
一种智能登高助力装置及其登高方法.pdf

玉环****找我

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能登高助力装置及其登高方法.pdf
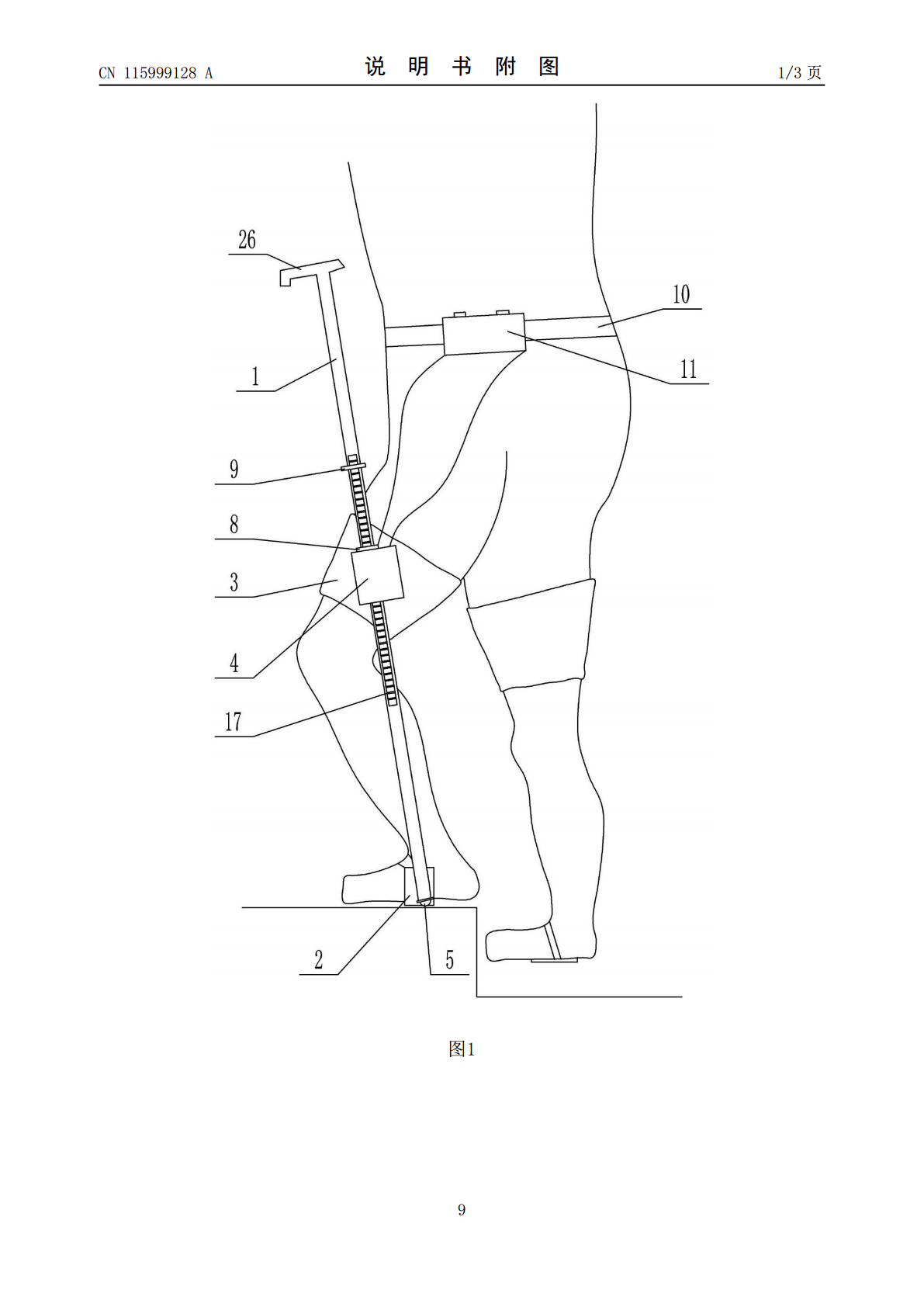
本发明公开一种智能登高助力装置及其登高方法,涉及登高辅助装置技术领域,包括支撑杆、脚托、腿部固定带和动力盒,动力盒中设置有与支撑杆传动连接并能够沿支撑杆移动的驱动机构,支撑杆的底端设置有第一接触开关,第一接触开关具有触地端和弹性复位件,触地端触地后,第一接触开关导通;动力盒的顶部设置有第二接触开关,支撑杆上