
一种古建筑修复支撑系统及装置.pdf

是翠****ng


1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种古建筑修复支撑系统及装置.pdf
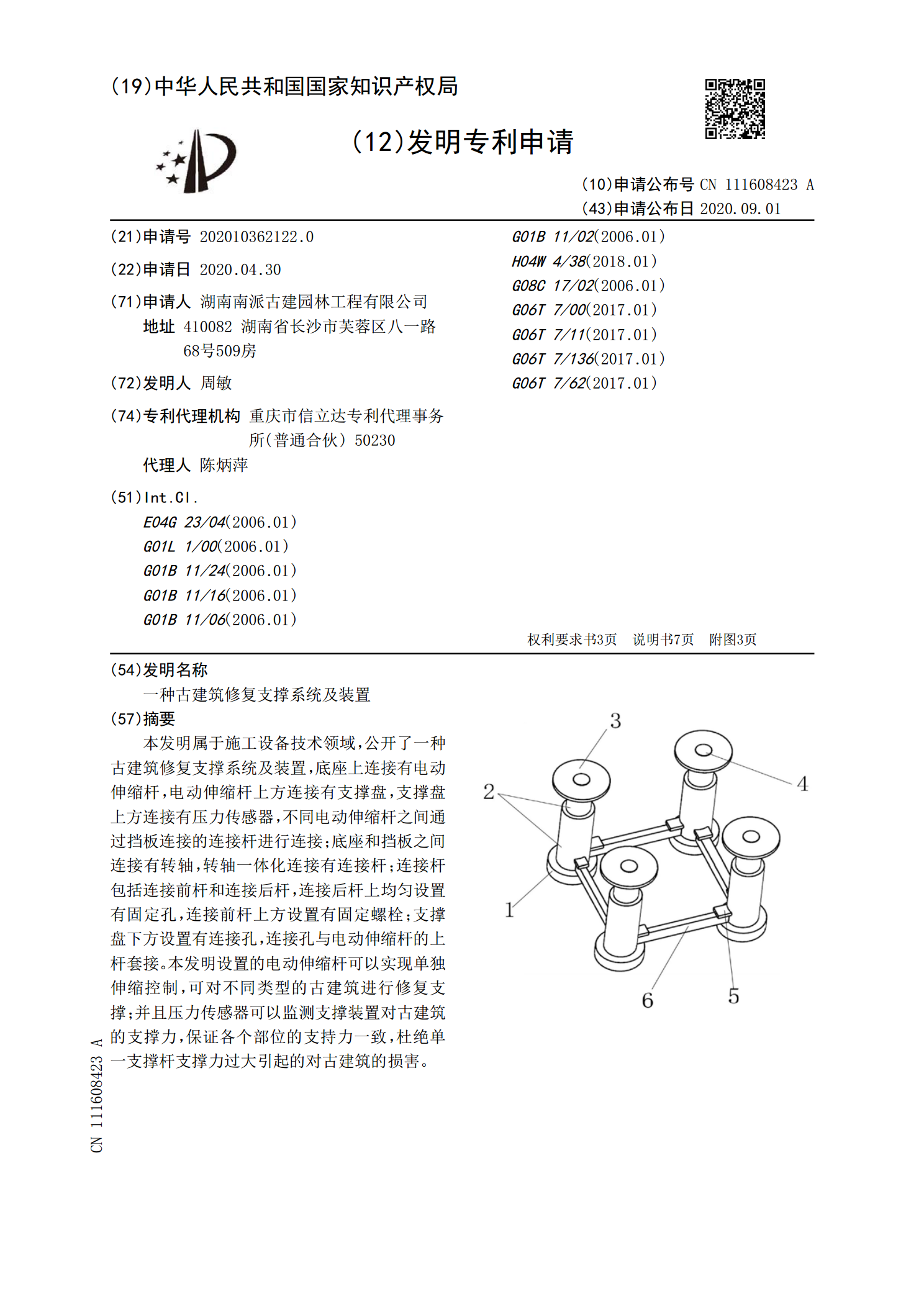
本发明属于施工设备技术领域,公开了一种古建筑修复支撑系统及装置,底座上连接有电动伸缩杆,电动伸缩杆上方连接有支撑盘,支撑盘上方连接有压力传感器,不同电动伸缩杆之间通过挡板连接的连接杆进行连接;底座和挡板之间连接有转轴,转轴一体化连接有连接杆;连接杆包括连接前杆和