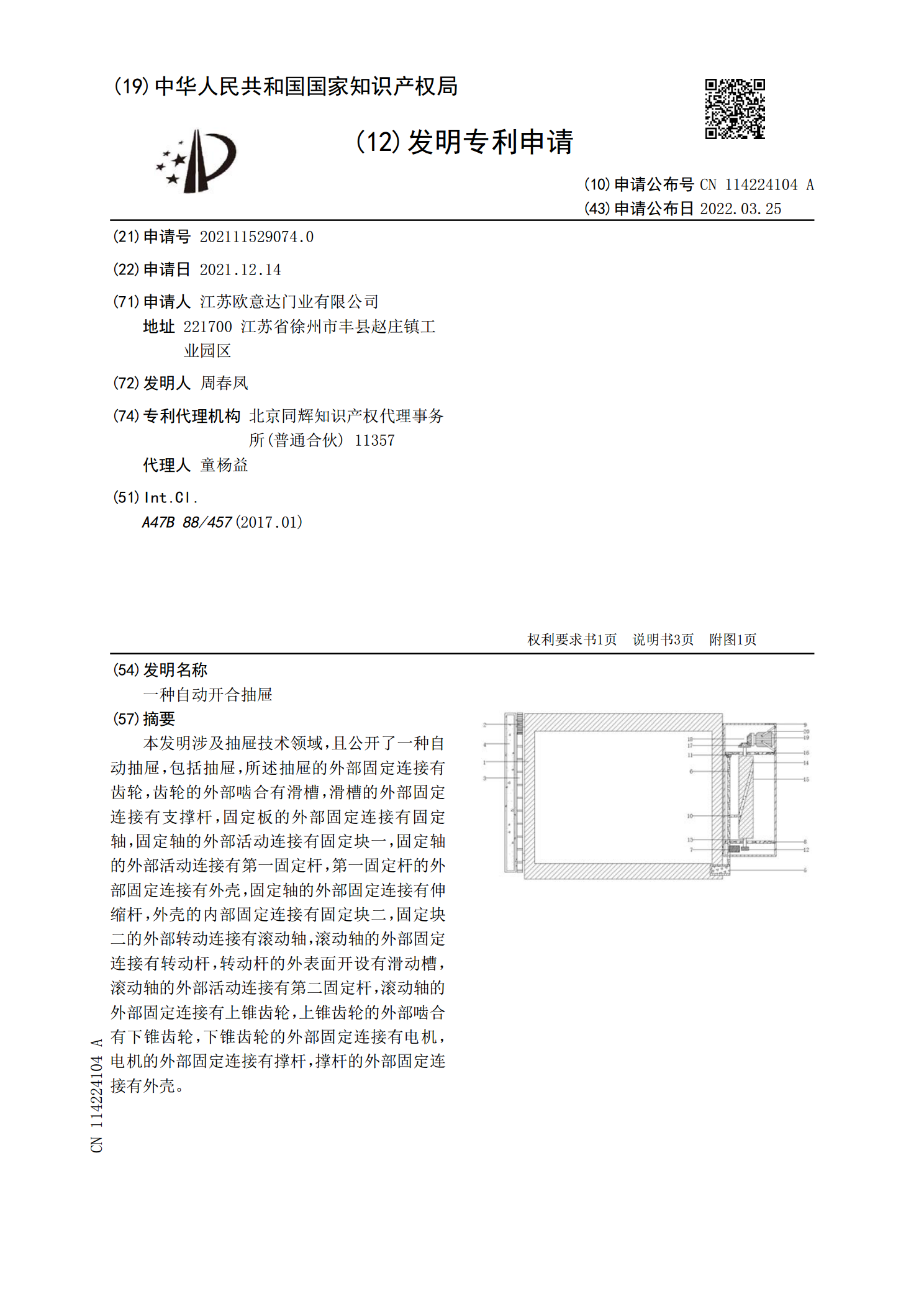
本发明涉及抽屉技术领域,且公开了一种自动抽屉,包括抽屉,所述抽屉的外部固定连接有齿轮,齿轮的外部啮合有滑槽,滑槽的外部固定连接有支撑杆,固定板的外部固定连接有固定轴,固定轴的外部活动连接有固定块一,固定轴的外部活动连接有第一固定杆,第一固定杆的外部固定连接有外壳,固定轴的外部固定连接有伸缩杆,外壳的内部固定连接有固定块二,固定块二的外部转动连接有滚动轴,滚动轴的外部固定连接有转动杆,转动杆的外表面开设有滑动槽,滚动轴的外部活动连接有第二固定杆,滚动轴的外部固定连接有上锥齿轮,上锥齿轮的外部啮合有下锥齿轮,