设置有接触端;本发明通过设置支撑杆和铰接在腿部固定带上的动力盒,能够在人体迈步登高后的直立过程中,利用驱动机构提供的举升力,降低膝关节、大腿负重,辅助下肢发力使人体直立;同时通过设置第一接触开关和第二接
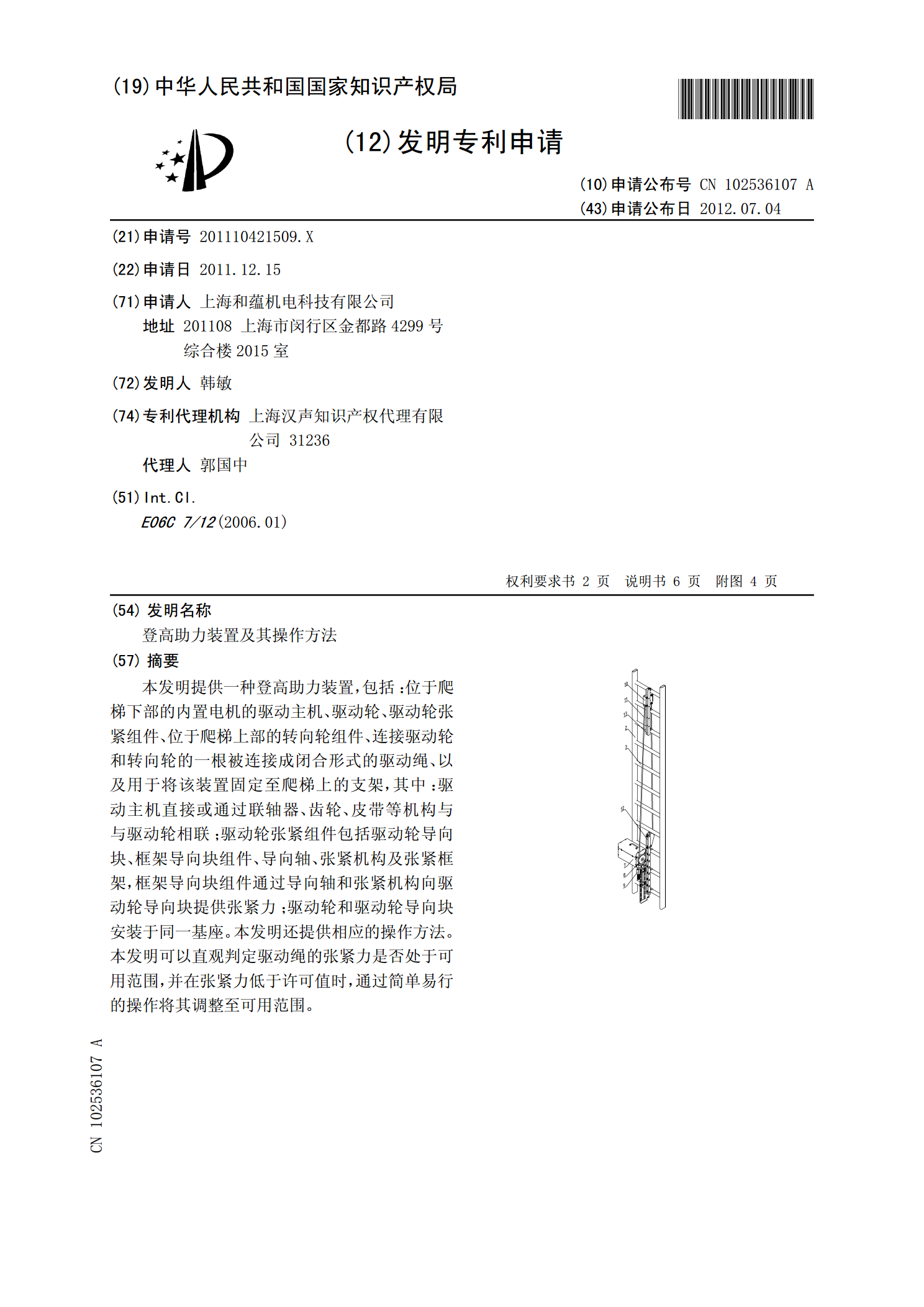
登高助力装置及其操作方法.pdf
本发明提供一种登高助力装置,包括:位于爬梯下部的内置电机的驱动主机、驱动轮、驱动轮张紧组件、位于爬梯上部的转向轮组件、连接驱动轮和转向轮的一根被连接成闭合形式的驱动绳、以及用于将该装置固定至爬梯上的支架,其中:驱动主机直接或通过联轴器、齿轮、皮带等机构与与驱动轮相联;驱动轮张紧组