连接后杆,连接后杆上均匀设置有固定孔,连接前杆上方设置有固定螺栓;支撑盘下方设置有连接孔,连接孔与电动伸缩杆的上杆套接。本发明设置的电动伸缩杆可以实现单独伸缩控制,可对不同类型的古建筑进行修复支撑;并且压力传感器可以监测支撑装置对古建筑的支撑力,保
一种古建筑修复支撑装置.pdf
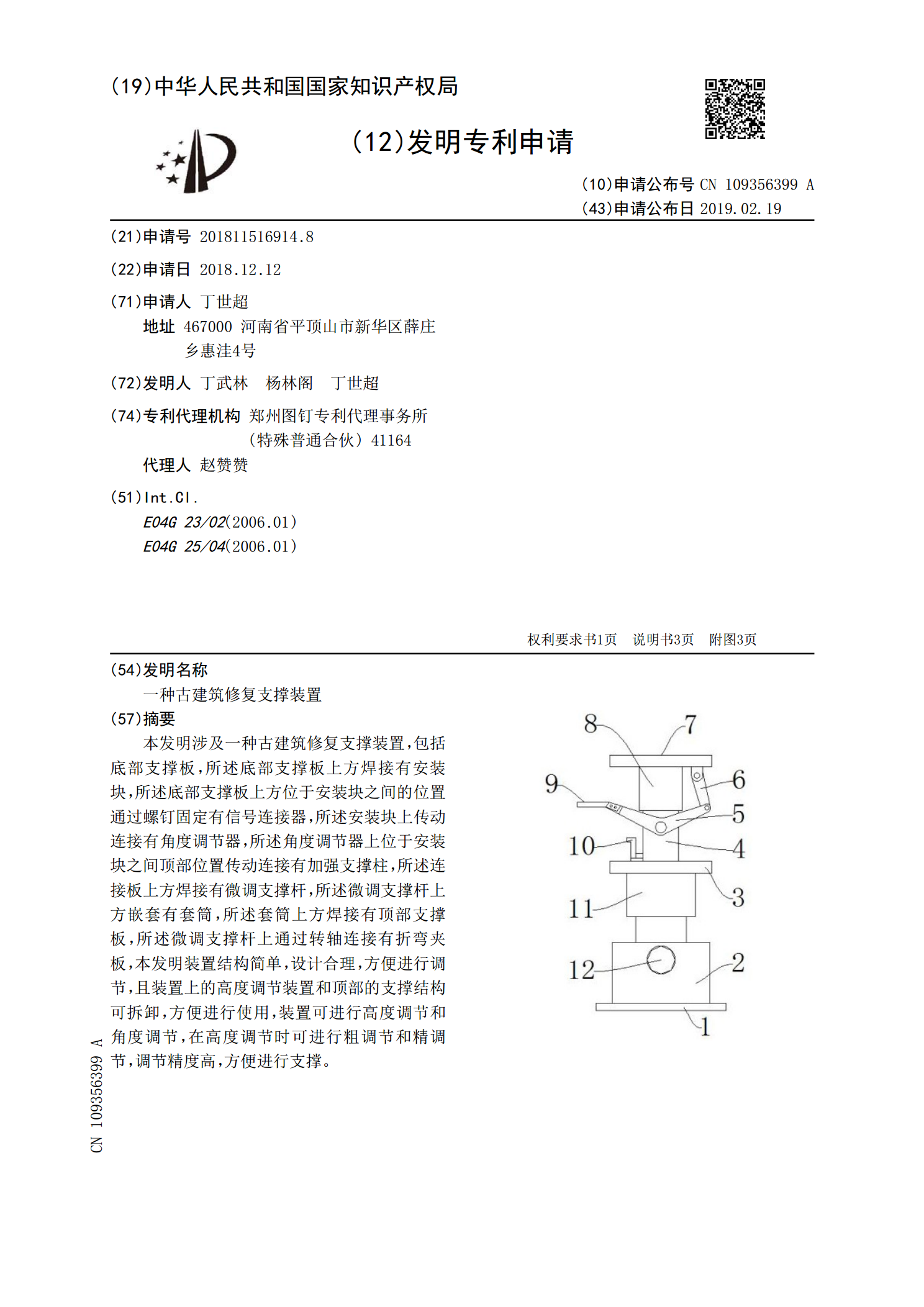
本发明涉及一种古建筑修复支撑装置,包括底部支撑板,所述底部支撑板上方焊接有安装块,所述底部支撑板上方位于安装块之间的位置通过螺钉固定有信号连接器,所述安装块上传动连接有角度调节器,所述角度调