
平面机构的自由度计算.ppt

可爱****乐多

1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共86页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
平面机构的自由度计算.ppt
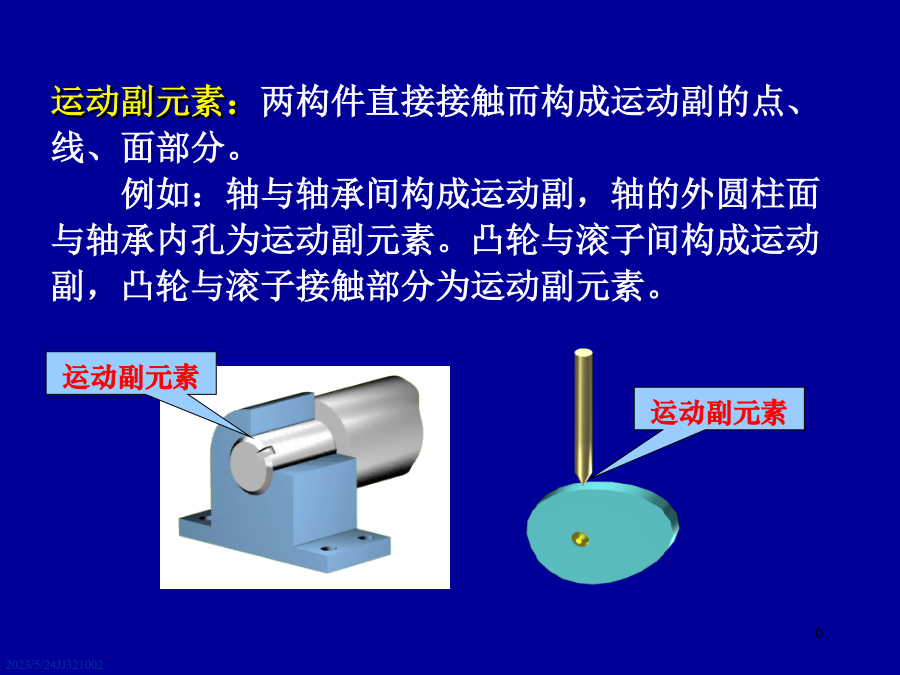
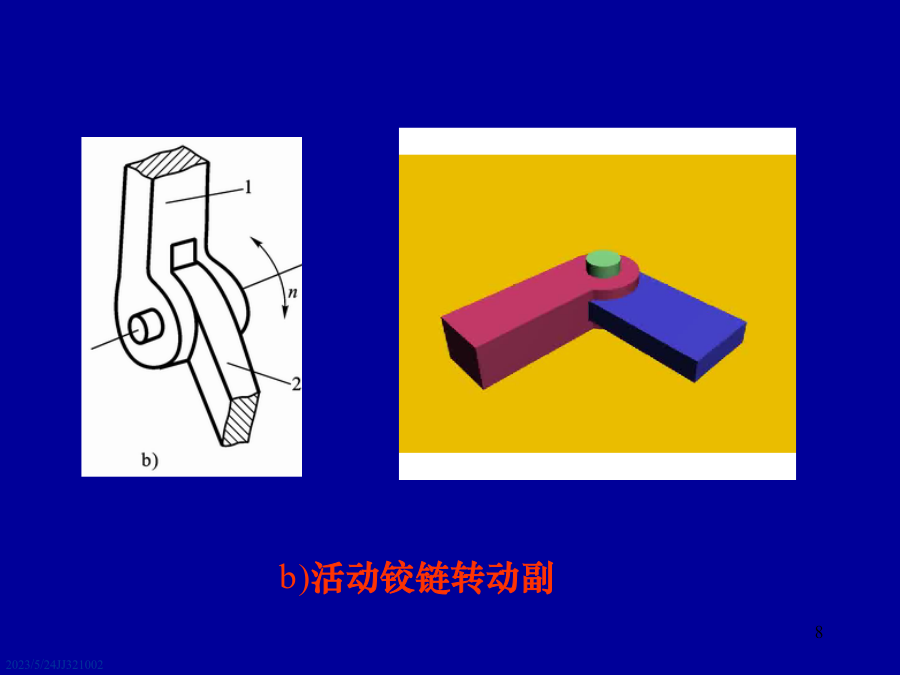
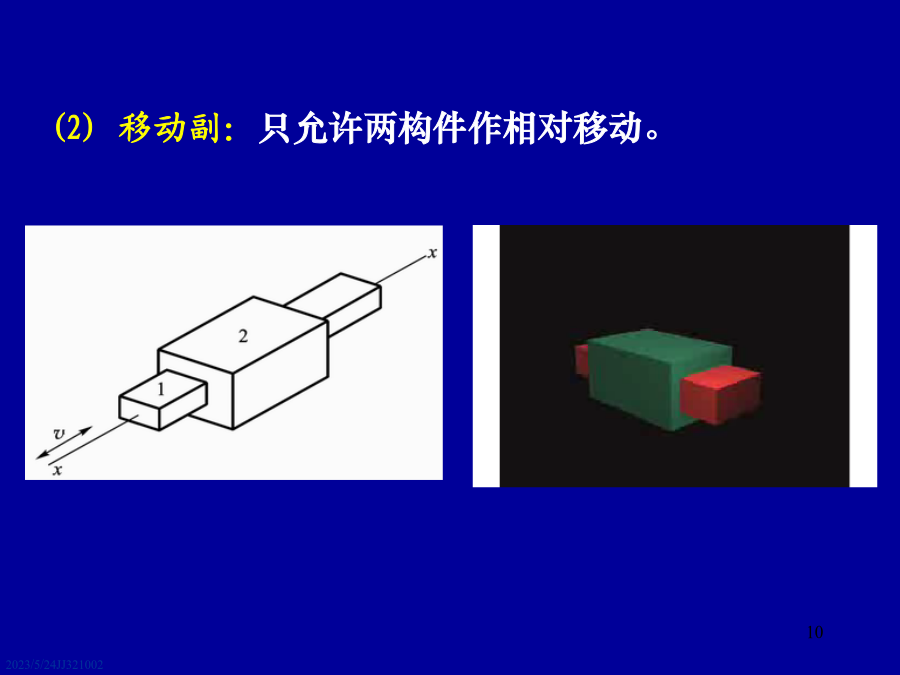
章平面机构的自由度计算§2-1运动副及其分类构件-独立的运动单元运动副元素:两构件直接接触而构成运动副的点、线、面部分。例如:轴与轴承间构成运动副,轴的外圆柱面与轴承内孔为运动副元素。凸轮与滚子间构成运动副,凸轮与滚子接触部分为运动副元素。b)活动铰链转动副固定铰链和活动铰链模型(2)移动副:只允许两构件作相对移动。移动副模型2.高副:两构件以点或线接触而构成的运动副。齿轮副高副模型(二)空间运动副§2.2平面机构的运动简图二、平面机构运动简图的绘制2.转动副3.移动副4.平面高副机架两个活动构件联接两副
平面机构的自由度计算.ppt
.......................................................................................

