
一种流体自适应涡激振动电磁式发电装置.pdf

春景****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种流体自适应涡激振动电磁式发电装置.pdf
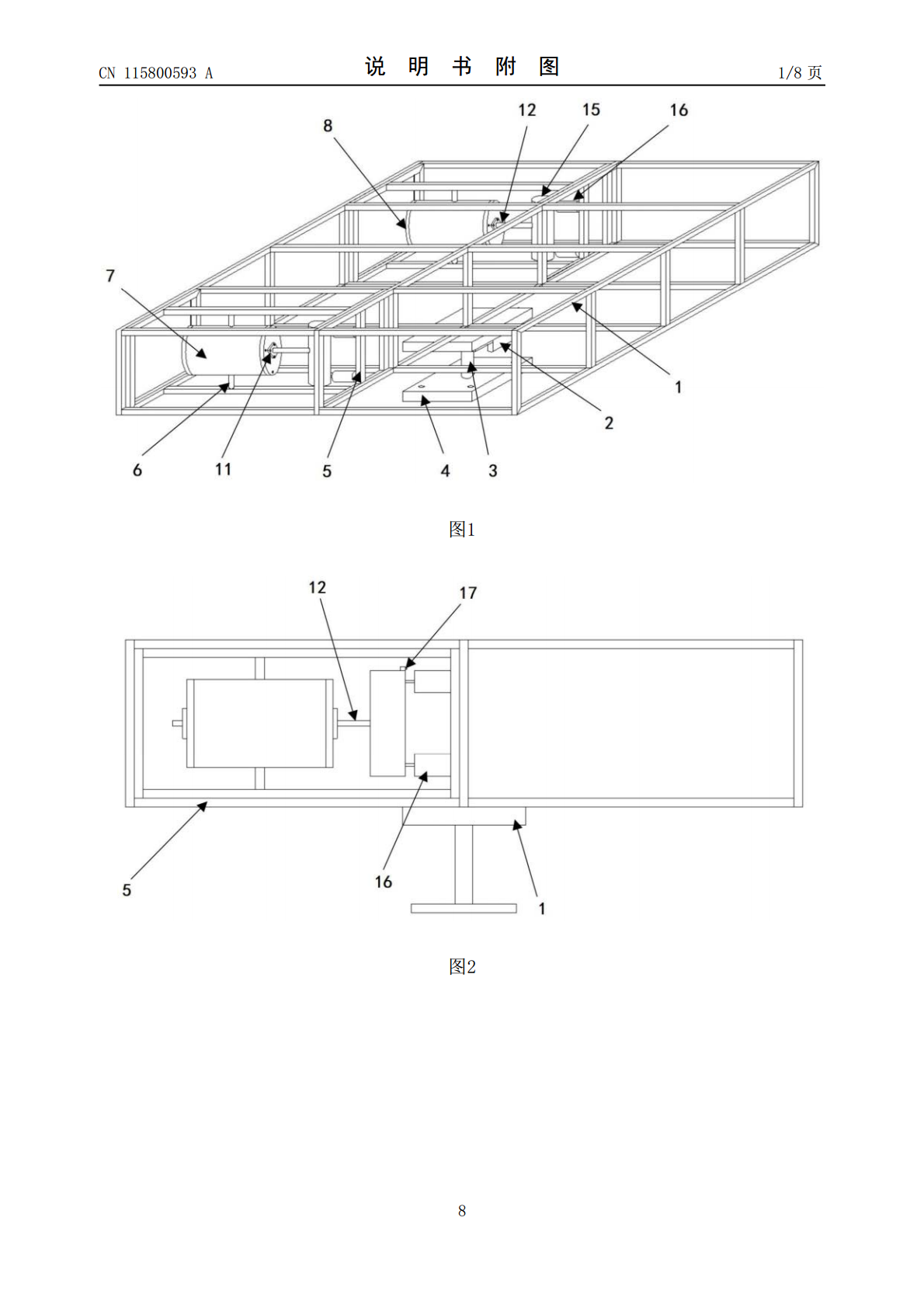
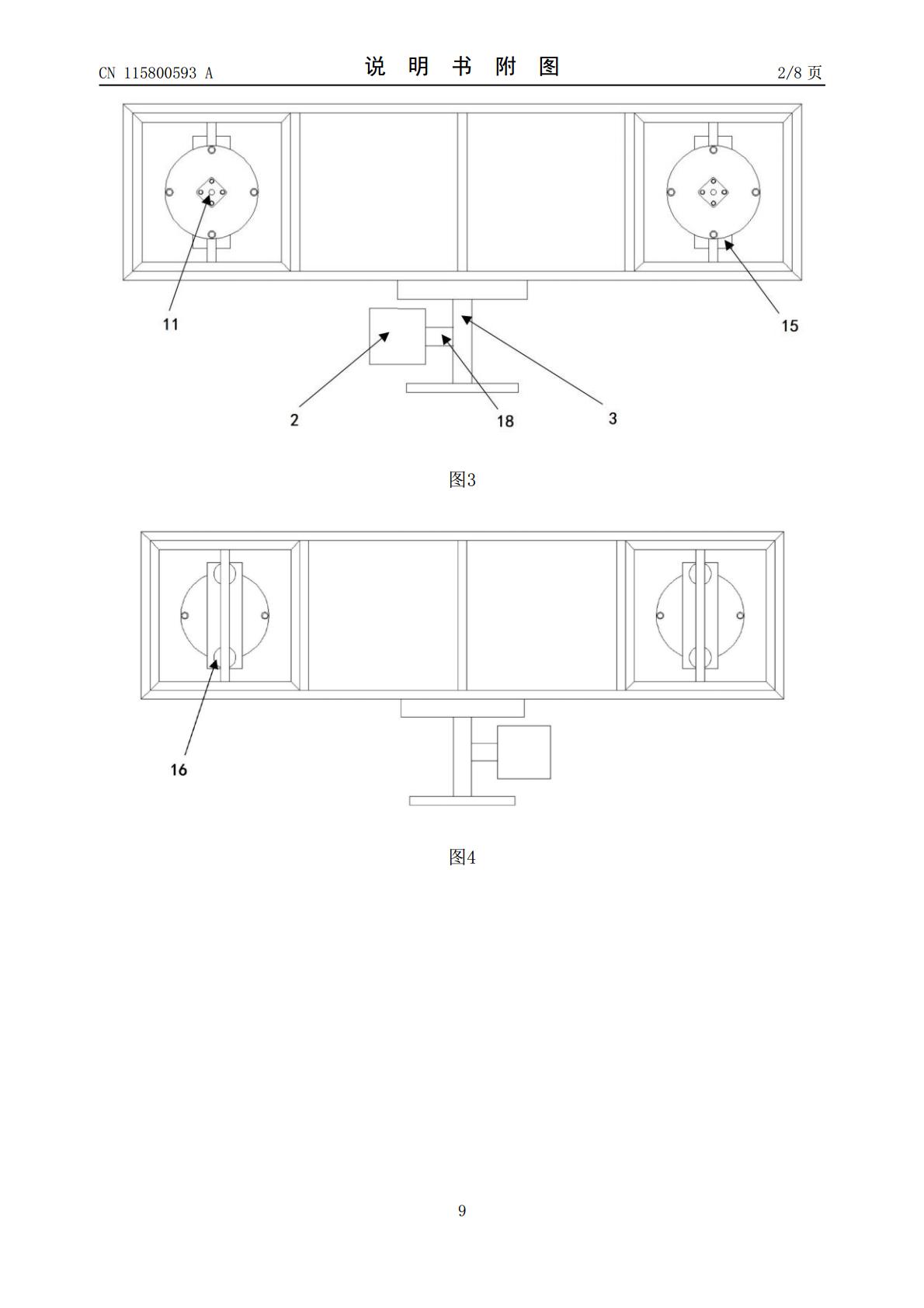
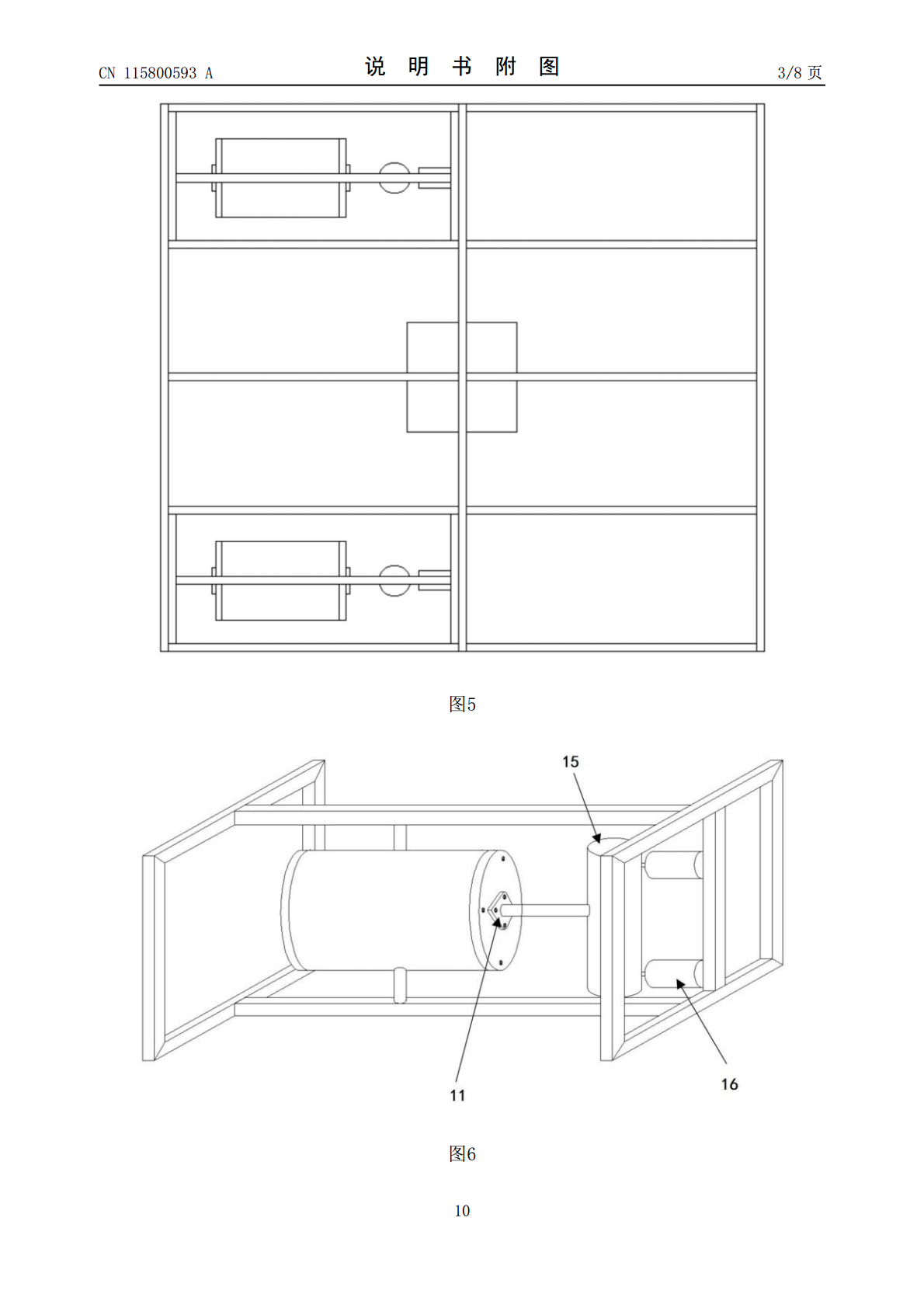
