
一种自复位屈曲约束支撑的滞回性能分析方法.pdf

山柳****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自复位屈曲约束支撑的滞回性能分析方法.pdf
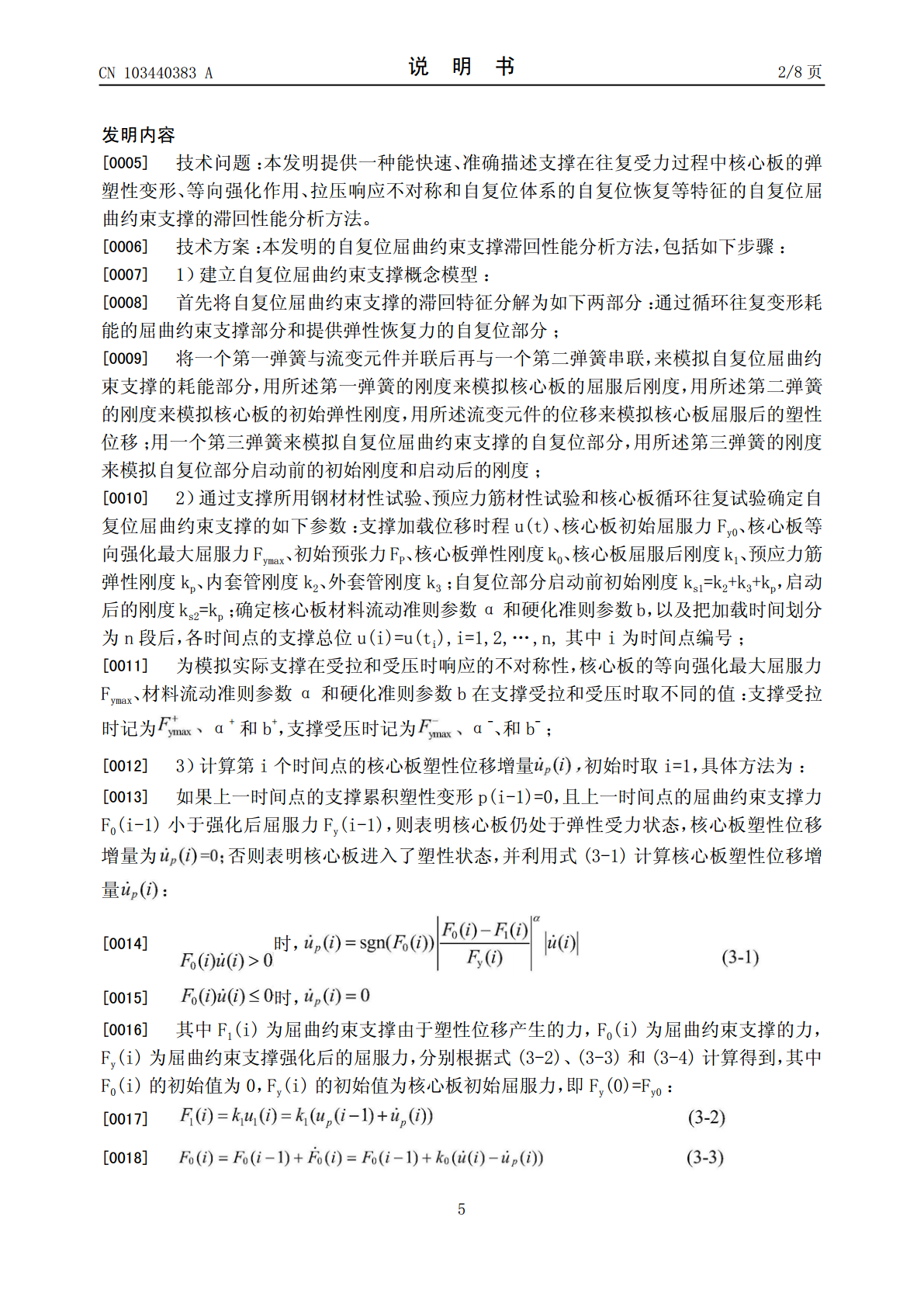
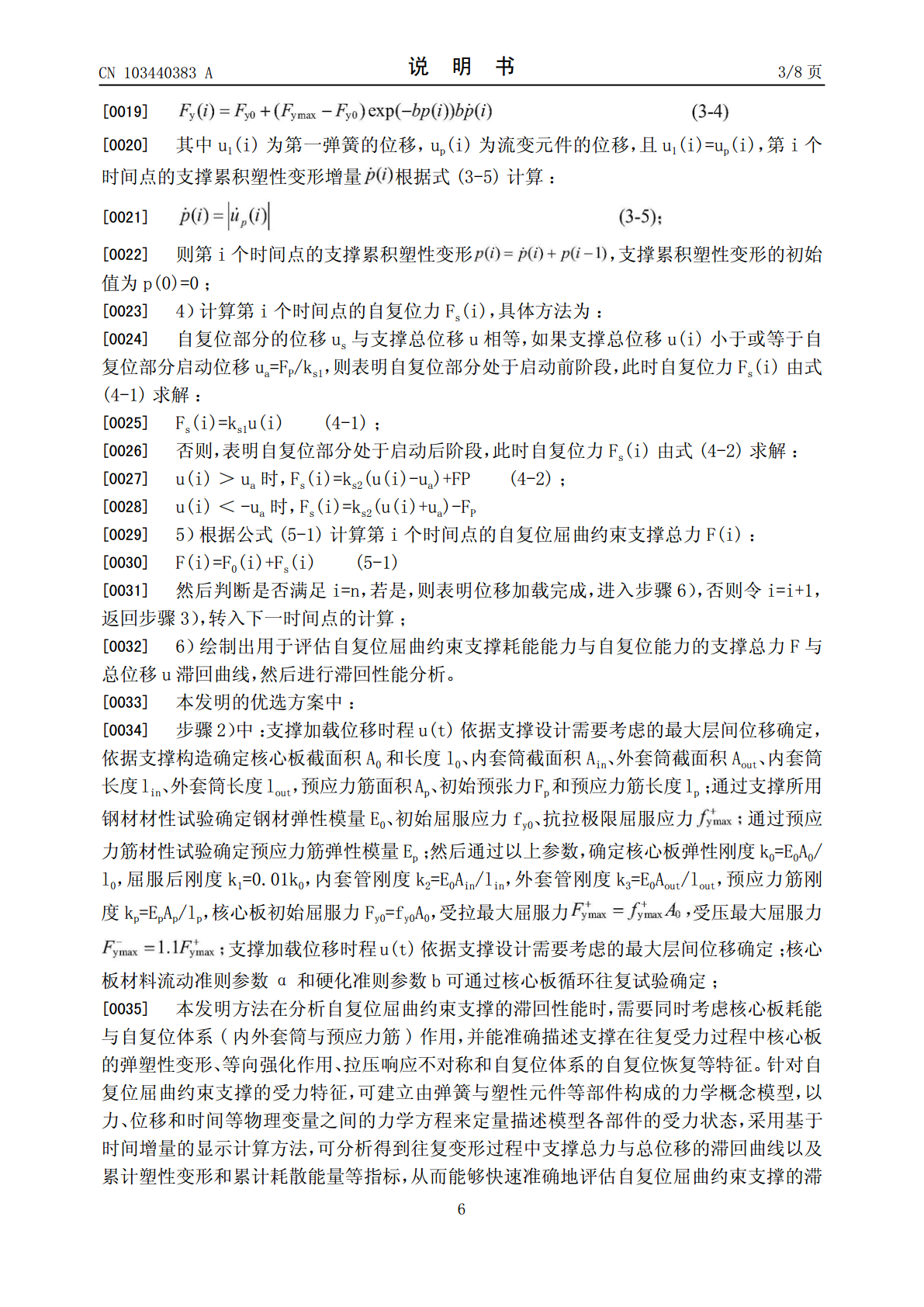
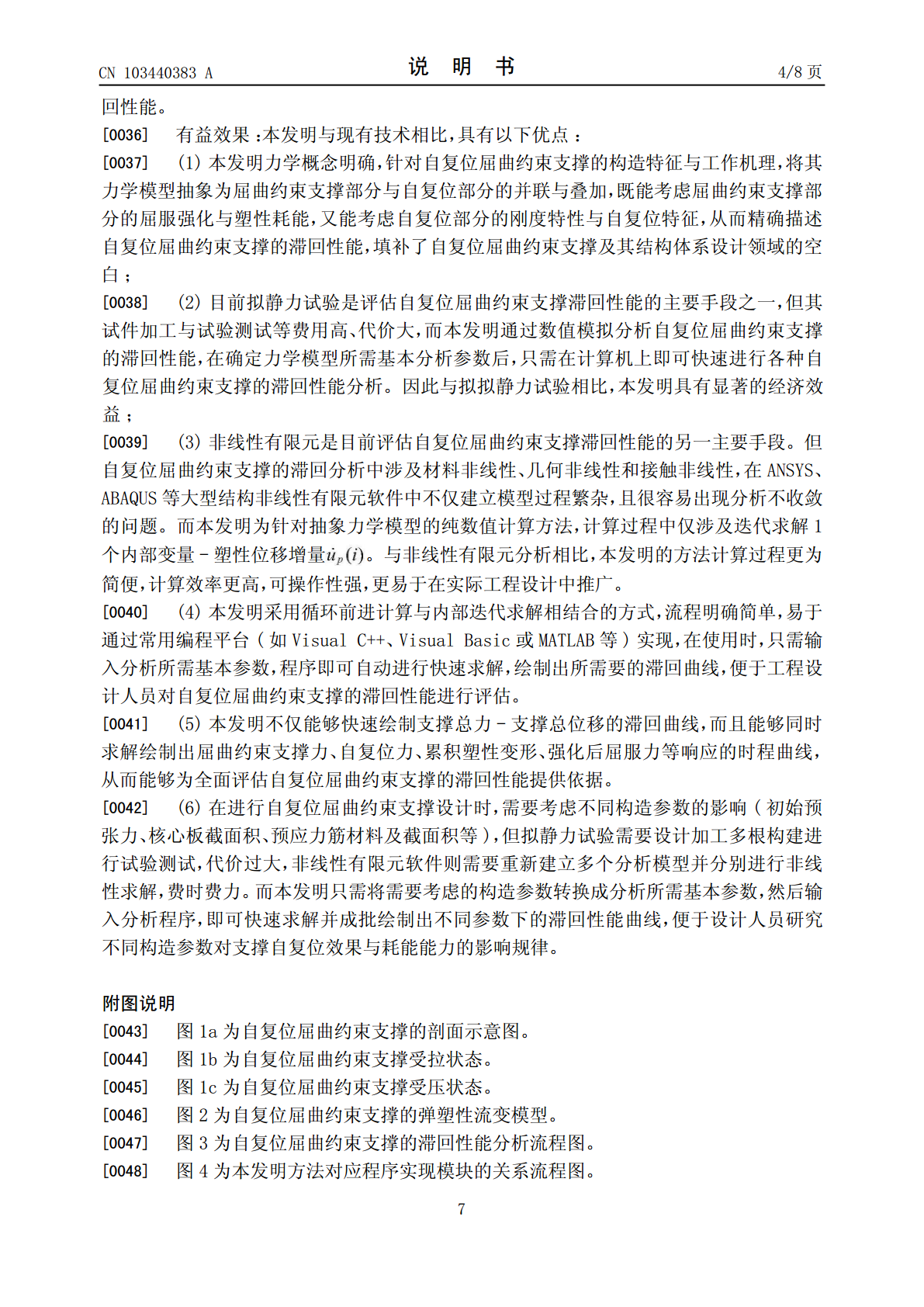
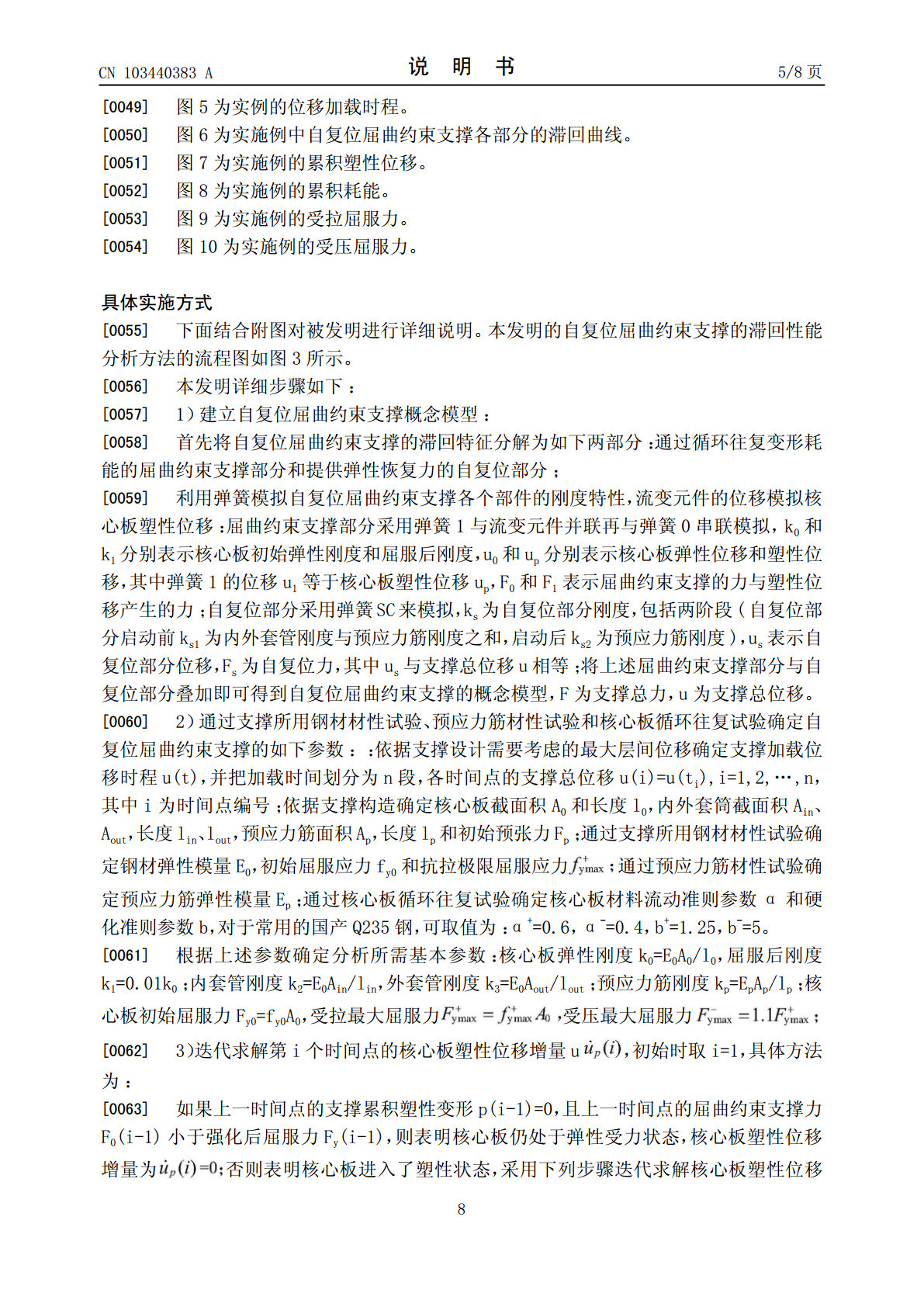
