
探测装置和工程机械.pdf

美丽****ka


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
探测装置和工程机械.pdf
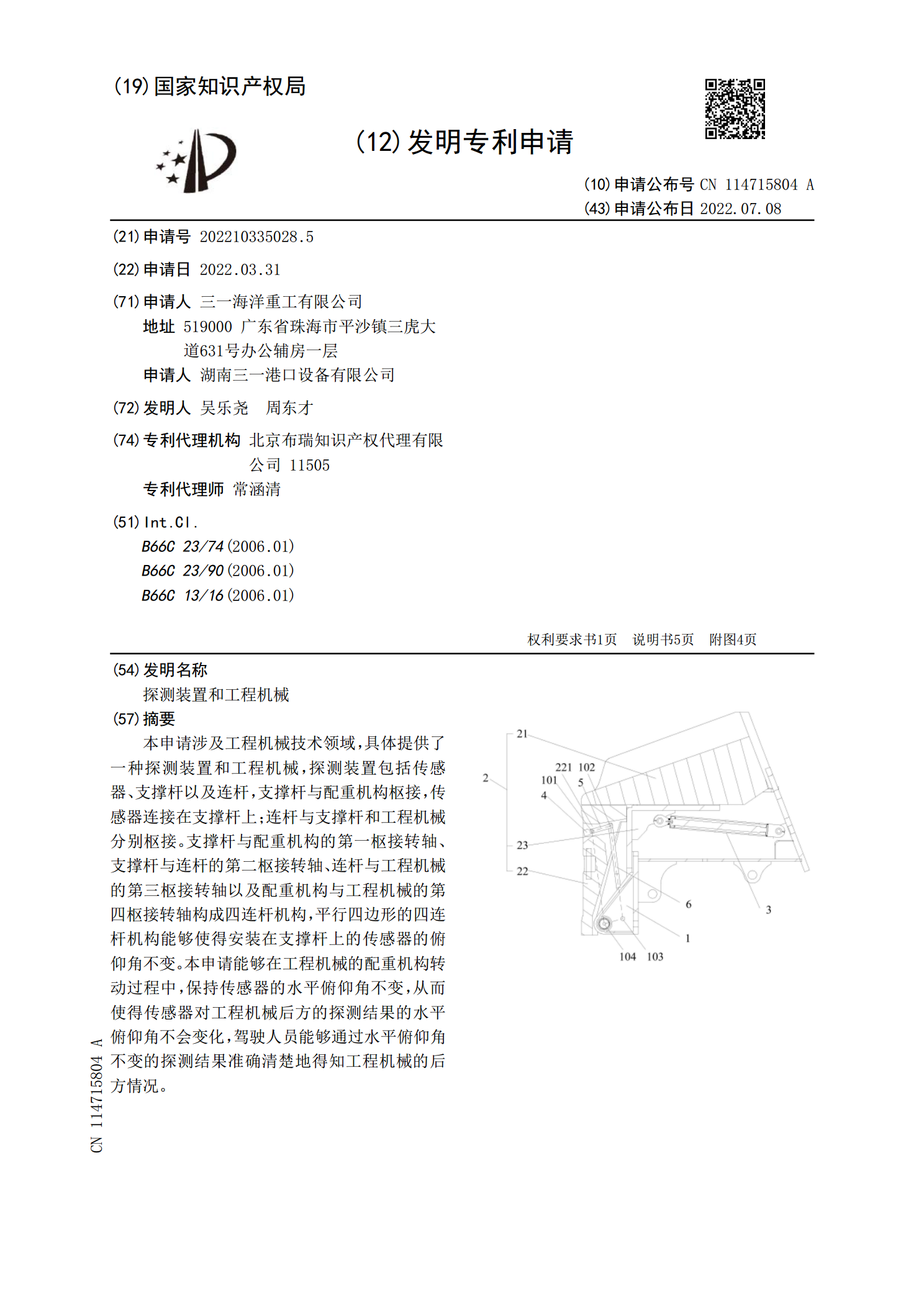
本申请涉及工程机械技术领域,具体提供了一种探测装置和工程机械,探测装置包括传感器、支撑杆以及连杆,支撑杆与配重机构枢接,传感器连接在支撑杆上;连杆与支撑杆和工程机械分别枢接。支撑杆与配重机构的第一枢接转轴、支撑杆与连杆的第二枢接转轴、连杆与工程机械的第三枢接转轴以及配重机构与工程机械的第四枢接转轴构成四连杆机构,平行四边形的四连杆机构能够使得安装在支撑杆上的传感器的俯仰角不变。本申请能够在工程机械的配重机构转动过程中,保持传感器的水平俯仰角不变,从而使得传感器对工程机械后方的探测结果的水平俯仰角不会变化,

微波探测方法和装置.pdf
本发明提供一种微波探测方法和装置,其中所述微波探测方法包括自所述微波探测装置的接收天线接入平衡差分信号形态的回波信号的步骤,则环境中的电磁干扰在所述回波信号中以共模干扰形态存在而能够在所述回波信号的传输过程中抑制环境干扰,以在后继,基于对平衡差分信号形态的所述回波信号和相应激励信号的混频处理输出平衡差分信号形态的多普勒中频信号,和对平衡差分信号形态的多普勒中频信号的差分转单端处理步骤对共模干扰的进一步抑制作用,输出免受环境电磁干扰的单端信号形态的所述多普勒中频信号,从而提高所述多普勒中频信号对与人体移动动