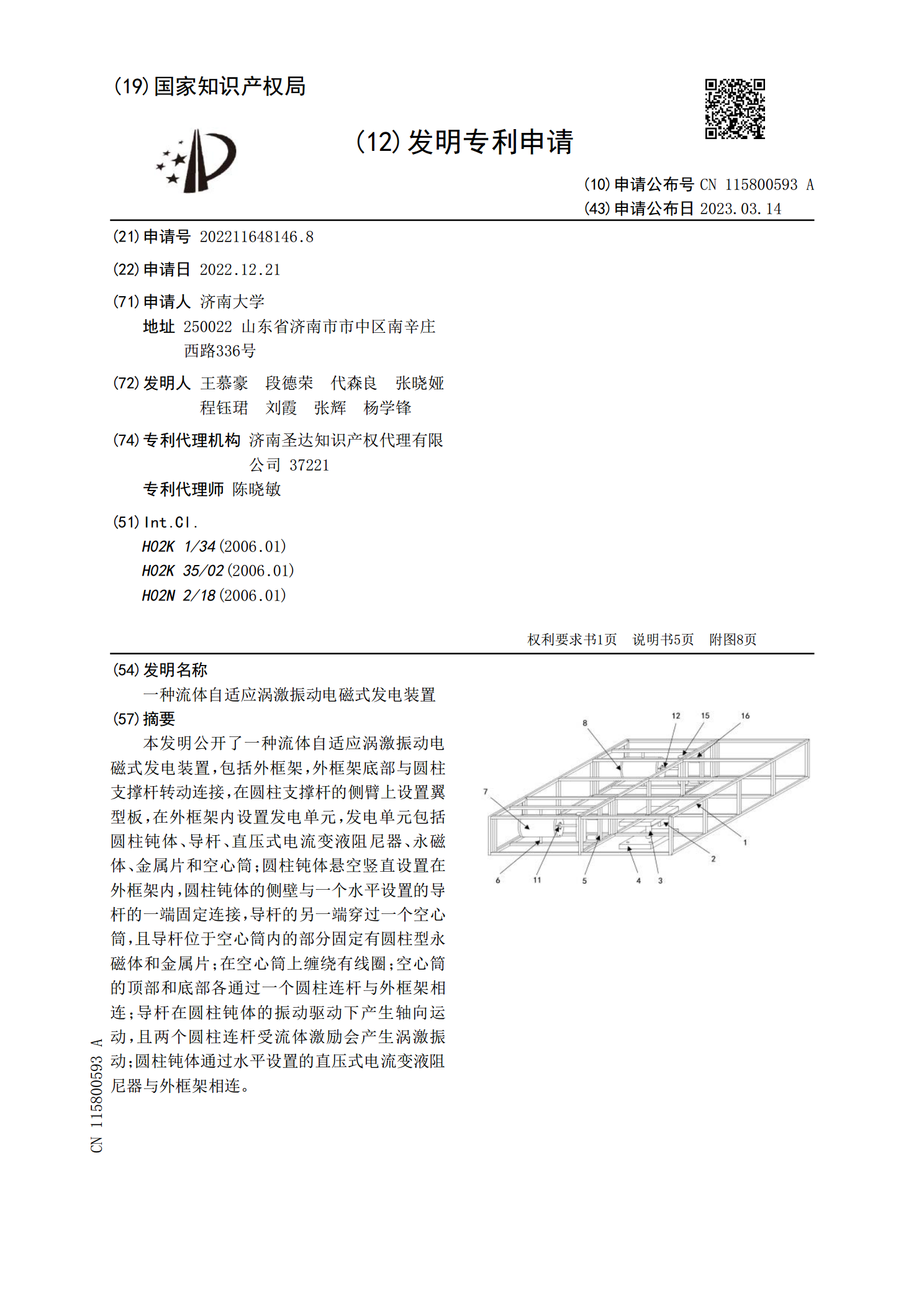
本发明公开了一种流体自适应涡激振动电磁式发电装置,包括外框架,外框架底部与圆柱支撑杆转动连接,在圆柱支撑杆的侧臂上设置翼型板,在外框架内设置发电单元,发电单元包括圆柱钝体、导杆、直压式电流变液阻尼器、永磁体、金属片和空心筒;圆柱钝体悬空竖直设置在外框架内,圆柱钝体的侧壁与一个水平设置的导杆的一端固定连接,导杆的另一端穿过一个空心筒,且导杆位于空心筒内的部