
背部支撑力跟随控制方法及背部跟随支撑装置.pdf

Th****s3


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

背部支撑力跟随控制方法及背部跟随支撑装置.pdf
本发明提供一种背部支撑力跟随控制方法及背部跟随支撑装置,包括:S1,获取压强基准值,将压强上限值设置为初始上限值,将压强下限值设置为初始下限值;S2,判断布置于用户腰背处的垫靠气囊内的当前压强值是否小于压强上限值;S3,判断当前压强值是否小于压强下限值,若是则将压强下限值调高为压强基准值,并向垫靠气囊充气,再次执行当前步骤,若否则执行S4;S4,判断当前压强值是否大于压强上限值,若是则将压强上限值调低为压强基准值,并使垫靠气囊放气,再次执行当前步骤,若否则执行S5;S5,对垫靠气囊保压,随后跳回至S3。本
背部跟随支撑装置及办公椅.pdf
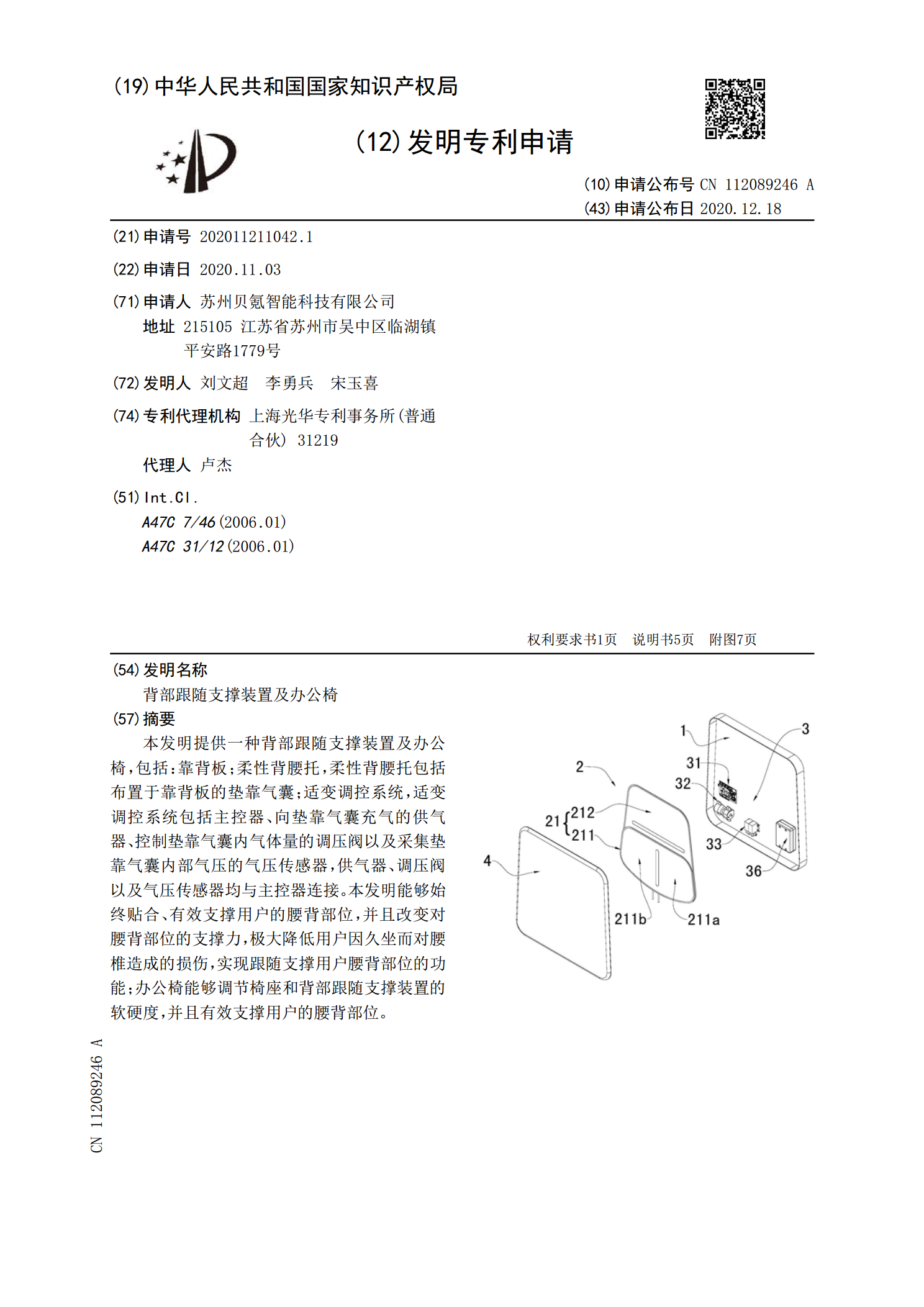
本发明提供一种背部跟随支撑装置及办公椅,包括:靠背板;柔性背腰托,柔性背腰托包括布置于靠背板的垫靠气囊;适变调控系统,适变调控系统包括主控器、向垫靠气囊充气的供气器、控制垫靠气囊内气体量的调压阀以及采集垫靠气囊内部气压的气压传感器,供气器、调压阀以及气压传感器均与主控器连接。本发明能够始终贴合、有效支撑用户的腰背部位,并且改变对腰背部位的支撑力,极大降低用户因久坐而对腰椎造成的损伤,实现跟随支撑用户腰背部位的功能;办公椅能够调节椅座和背部跟随支撑装置的软硬度,并且有效支撑用户的腰背部位。