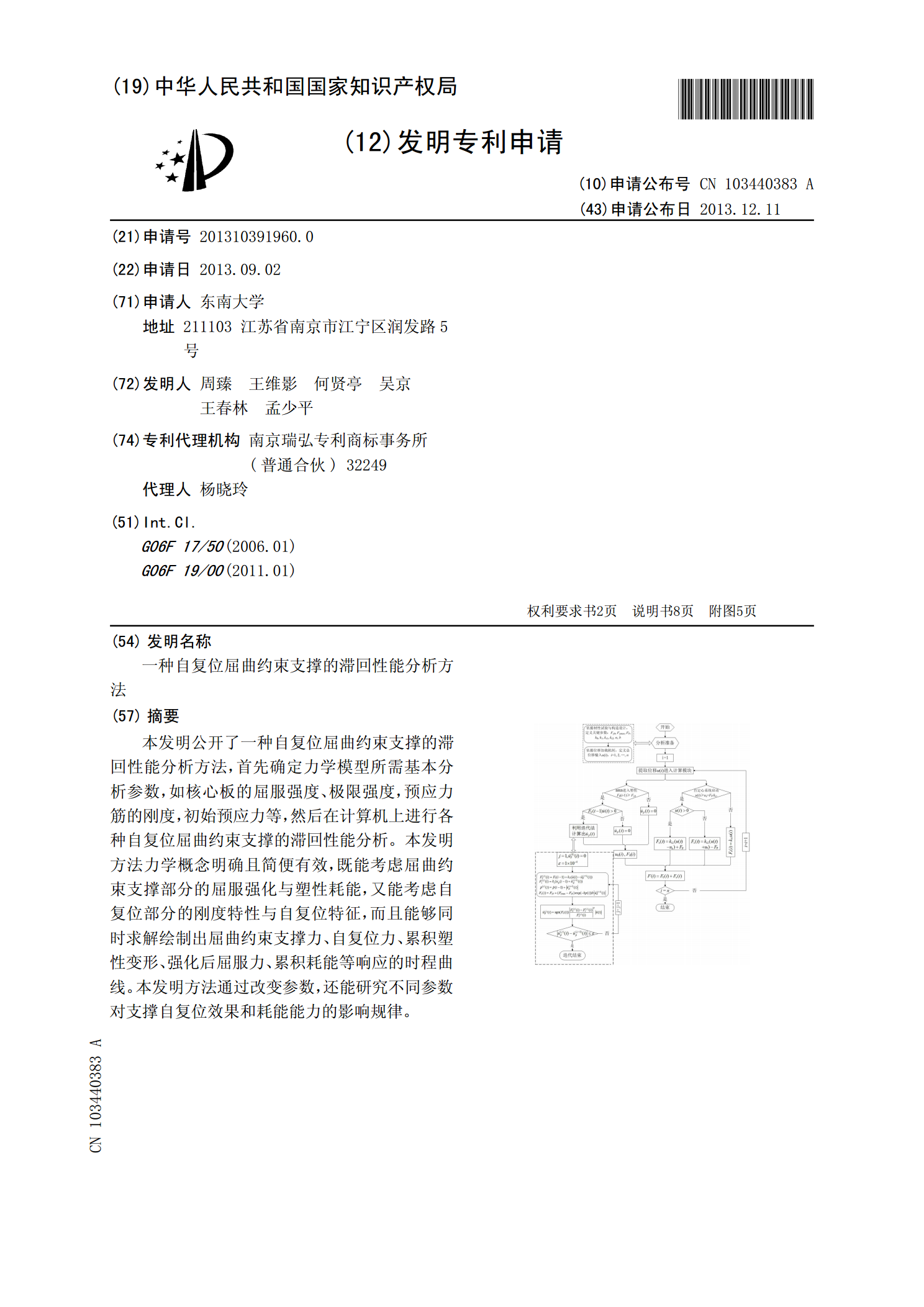
本发明公开了一种自复位屈曲约束支撑的滞回性能分析方法,首先确定力学模型所需基本分析参数,如核心板的屈服强度、极限强度,预应力筋的刚度,初始预应力等,然后在计算机上进行各种自复位屈曲约束支撑的滞回性能分析。本发明方法力学概念明确且简便有效,既能考虑屈曲约束支撑部分的屈服强化与塑性耗能,又能考虑自复位部分的刚度特性与自复位特征,而且能够同时求解绘制出屈曲约束支撑力、自复位力、累积塑性变形、强化后屈服力、累积耗能等响应的时程曲线。本发明方法通过改变参数,还能研究不同参数对支撑自复位效果和耗能能力的影响规律。