全自动开收伞.pdf
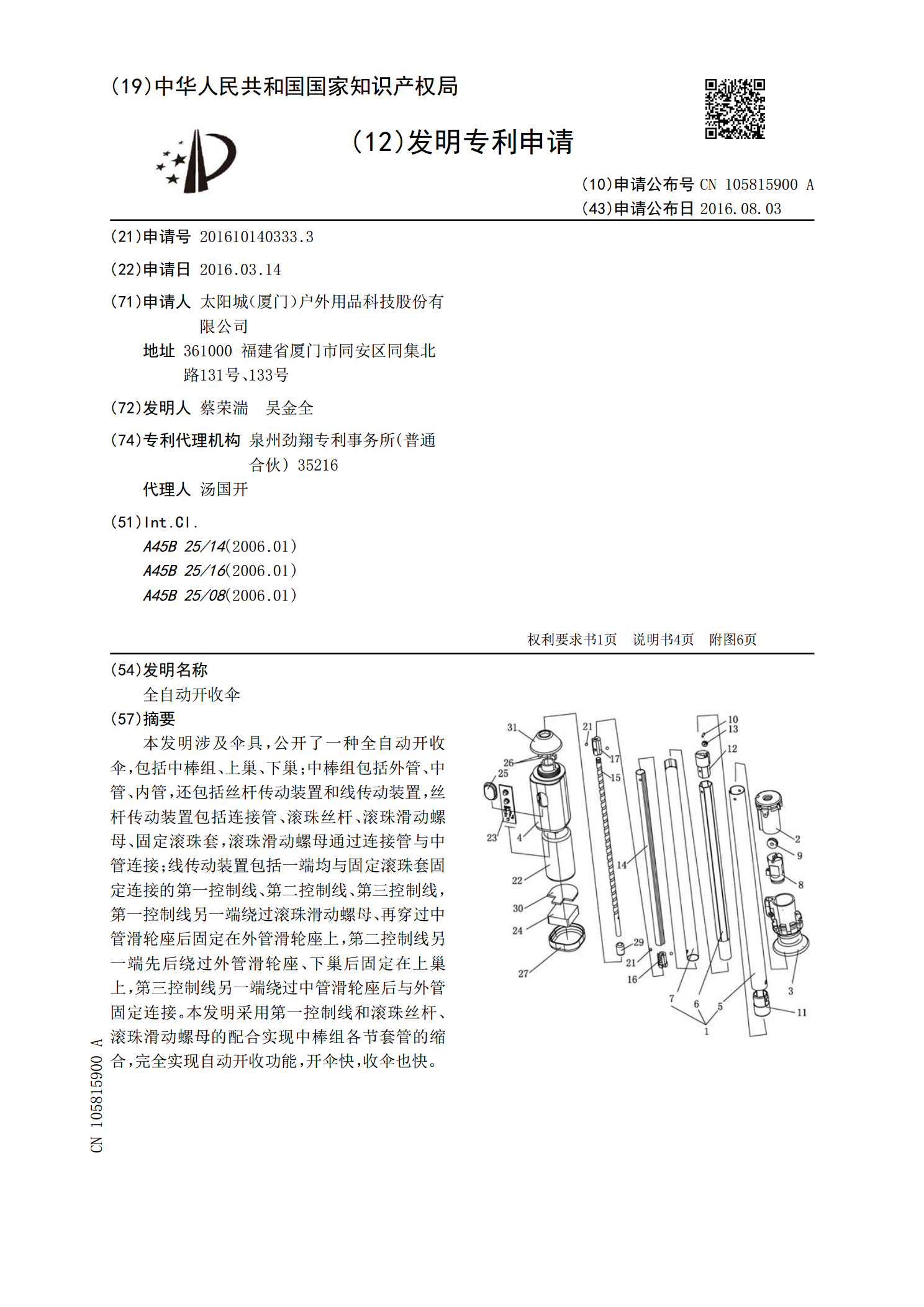
本发明涉及伞具,公开了一种全自动开收伞,包括中棒组、上巢、下巢;中棒组包括外管、中管、内管,还包括丝杆传动装置和线传动装置,丝杆传动装置包括连接管、滚珠丝杆、滚珠滑动螺母、固定滚珠套,滚珠滑动螺母通过连接管与中管连接;线传动装置包括一端均与固定滚珠套固定连接的第一控制线、第二控制线、第三控制线,第一控制线另一端绕过滚珠滑动螺母、再穿过中管滑轮座后固定在外管滑轮座上,第二控制线另一端先后绕过外管滑轮座、下巢后固定在上巢上,第三控制线另一端绕过中管滑轮座后与外管固定连接。本发明采用第一控制线和滚珠丝杆、滚珠滑