
防误触智能自锁止限位腕带和限位系统.pdf

纪阳****公主

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
防误触智能自锁止限位腕带和限位系统.pdf
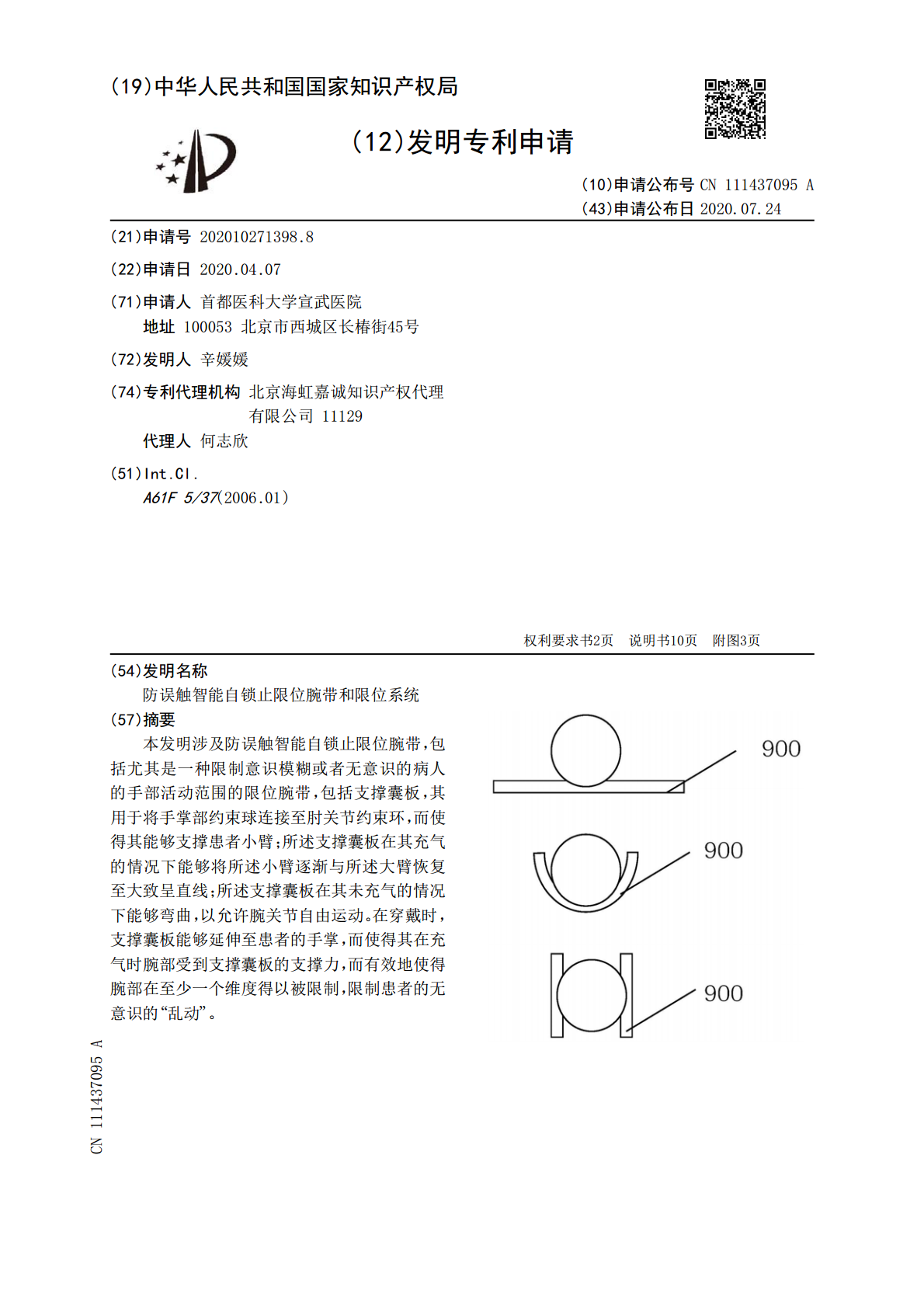
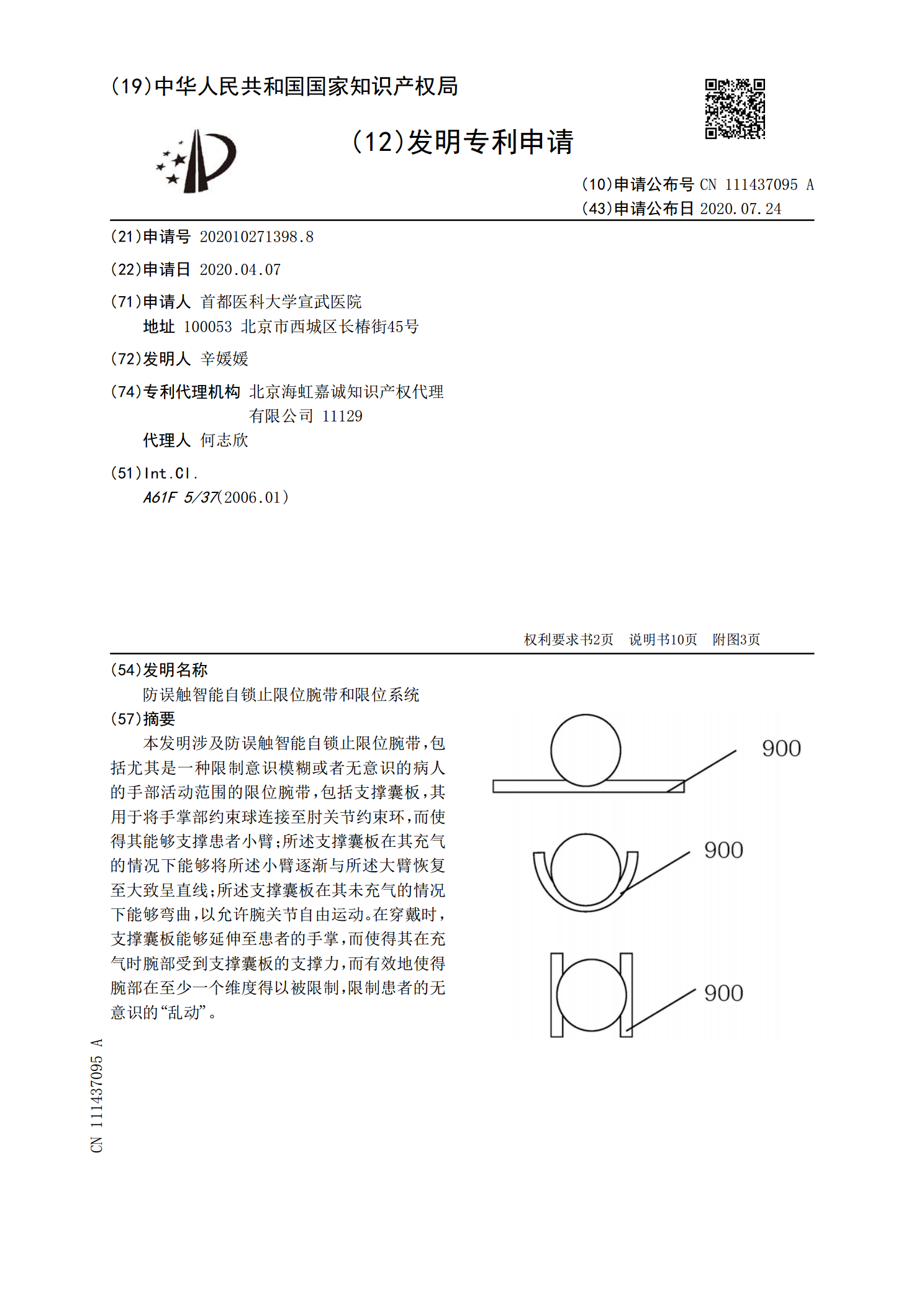
本发明涉及防误触智能自锁止限位腕带,包括尤其是一种限制意识模糊或者无意识的病人的手部活动范围的限位腕带,包括支撑囊板,其用于将手掌部约束球连接至肘关