三套管自复位屈曲约束支撑滞回性能研究.docx
三套管自复位屈曲约束支撑滞回性能研究三套管自复位屈曲约束支撑滞回性能研究摘要:本文针对三套管自复位屈曲约束支撑滞回性能进行了研究。通过实验和数值模拟的方法,对不同参数下的屈曲约束支撑滞回性能进行了分析。研究结果表明,三套管自复位屈曲约束支撑滞回性能受到多种因素的影响,如支撑参数、施加荷载、管道材料等。该研究为进一步优化三套管自复位屈曲约束支撑设计提供了理论依据。关键词:三套管、自复位、屈曲约束支撑、滞回性能、参数分析1.引言三套管自复位屈曲约束支撑是一种常用的结构设计形式,广泛应用于各种工程中。屈曲约束支

三套管自复位屈曲约束支撑滞回性能研究.docx
三套管自复位屈曲约束支撑滞回性能研究为题目,写不少于1200的论文摘要本文研究了三套管自复位屈曲约束支撑滞回性能。首先介绍了三套管的基本结构特点和复位原理。然后阐述了屈曲约束对管道受载性能的影响以及支撑对管道受载性能的改善。最后以实验数据来验证三套管的滞回性能。结果表明,在屈曲约束和支撑滞回的作用下,三套管具有较好的抗震、抗风等能力,可以有效防止管道的变形和破坏。关键词:三套管;自复位;滞回性能;屈曲约束;支撑AbstractThispaperstudiesthehysteresisperformance