节器上位于安装块之间顶部位置传动连接有加强支撑柱,所述连接板上方焊接有微调支撑杆,所述微调支撑杆上方嵌套有套筒,所述套筒上方焊接有顶部支撑板,所述微调支撑杆上通过转轴连接有折弯夹板,本发明装置结构简单,设计合理,方便进行调节,且装置上的高度调节装置和顶部的支撑结构可拆卸,方便进行使用,装置可进行高度调节和角度调节,在高
一种古建筑修复支撑装置.pdf
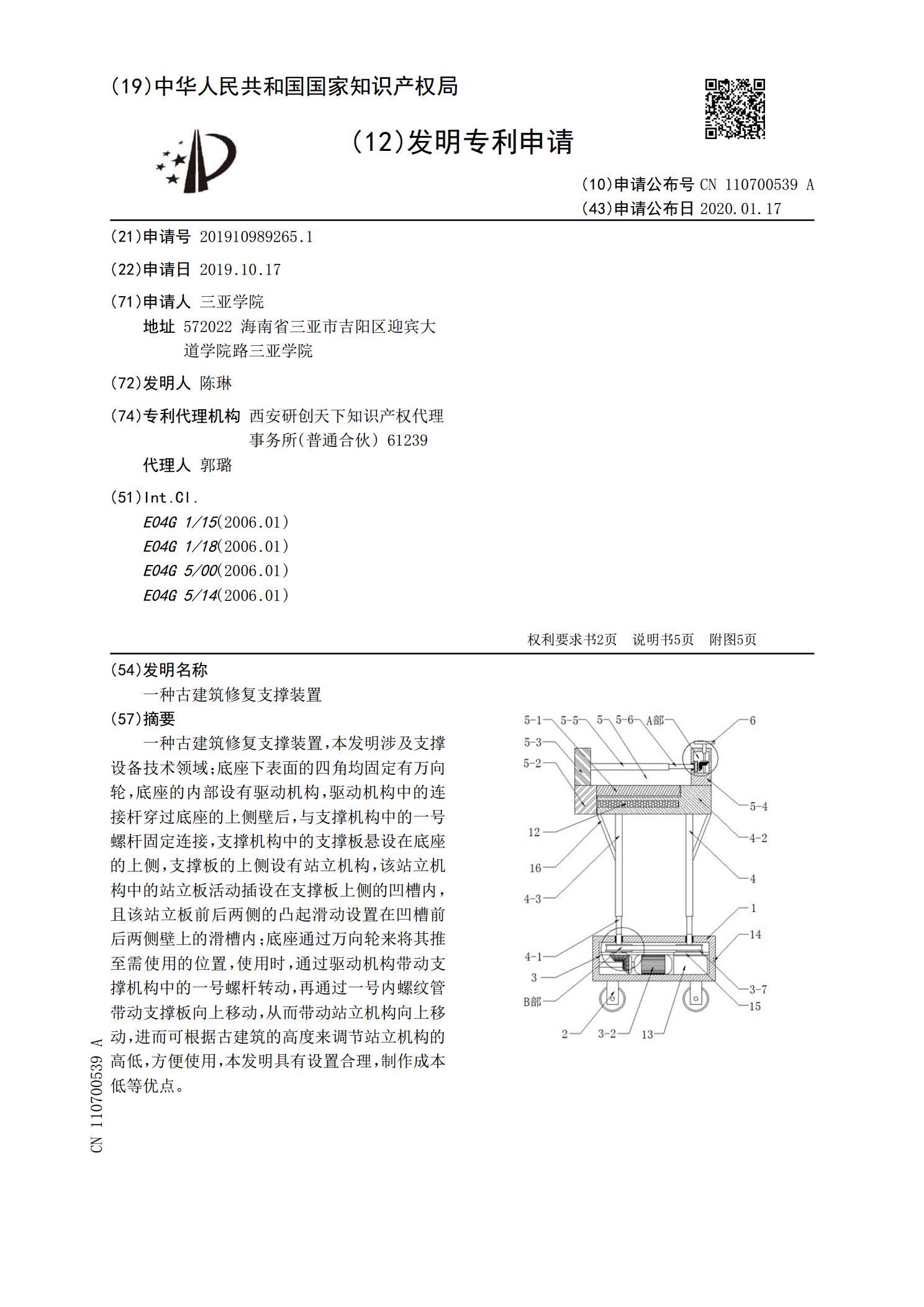
一种古建筑修复支撑装置,本发明涉及支撑设备技术领域;底座下表面的四角均固定有万向轮,底座的内部设有驱动机构,驱动机构