节约束环,而使得其能够支撑患者小臂;所述支撑囊板在其充气的情况下能够将所述小臂逐渐与所述大臂恢复至大致呈直线;所述支撑囊板在其未充气的情况下能够弯曲,以允许腕关节自由运动。在穿戴时,支撑囊板能够延伸至患者的手掌,而使得其在充气时腕部受到支撑囊板的支撑力,而有效地使得腕部在至少一个维度得以被限制,限制患者的无意识的“乱动”。
自锁式限位合页.pdf
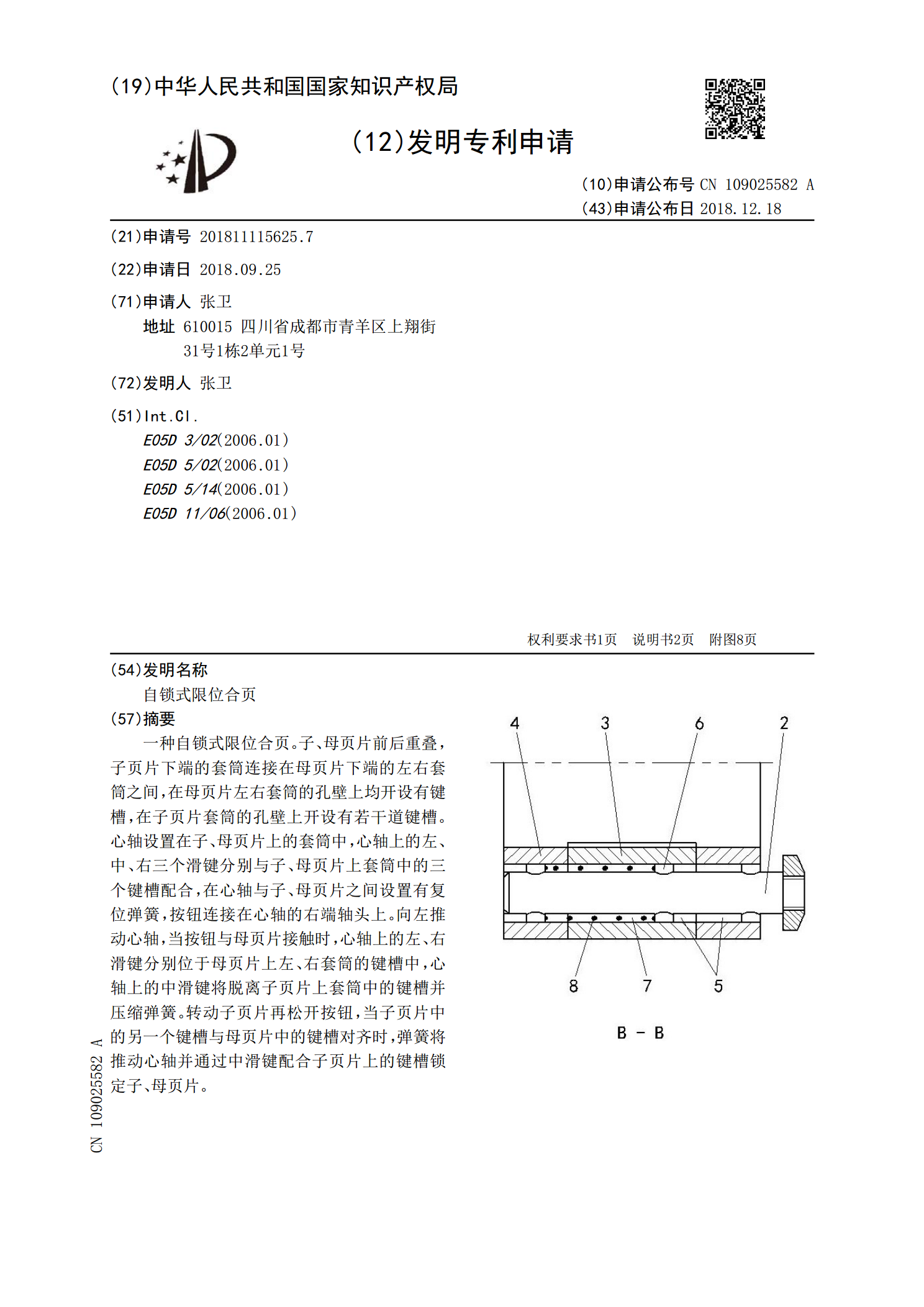
一种自锁式限位合页。子、母页片前后重叠,子页片下端的套筒连接在母页片下端的左右套筒之间,在母页片左右套筒的孔壁上均开设有键槽,在子页片套筒的孔壁上开设有若干道键槽。