平面机构自由度的计算.ppt
自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002运动副元素:两构件直接接触而构成运动副的点、线、面部分。例如:轴与轴承间构成运动副,轴的外圆柱面与轴承内孔为运动副元素。凸轮与滚子间构成运动副,凸轮与滚子接触部分为运动副元素。1)按相对运动范围分有:平面运动副-平面运动(一)空间运动副自用盘编号JJ321002b)活动铰链转动副固定铰链和活动铰链模型(2)移动副:只允许两构件作相对移动。移动副模型2.高副:两构件以点或线接触而构成的运动副。齿轮副高副模型一个作平面运动的自由构件
平面机构的自由度计算.ppt
自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ321002自用盘编号JJ3
平面机构的自由度计算.ppt
第二章平面机构的自由度计算§2-1运动副及其分类构件-独立的运动单元运动副元素:两构件直接接触而构成运动副的点、线、面部分。例如:轴与轴承间构成运动副,轴的外圆柱面与轴承内孔为运动副元素。凸轮与滚子间构成运动副,凸轮与滚子接触部分为运动副元素。b)活动铰链转动副固定铰链和活动铰链模型(2)移动副:只允许两构件作相对移动。移动副模型2.高副:两构件以点或线接触而构成的运动副。齿轮副高副模型(二)空间运动副§2.2平面机构的运动简图二、平面机构运动简图的绘制2.转动副3.移动副4.平面高副机架两个活动构件联接