中的连接杆穿过底座的上侧壁后,与支撑机构中的一号螺杆固定连接,支撑机构中的支撑板悬设在底座的上侧,支撑板的上侧设有站立机构,该站立机构中的站立板活动插设在支撑板上侧的凹槽内,且该站立板前后两侧的凸起滑动设置在凹槽前后两侧壁上的滑槽内;底座通过万向轮来将其推至需使用的位置,使用时,通过驱动机构带动支撑机构中的一号螺杆转动,再通过一号内螺纹管带动支撑板向上移动,从而带动站立机构向上移动,进而可根
一种古建筑修复用加固式支撑装置及方法.pdf
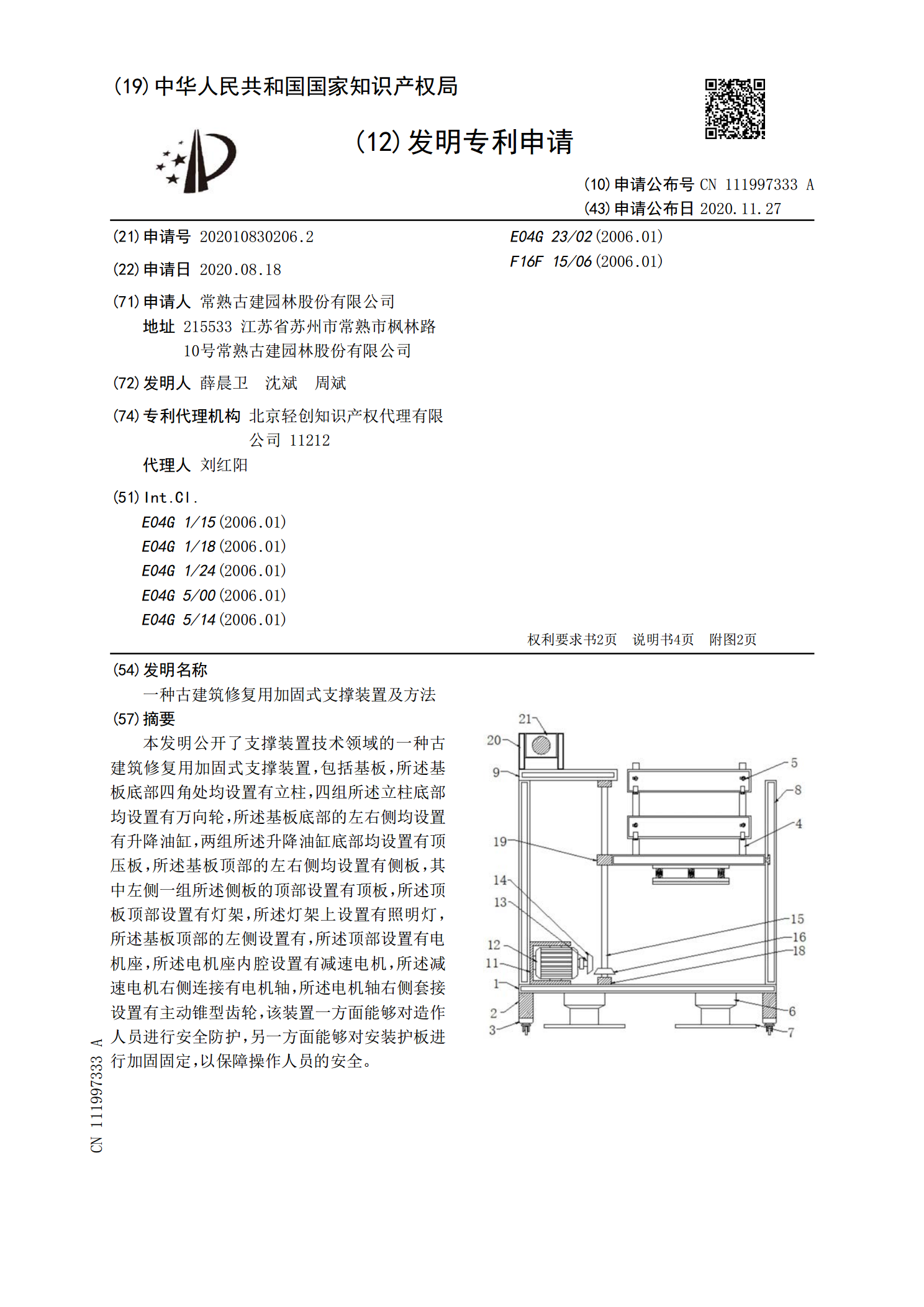
