
剪叉式防倾支撑的高空作业平台.pdf

朋兴****en


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
剪叉式防倾支撑的高空作业平台.pdf
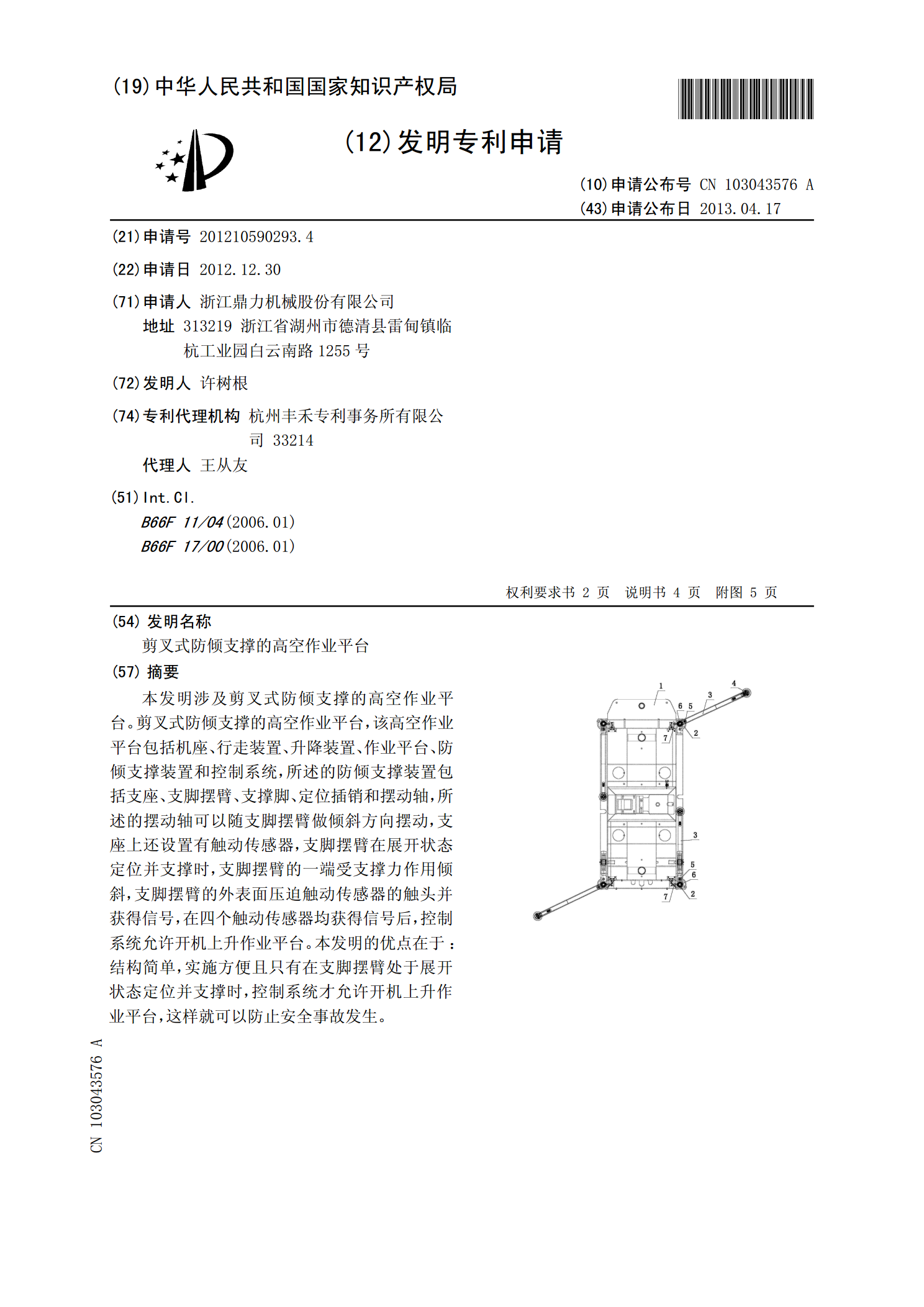
本发明涉及剪叉式防倾支撑的高空作业平台。剪叉式防倾支撑的高空作业平台,该高空作业平台包括机座、行走装置、升降装置、作业平台、防倾支撑装置和控制系统,所述的防倾支撑装置包括支座、支脚摆臂、支撑脚、定位插销和摆动轴,所述的摆动轴可以随支脚摆臂做倾斜方向摆动,支座上还设置有触动传感器,支脚摆臂在展开状态定位并支撑时,支脚摆臂的一端受支撑力作用倾斜,支脚摆臂的外表面压迫触动传感器的触头并获得信号,在四个触动传感器均获得信号后,控制系统允许开机上升作业平台。本发明的优点在于:结构简单,实施方便且只有在支脚摆臂处于展