心轴设置在子、母页片上的套筒中,心轴上的左、中、右三个滑键分别与子、母页片上套筒中的三个键槽配合,在心轴与子、母页片之间设置有复位弹簧,按钮连接在心轴的右端轴头上。向左推动心轴,当按钮与母页片接触时,心轴上的左、右滑键分别位于母页片上左、右套筒的键槽中,心轴上的中滑键将脱离子页片上套筒中的键槽并压缩弹簧。转动子页片再松开按钮,当子页片中的另一个
一种带限位锁功能的联动锁系统.pdf
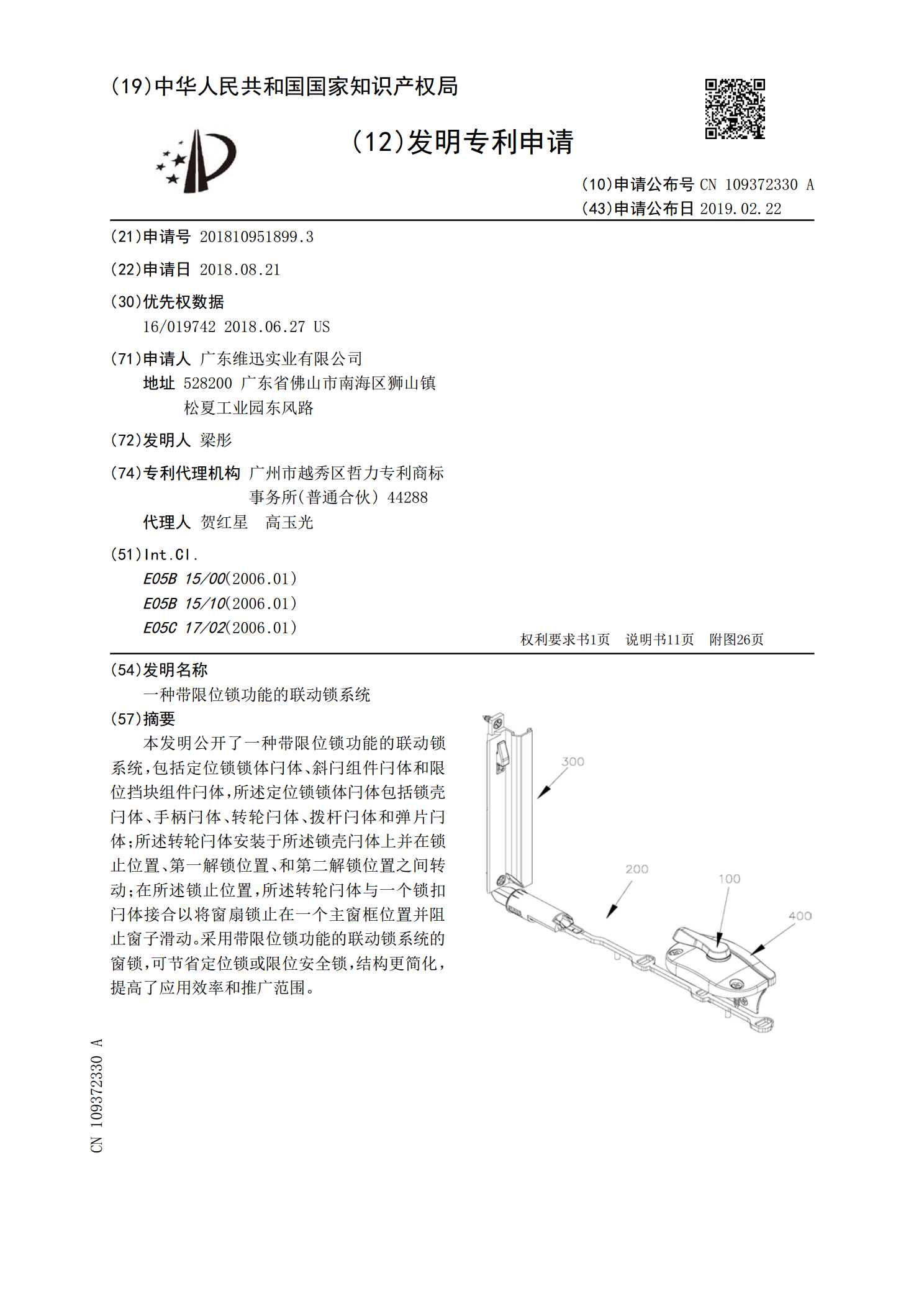