件包括驱动轮导向块、框架导向块组件、导向轴、张紧机构及张紧框架,框架导向块组件通过导向轴和张紧机构向驱动轮导向块提供张紧力;驱动轮和驱动轮导向块安装于同一基座。本发明还提供相应的操作方法。本发明可以直观判定驱动绳的张紧力是否处于可
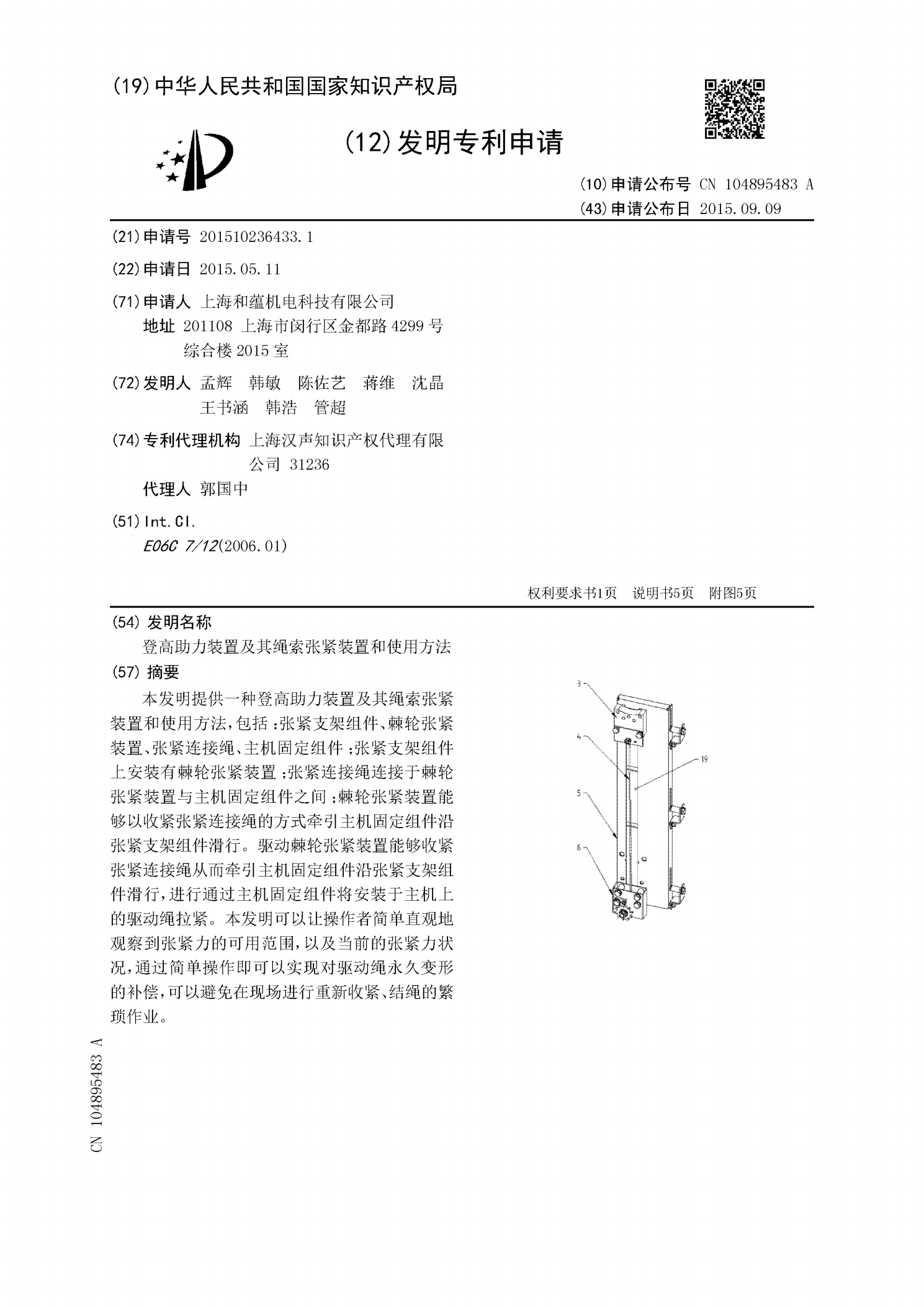
登高助力装置及其绳索张紧装置和使用方法.pdf
本发明提供一种登高助力装置及其绳索张紧装置和使用方法,包括:张紧支架组件、棘轮张紧装置、张紧连接绳、主机固定组件;张紧支架组件上安装有棘轮张紧装置;张紧连接绳连接于棘轮张紧装置与主机固定组件之间;棘轮张紧装置能够以收紧张紧连接绳的方式牵引主机固定组件沿张紧支架组件滑行。