自跟随行李箱及其系统、自跟随装置及其控制方法.pdf
本发明揭示了一种自跟随行李箱、自跟随行李箱系统、自跟随装置,自跟随行李箱系统包括行李箱本体、便携终端,所述行李箱本体与便携终端无线连接;所述行李箱本体包括:壳体、行走轮、行走驱动电机、第一主控电路板、第一无线通讯单元、第一运动传感器、第一定位单元、第一电源模块;所述便携终端包括第二主控电路板、第二电源模块、第二无线通讯单元、第二运动传感器、第二定位单元;所述便携终端通过第二无线通讯单元向行李箱本体发送位置信息,第一主控电路板控制行走驱动电机朝向便携终端发送的位置信息行驶。本发明提出的自跟随行李箱、自跟随行

基于领航-跟随策略的跟随AGV协同控制方法.docx
基于领航-跟随策略的跟随AGV协同控制方法基于领航-跟随策略的跟随AGV协同控制方法摘要:随着物流行业的快速发展,自主导航AGV(AutomatedGuidedVehicle)在物流场景中发挥着重要作用。在一些特殊情况下,如狭窄的通道或高流量的运输场所,单个AGV未能满足物流系统的需求。因此,本文提出了基于领航-跟随策略的跟随AGV协同控制方法,以提高物流系统的整体效率和安全性。关键词:AGV、领航-跟随策略、协同控制、物流系统、效率、安全性1.引言自主导航AGV已经广泛应用于工业自动化领域,通过自动化的

跟随磨削中在线跟随直径测量方法及装置.pdf
本发明涉及一种跟随磨削中在线跟随直径测量方法及装置,所述方法是在磨削过程中使双卡爪测头的两卡爪始终弹性夹持在被加工圆柱的外径上,保留被加工圆柱相对于双卡爪测头的转动自由度,让偏心回转的被加工圆柱带动双卡爪测头随被加工圆柱作跟随运动;所述装置是将双卡爪测头与V形体同轴铰接,并在二者间两端铰接气缸,用气缸的双向动作或静止实现测头靠近和远离V形体或与V形体相对固定,在V形体搭接过程对应的油缸回油路上设置转阀,转阀的阀杆与摆臂转轴同轴固定,摆臂下摆到终点前预定位置时阀杆转动到刚好关闭回油路的位置。本发明测量精度高