抑制屈曲支撑滞回性能分析.docx
抑制屈曲支撑滞回性能分析前言:抑制屈曲支撑滞回性能是钢结构设计中的重要问题,其直接影响到结构的安全性能和抗震性能。本文主要从几个方面阐述抑制屈曲支撑滞回性能分析的基本方法和技巧。一、抑制屈曲支撑的结构形式抑制屈曲支撑常用于钢框架结构、钢管混凝土框架结构等类型结构中。通过增加屈曲支撑的刚度,可以提高结构抗震性能和减小结构变形。二、抑制屈曲支撑滞回性能的评估方法在抑制屈曲支撑的结构中,屈曲支撑的滞回性能对结构整体性能具有重要影响。因此,评估抑制屈曲支撑滞回性能的方法十分重要。主要有以下几种方法:1、理论分析法

SMA预拉杆式自定心屈曲约束支撑的滞回性能分析.docx
SMA预拉杆式自定心屈曲约束支撑的滞回性能分析随着建筑结构的不断发展与进步,人们对结构的要求也越来越高。在高层建筑或大跨度桥梁结构中,偏心受力的问题是一个不容忽视的因素。为了提高结构的安全性和稳定性,研究人员提出了一种新型的自定心屈曲约束支撑装置——SMA预拉杆式自定心屈曲约束支撑。本文将对该装置的滞回性能进行分析。一、SMA预拉杆式自定心屈曲约束支撑的结构及工作原理SMA预拉杆式自定心屈曲约束支撑是由普通钢材和形状记忆合金(SMA)制成的。该装置具有良好的耐久性、优异的自恢复性能和压缩韧性,可以很好地抵