本发明公开了支撑装置技术领域的一种古建筑修复用加固式支撑装置,包括基板,所述基板底部四角处均设置有立柱,四组所述立柱底部均设置有万向轮,所述基板底部的左右侧均设置有升降油缸,两组所述升降油缸底部均设置有顶压板,所述基板顶部的左右侧均设置有侧板,其中左侧一组所述侧板的顶部设置有顶板,所述顶板顶部设置有灯架,所述灯架上设置有照明灯,所述基板顶部的左侧设置有,所述顶部设置有电机座,所述电机座内腔设置有减速电机,所述减速电机右侧连接有电机轴,所述电机轴右侧套接设置有主动锥型齿轮,该装置一方面能够对造作人员进行安全
一种古建筑修复支撑架.pdf
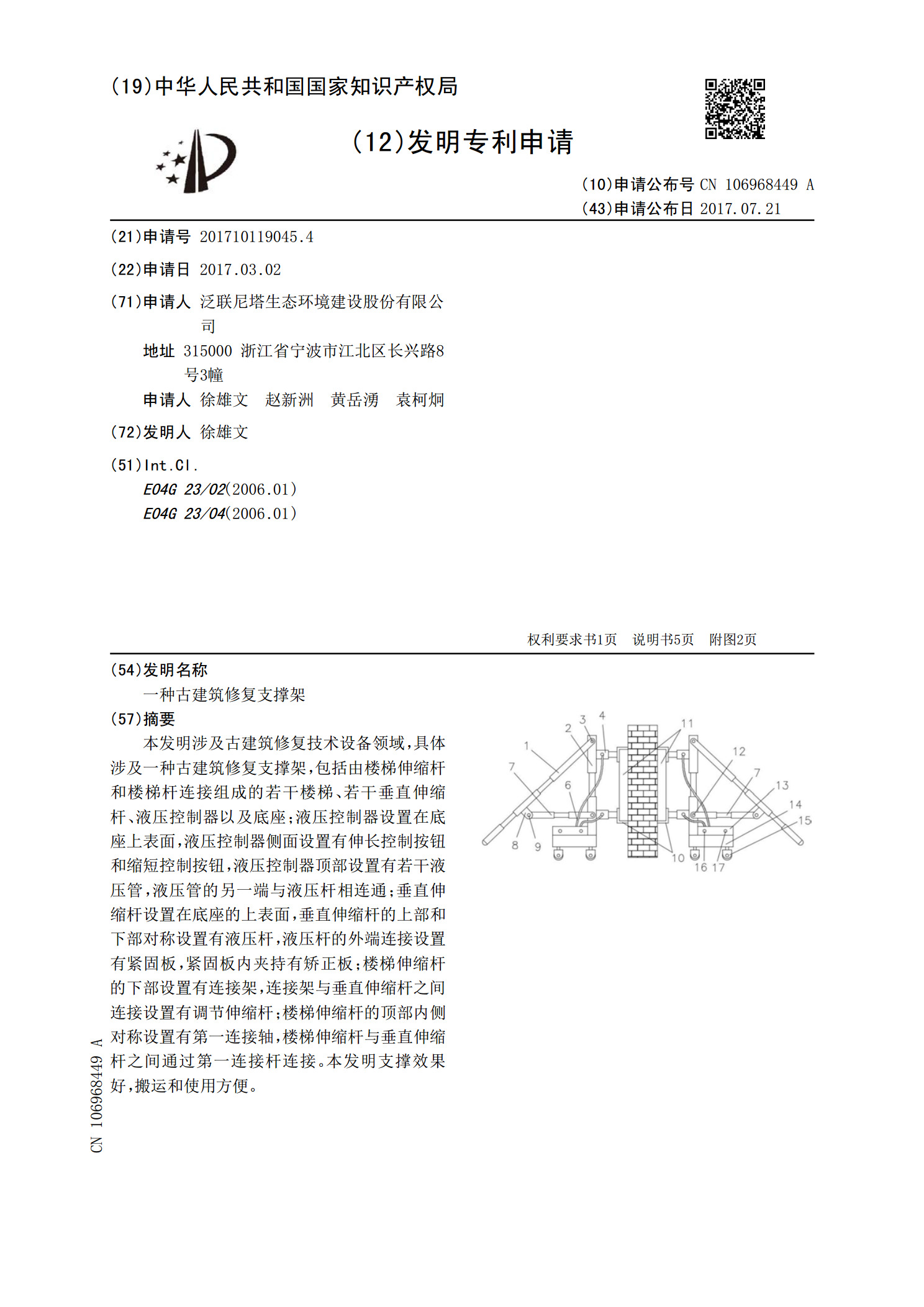
本发明涉及古建筑修复技术设备领域,具体涉及一种古建筑修复支撑架,包括由楼梯伸缩杆和楼梯杆连接组成的若干楼梯、若干垂直伸缩杆、液压控制器以及底座;液压控制器设置在底座上表面,液压控制器侧面设置有伸长控制按钮和缩短控制按钮,液压控制器顶部设置有若干液压管,液压管的另一端与液压杆相连通;垂直伸缩杆设置在底座的上表面,垂直伸缩杆的上部和下部对称设置有液压杆,液压杆的外端连接设置有紧固板,紧固板内夹持有矫正板;楼梯伸缩杆的下部设置有连接架,连接架与垂直伸缩杆之间连接设置有调节伸缩杆;楼梯伸缩杆的顶部内侧对称设置有第