
仿人柔性灵巧手及其手指关节.pdf

是你****盟主


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
仿人柔性灵巧手及其手指关节.pdf
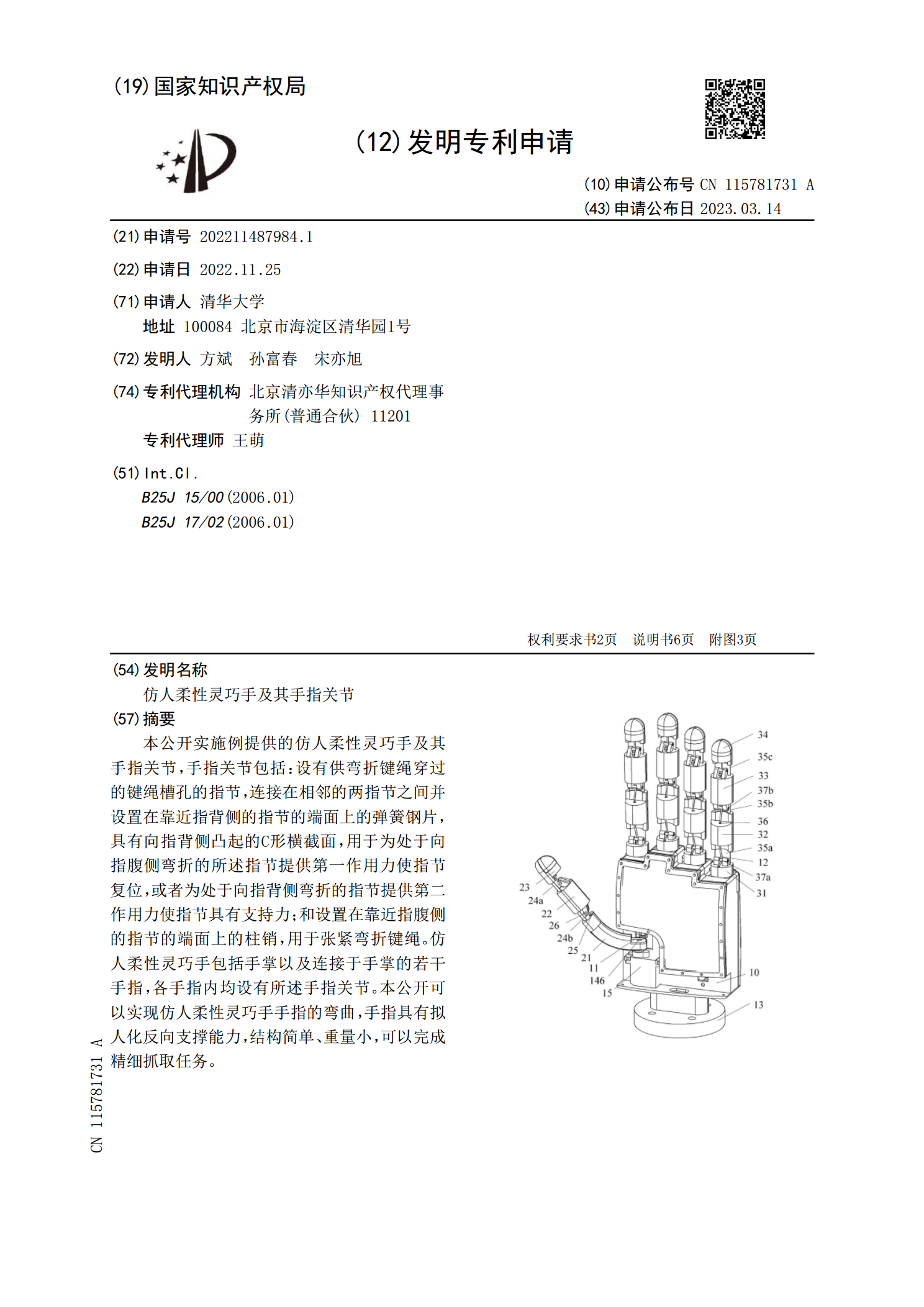
本公开实施例提供的仿人柔性灵巧手及其手指关节,手指关节包括:设有供弯折键绳穿过的键绳槽孔的指节,连接在相邻的两指节之间并设置在靠近指背侧的指节的端面上的弹簧钢片,具有向指背侧凸起的C形横截面,用于为处于向指腹侧弯折的所述指节提供第一作用力使指节复位,或者为处于向指背侧弯折的指节提供第二作用力使指节具有支持力;和设置在靠近指腹侧的指节的端面上的柱销,用于张紧弯折键绳。仿人柔性灵巧手包括手掌以及连接于手掌的若干手指,各手指内均设有所述手指关节。本公开可以实现仿人柔性灵巧手手指的弯曲,手指具有拟人化反向支撑能力