微波探测方法和装置.pdf
本发明提供一种微波探测方法和装置,其中所述微波探测方法包括自所述微波探测装置的接收天线接入平衡差分信号形态的回波信号的步骤,则环境中的电磁干扰在所述回波信号中以共模干扰形态存在而能够在所述回波信号的传输过程中抑制环境干扰,以在后继,基于对平衡差分信号形态的所述回波信号的差分转单端处理步骤对平衡差分信号形态的所述回波信号中的共模干扰的进一步抑制作用,输出免受环境电磁干扰的单端信号形态的所述回波信号,和基于对单端信号形态的所述回波信号的混频处理步骤输出多普勒中频信号,从而提高所述多普勒中频信号对与人体移动动作

调节装置和工程机械.pdf
本实用新型提出了一种调节装置和工程机械,属于工程机械技术领域,调节装置包括:导向盘,沿导向盘的周向间隔设有多个第一定位孔;绕线盘,相对于导向盘可转动地设置,绕线盘包括圆盘部和绕线轴,圆盘部设于绕线轴的一端,并位于导向盘的一侧,圆盘部的周向上间隔设有多个第二定位孔,第二定位孔到绕线轴转动轴线的距离等于第一定位孔到绕线轴转动轴线的距离。通过本申请的技术方案,可实现精细化的多级调节。
液面探测装置和方法以及探测模块.pdf
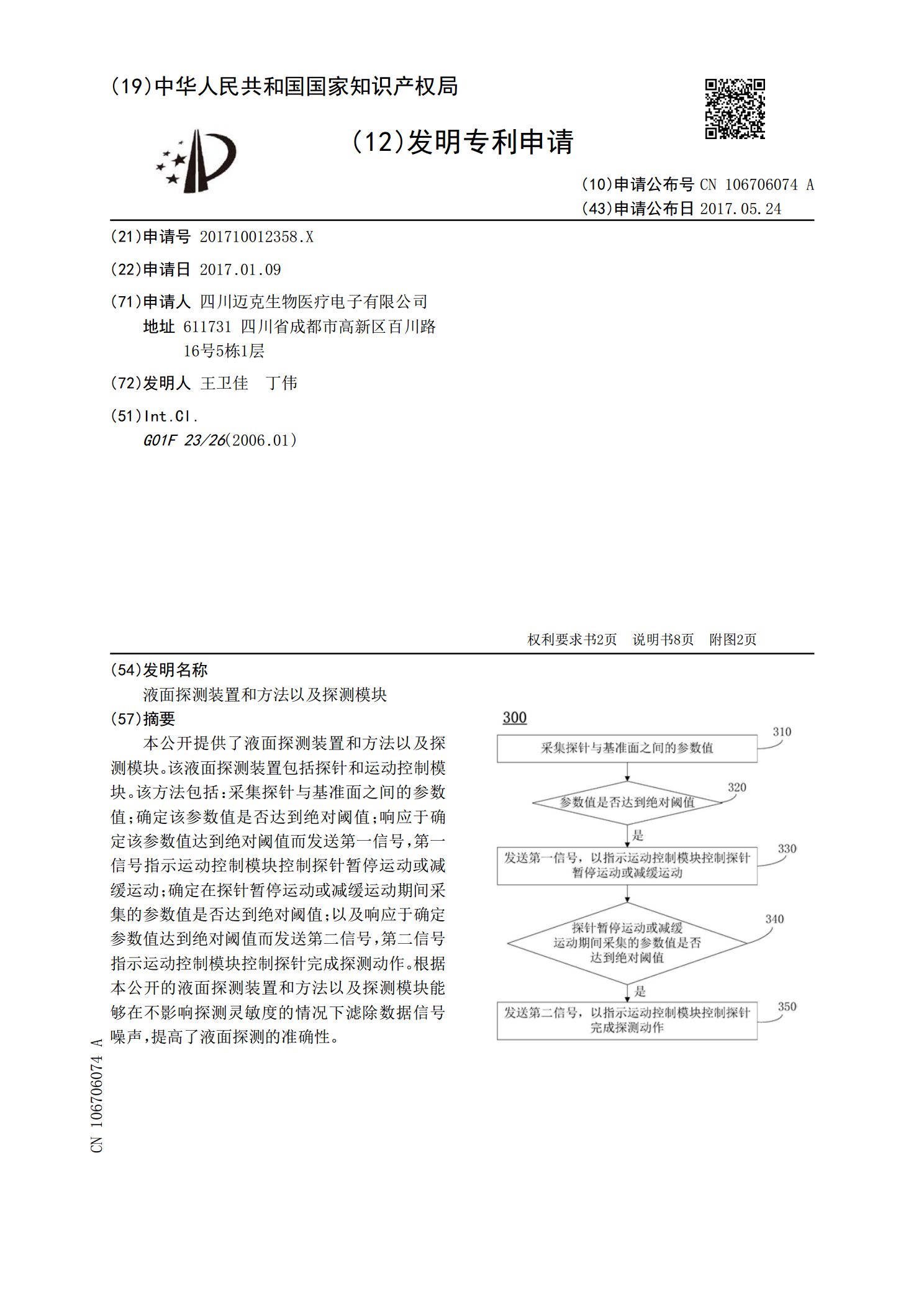
本公开提供了液面探测装置和方法以及探测模块。该液面探测装置包括探针和运动控制模块。该方法包括:采集探针与基准面之间的参数值;确定该参数值是否达到绝对阈值;响应于确定该参数值达到绝对阈值而发送第一信号,第一信号指示运动控制模块控制探针暂停运动或减缓运动;确定在探针暂停运动或减缓运动期间采集的参数值是否达到绝对阈值;以及响应于确定参数值达到绝对阈值而发送第二信号,第二信号指示运动控制模块控制探针完成探测动作。根据本公开的液面探测装置和方法以及探测模块能够在不影响探测灵敏度的情况下滤除数据信号噪声,提高了液面探