分固定有圆柱型永磁体和金属片;在空心筒上缠绕有线圈;空心筒的顶部和底部各通过一个圆柱连杆与外框架相连;导杆在圆柱钝体的振动驱动下产生轴向运动,且两个圆柱连
一种涡激振动水流能发电装置.pdf
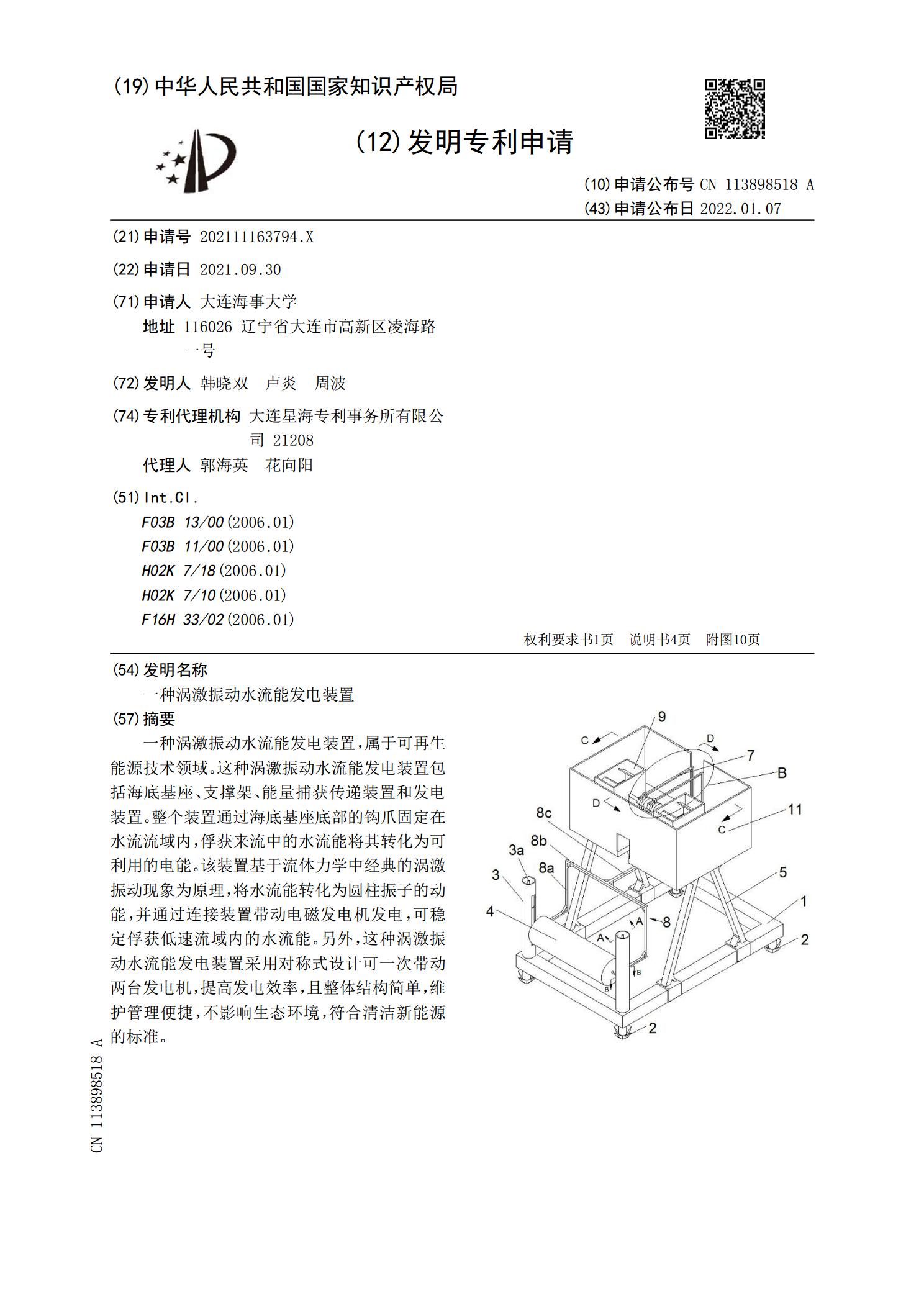
一种涡激振动水流能发电装置,属于可再生能源技术领域。这种涡激振动水流能发电装置包括海底基座、支撑架、能量捕获传递装置和发电装置。