一种机器人仿人灵巧手手指的基关节.pdf
本发明公开了一种机器人仿人灵巧手手指的基关节,包括关节座、十字轴、近指段、第一主动锥齿轮、第二主动锥齿轮、从动锥齿轮、第一驱动组件和第二驱动组件,十字轴包括第一轴和第二轴,第一轴与关节座转动连接,第一主动锥齿轮和第二主动锥齿轮可转动的套设在第一轴上,从动锥齿轮套设在第二轴上且与近指段固定,近指段与第二轴转动连接,第一驱动组件的输出端与第一主动锥齿轮连接,第二驱动组件的输出端与第二主动锥齿轮连接。本发明提供了一种机器人仿人灵巧手手指的基关节,执行机构结构简单,通过腱绳、滑轮驱动的差动结构实现近指段关节仿人的

SMA人工肌肉柔性仿人灵巧手的设计与实验研究.docx
SMA人工肌肉柔性仿人灵巧手的设计与实验研究论文标题:SMA人工肌肉柔性仿人灵巧手的设计与实验研究摘要:随着机器人技术的不断发展,人工肌肉逐渐成为研究的热点之一。在本研究中,我们设计和实验了一种基于形状记忆合金(SMA)的人工肌肉柔性仿人灵巧手。首先,我们介绍了SMA材料的特点以及其在机器人领域的应用潜力。然后,我们详细描述了人工肌肉的设计原理和结构,包括SMA线材的选择、气动系统的设计和控制方法。接下来,我们进行了一系列实验,验证了该人工肌肉的灵活性和灵巧性。实验结果表明,人工肌肉能够实现精细的控制和多

基于肌电控制的柔性仿人灵巧手研究的开题报告.docx
基于肌电控制的柔性仿人灵巧手研究的开题报告一、研究背景随着科技的不断发展,人类对于制造仿人机器人的兴趣也日益增加,仿人机器人灵巧手的机械结构和控制系统也得到了不断地完善。仿人机器人的手部在实现人机互动、搬运、抓取、操作等方面,拥有很大的潜力和应用前景。而开发灵巧手和掌握其控制技术则是实现仿人机器人高度智能化的必要手段之一。肌电控制是一种测量肌肉电位、并将其转化为实时控制信号的技术。肌电信号直接反映出肌肉的收缩情况,因此肌电控制技术被广泛应用于柔性机械手的控制中。采用肌电控制技术可以实现更加自然的控制方式,

仿人机器人可变刚度柔性关节设计.pdf
本发明公开了一种仿人机器人可变刚度柔性关节,主要包括可变柔性关节驱动器、2D差分驱动关节机构。所述的可变柔性关节驱动器,主要包括微型驱动单元、电机支架、弹性单元。所述的2D差分驱动关节,主要包括柔索输入轮、输出轮、柔索。其特征在于:所述的可变刚度柔性关节驱动器,引入特殊弹性元件,刚性可变,以适应不同步行阶段关节刚度需要,并且能够存储/释放能量和吸收冲击;所述的可变柔性关节驱动器通过柔索与2-DOF差分驱动关节机构相连,无冗余驱动;采所述的2-DOF差分机构,采用柔索传动,较齿轮设计,结构简单,摩擦小,无回