本发明公开了一种带限位锁功能的联动锁系统,包括定位锁锁体闩体、斜闩组件闩体和限位挡块组件闩体,所述定位锁锁体闩体包括锁壳闩体、手柄闩体、转轮闩体、拨杆闩体和弹片闩体;所述转轮闩体安装于所述锁壳闩体上并在锁止位置、第一解锁位置、和第二解锁位置之间转动;在所述锁止位置,所述转轮闩体与一个锁扣闩体接合以将窗扇锁止在一个主窗框位置并阻止窗子滑动。采用带限位锁功能的联动锁系统的窗锁,可节省定位锁或限位安全锁,结构更简化,提高了应用效率和推广范围。

内摇盖限位自锁结构.pdf
本方案公开了一种内摇盖限位自锁结构,包括左右依次相连的左侧板、前侧板、右侧板和后侧板,左侧板的上侧边向上连接有左上摇盖,前侧板向上连接有锁舌,右侧板的上侧边向上连接有右上摇盖,后侧板的上侧边向上连接有上盖,上盖的上侧边向上连接有插舌,顶盖的上侧边上开设有锁舌孔,锁舌上设有锁舌侧限位边;左上摇盖和/或右上摇盖设有锁舌配合缺口,锁舌配合缺口上设有摇盖侧限位边;折叠后,摇盖侧限位边与锁舌侧限位边构成阻止锁舌向后退回的限位结构。本方案的有益效果是:针对结构强度问题进行了优化,消除了应力集中点,提高了锁定结构对意外
一种油箱卡带固定限位锁止装置.pdf
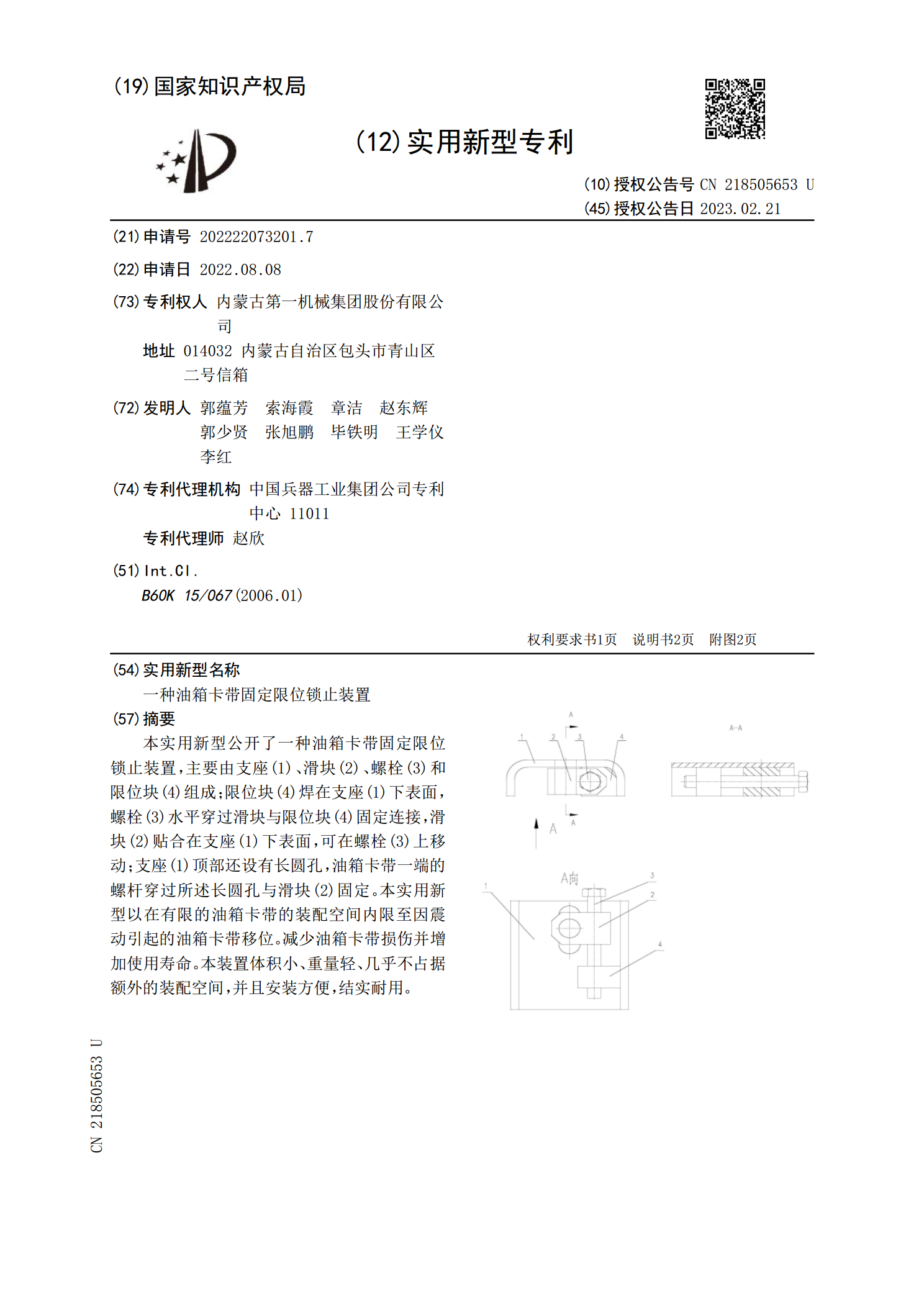
本实用新型公开了一种油箱卡带固定限位锁止装置,主要由支座(1)、滑块(2)、螺栓(3)和限位块(4)组成;限位块(4)焊在支座(1)下表面,螺栓(3)水平穿过滑块与限位块(4)固定连接,滑块(2)贴合在支座(1)下表面,可在螺栓(3)上移动;支座(1)顶部还设有长圆孔,油箱卡带一端的螺杆穿过所述长圆孔与滑块(2)固定。本实用新型以在有限的油箱卡带的装配空间内限至因震动引起的油箱卡带移位。减少油箱卡带损伤并增加使用寿命。本装置体积小、重量轻、几乎不占据额外的装配空间,并且安装方便,结实耐用。