整个装置通过海底基座底部的钩爪固定在水流流域内,俘获来流中的水流能将其转化为可利用的电能。该装置基于流体力学中经典的涡激振动现象为原理,将水流能转化为圆柱振子的动能,并通过连接装置带动电磁发电机发电,可稳定俘获低速流域内的水流能。另外,这种涡激振动水流能发电装置采用对称式设计可一次带动两台发电机,提高发电效率,且整体结构简单,维护管理便捷,不影响生态环境,符合清洁新能源的标准。
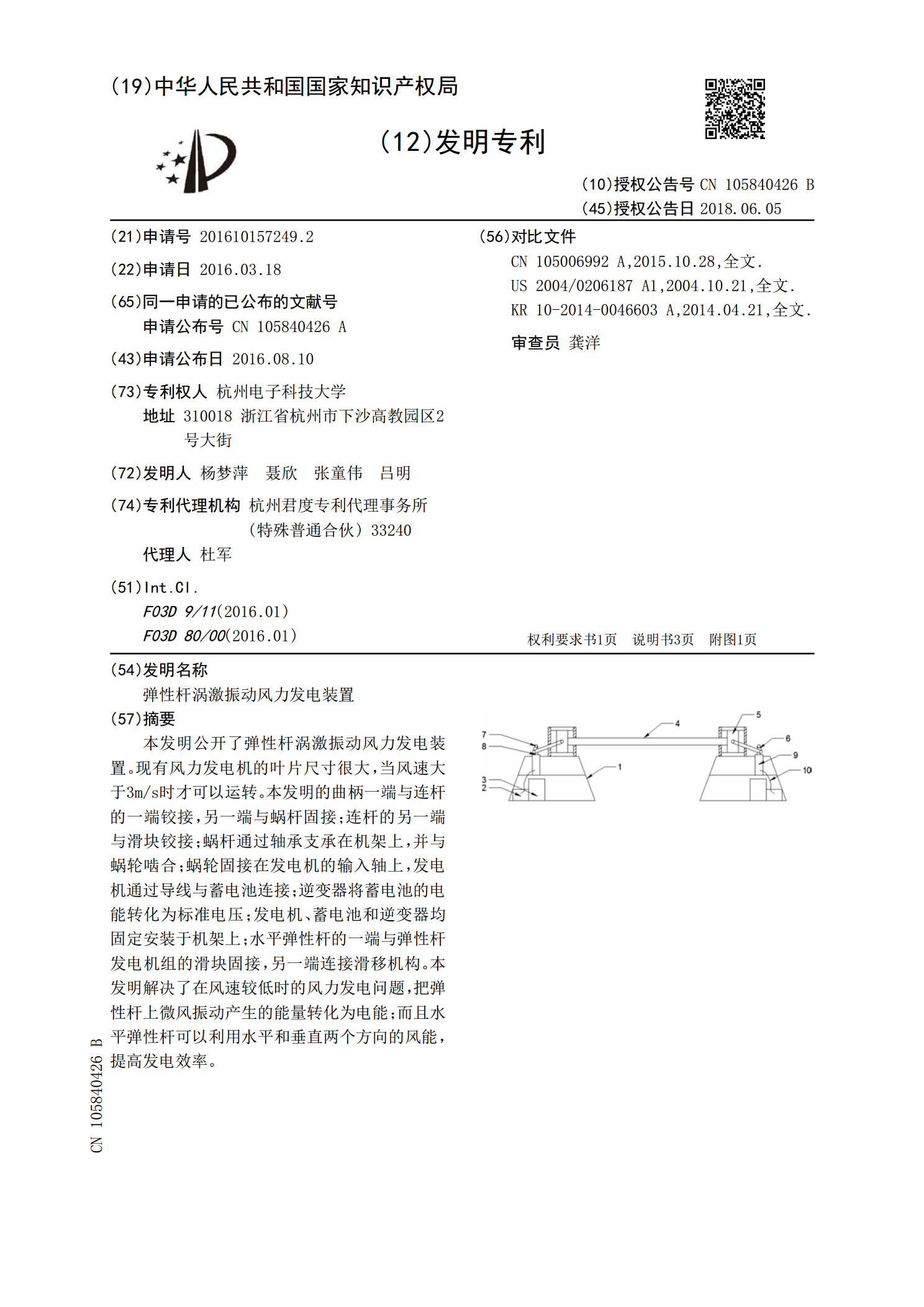
弹性杆涡激振动风力发电装置.pdf