套缸式防倾支撑的高空作业平台.pdf
本发明涉及套缸式防倾支撑的高空作业平台。套缸式防倾支撑的高空作业平台,该高空作业平台包括机座、行走装置、升降装置、作业平台、防倾支撑装置和控制系统,所述的防倾支撑装置包括支座、支脚摆臂、支撑脚、定位插销和摆动轴,所述的摆动轴可以随支脚摆臂做倾斜方向摆动,支座上还设置有触动传感器,所述的支脚摆臂在展开状态定位并支撑时支脚摆臂的一端受支撑力作用倾斜,支脚摆臂的外表面压迫触动传感器获得信号,在四个触动传感器均获得信号后,控制系统允许开机上升作业平台。本发明的优点在于:结构简单,实施方便且只有在支脚摆臂处于展开状

防倾支撑的高空作业平台.pdf
本发明涉及防倾支撑的高空作业平台。防倾支撑的高空作业平台,该高空作业平台包括机座、行走装置、升降装置、作业平台、防倾支撑装置和控制系统,所述的防倾支撑装置包括支座、支脚摆臂、支撑脚、定位插销和摆动轴,所述的摆动轴可以随支脚摆臂做倾斜方向摆动,所述的支座上还设置有触动传感器,所述的支脚摆臂在展开状态定位并支撑时所述的支脚摆臂的一端受支撑力作用倾斜,支脚摆臂的外表面压迫所述的触动传感器的触头使触动传感器获得信号,控制系统允许开机上升作业平台。本发明的优点在于:发明具有结构简单,实施方便的特点,且只有在支脚摆臂

带防坑洼倾斜装置的剪叉式高空作业平台.pdf
本发明涉及一种带安全装置的升降机械,尤其涉及一种带防坑洼倾斜装置的升降机械。带防坑洼倾斜装置的剪叉式高空作业平台,包括防坑洼倾斜装置,防坑洼倾斜装置包括分别铰接设置在机身底座的2侧板下方的保护板和上端可与升降平台相抵的顶杆装置,2个保护板竖直设置,并分别通过传动装置与顶杆装置相连接,所述的传动装置为钢丝绳,顶杆装置的下部与钢丝绳相抵,并在顶杆装置的2侧分别设有提升滑轮,提升滑轮的2侧分别设有定位滑轮,钢丝绳穿过提升滑轮和定位滑轮,钢丝绳的2端分别与保护板固定连接,顶杆装置下压钢丝绳时,钢丝绳拉动保护板收起

剪叉式高空作业平台租赁合同.doc
剪叉式高空作业平台租赁合同剪叉式高空作业平台租赁合同甲方:_________(以下简称:出租方)乙方:_________(以下简称:承租方)根据《中华人民共和国民法典》及有关规定为明确设备租费双方的权利和义务经双方协商待订立本合同以便共同遵守:第一条设备名称、型号、规格及数量第二条租赁期限_________年_________月_________日至_________年_________月________日止。合同期满如需要继续租用应在本合同期满前十五________日