本发明公开了弹性杆涡激振动风力发电装置。现有风力发电机的叶片尺寸很大,当风速大于3m/s时才可以运转。本发明的曲柄一端与连杆的一端铰接,另一端与蜗杆固接;连杆的另一端与滑块铰接;蜗杆通过轴承支承在机架上,并与蜗轮啮合;蜗轮固接在发电机的输入轴上,发电机通过导线与蓄电池连接;逆变器将蓄电池的电能转化为标准电压;发电机、蓄电池和逆变器均固定安装于机架上;水平弹性杆的一端与弹性杆发电机组的滑块固接,另一端连接滑移机构。本发明解决了在风速较低时的风力发电问题,把弹性杆上微风振动产生的能量转化为电能;而且水平弹性杆
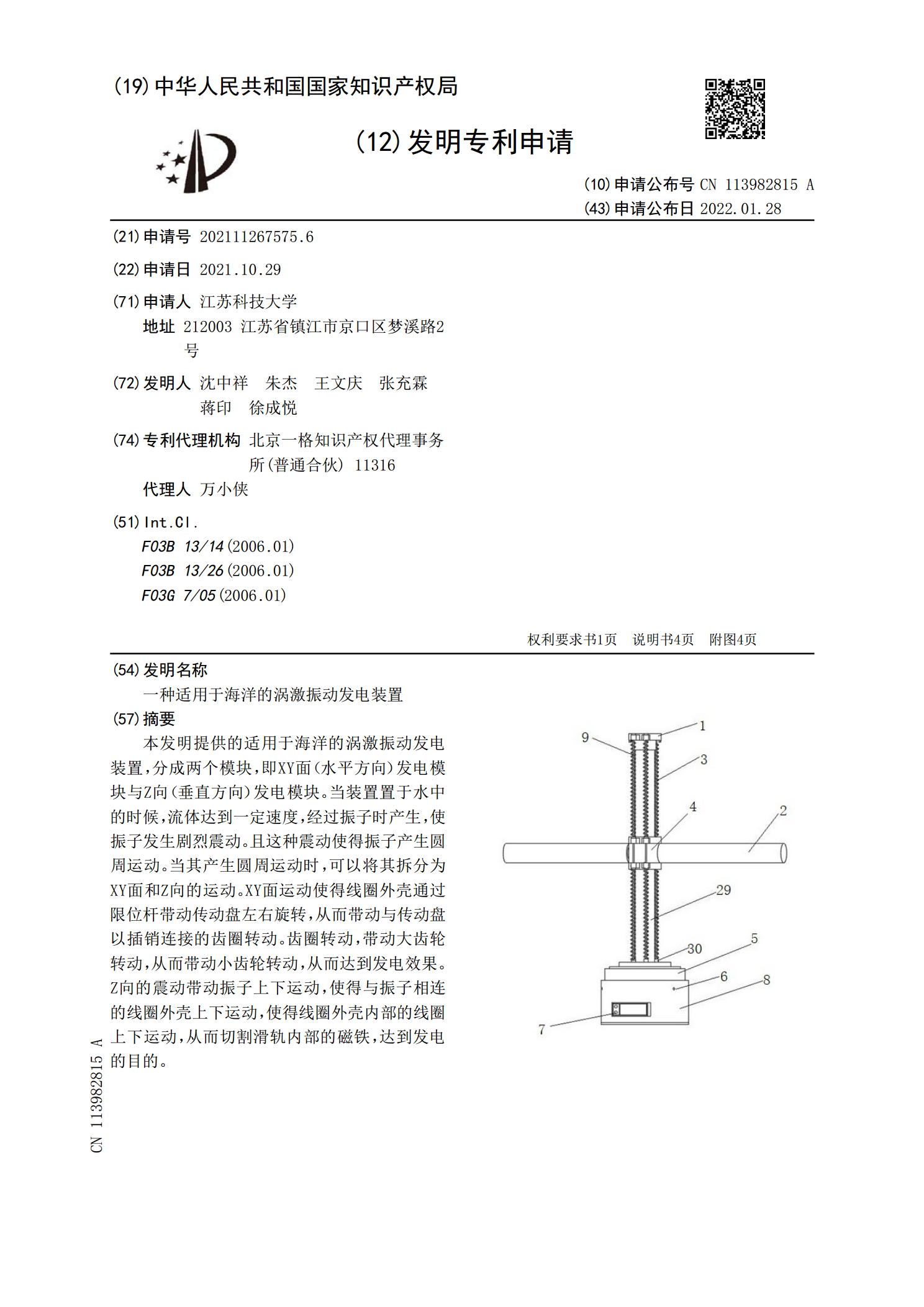
一种适用于海洋的涡激振动发电装置.pdf
本发明提供的适用于海洋的涡激振动发电装置,分成两个模块,即XY面(水平方向)发电模块与Z向(垂直方向)发电模块。当装置置于水中的时候,流体达到一定速度,经过振子时产生,使振子发生剧烈震动。且这种震动使得振子产生圆周运动。当其产生圆周运动时,可以将其拆分为XY面和Z向的运动。XY面运动使得线圈外壳通过限位杆带动传动盘左右旋转,从而带动与传动盘以插销连接的齿圈转动。齿圈转动,带动大齿轮转动,从而带动小齿轮转动,从而达到发电效果。Z向的震动带动振子上下运动,使得与振子相连的线圈外壳上下运动,使得线圈外壳内部的线
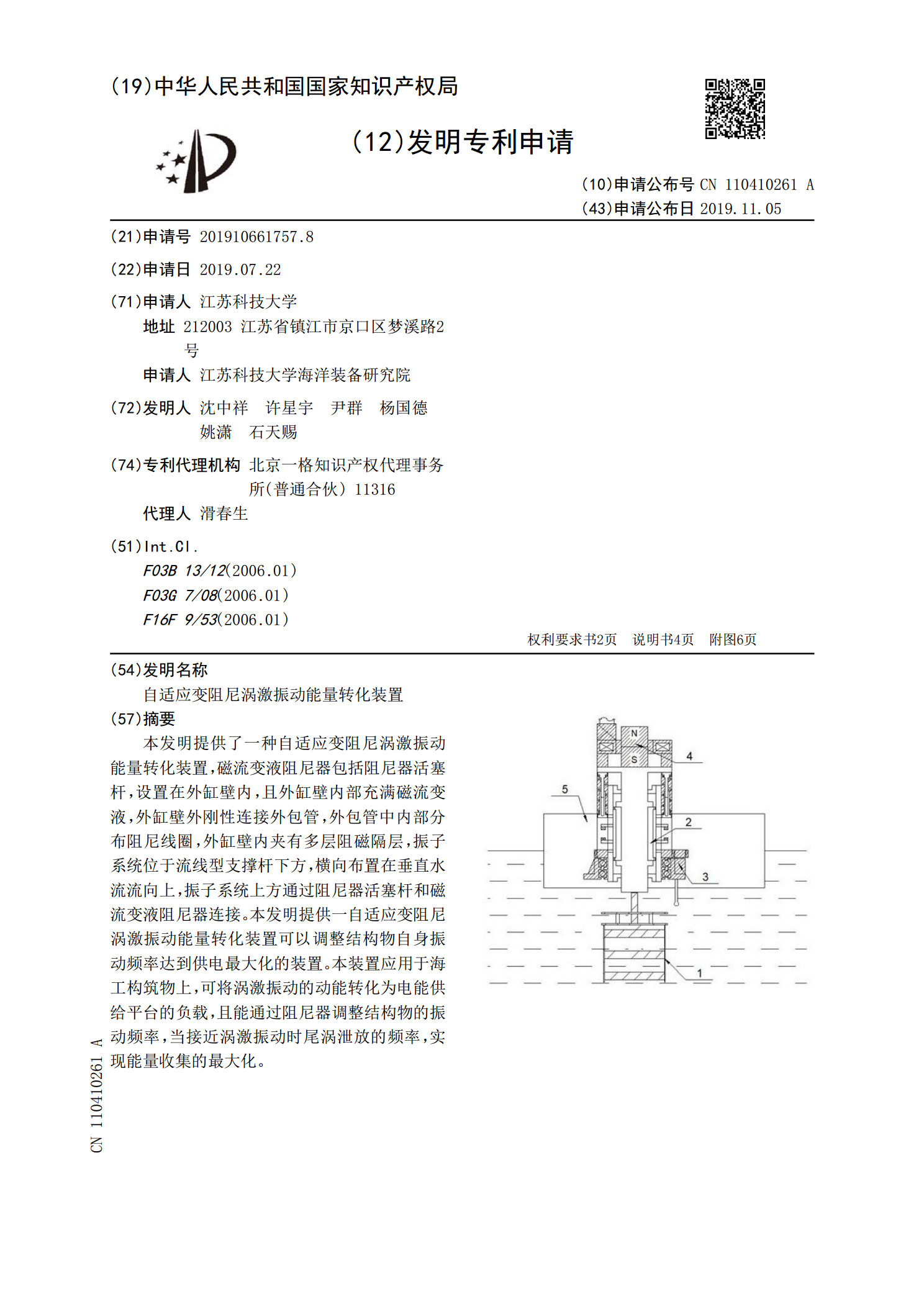
自适应变阻尼涡激振动能量转化装置.pdf
本发明提供了一种自适应变阻尼涡激振动能量转化装置,磁流变液阻尼器包括阻尼器活塞杆,设置在外缸壁内,且外缸壁内部充满磁流变液,外缸壁外刚性连接外包管,外包管中内部分布阻尼线圈,外缸壁内夹有多层阻磁隔层,振子系统位于流线型支撑杆下方,横向布置在垂直水流流向上,振子系统上方通过阻尼器活塞杆和磁流变液阻尼器连接。本发明提供一自适应变阻尼涡激振动能量转化装置可以调整结构物自身振动频率达到供电最大化的装置。本装置应用于海工构筑物上,可将涡激振动的动能转化为电能供给平台的负载,且能通过阻尼器调整结构物的振动频率,当接近