驱动棘轮张紧装置能够收紧张紧连接绳从而牵引主机固定组件沿张紧支架组件滑行,进行通过主机固定组件将安装于主机上的驱动绳拉紧。本发明可以让操作者简单直观地观察到张紧力的可用范围,以及当前的张紧力状况,通过简单操作即可以实现对驱动绳永久变形的补偿

一种用于爬坡登高的助力装置.pdf
本发明公开一种用于爬坡登高的助力装置,包括鞋底、鞋托、电源、电缸、控制模块和接触开关。鞋底前端向上凸伸有一前板,前板上端与鞋托前端通过销轴活动连接。鞋底设置有鞋底铰支座,电缸一端通过鞋底销轴与鞋底活动连接,电缸另一端具有电缸杆。鞋托设置有鞋托铰支座,电缸杆通过鞋托销轴与鞋托活动连接。接触开关设置于鞋底下表面。在工作时,当穿戴此装置的人在楼梯台阶行走或爬坡时,其中一只脚的鞋底接触地面,接触开关被接通,控制模块给出信号使电缸伸长电缸杆进而使鞋托后部逐渐升起,当抬脚时,接触开关被断开,控制模块使电缸缩短电缸杆进
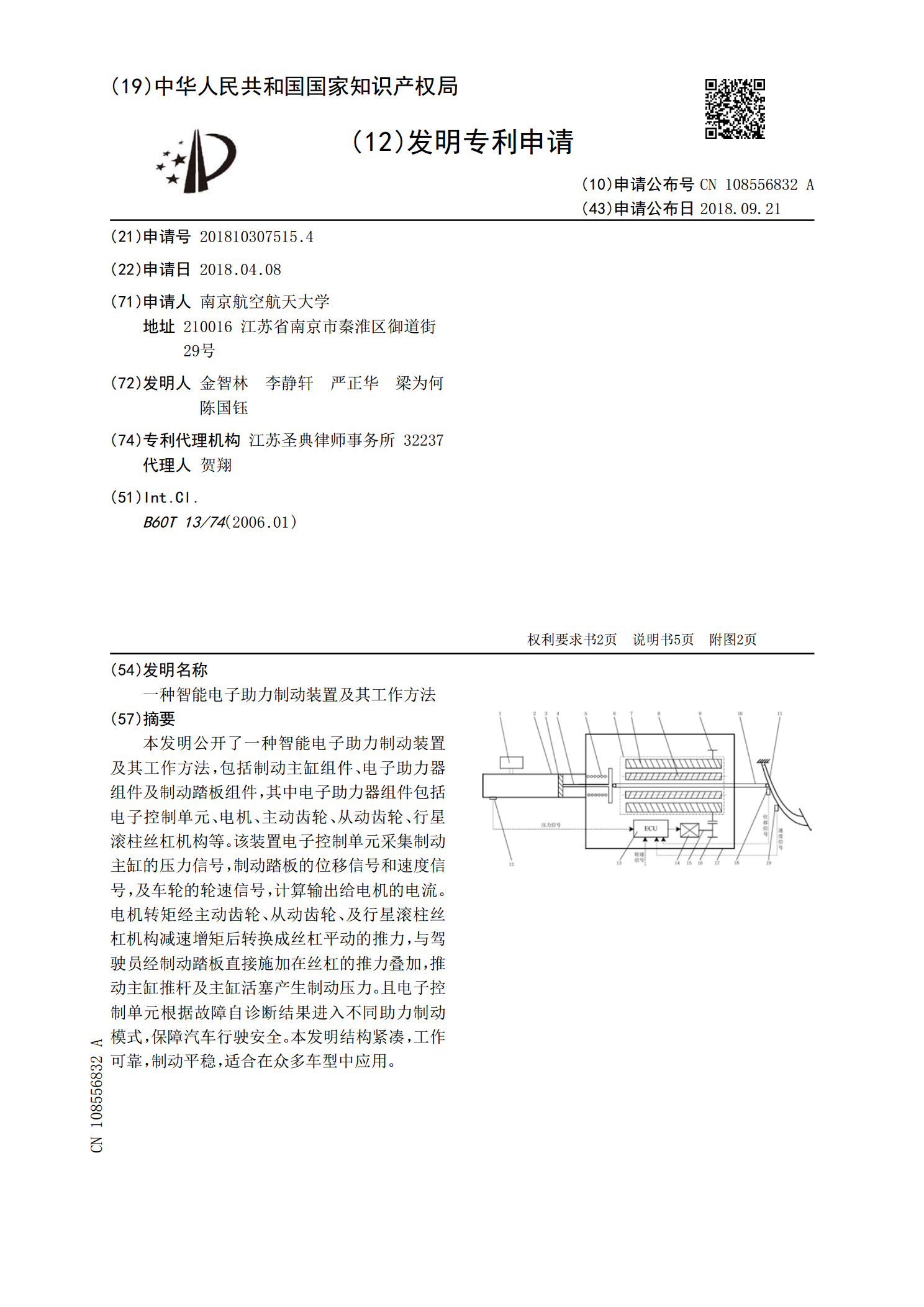
一种智能电子助力制动装置及其工作方法.pdf
本发明公开了一种智能电子助力制动装置及其工作方法,包括制动主缸组件、电子助力器组件及制动踏板组件,其中电子助力器组件包括电子控制单元、电机、主动齿轮、从动齿轮、行星滚柱丝杠机构等。该装置电子控制单元采集制动主缸的压力信号,制动踏板的位移信号和速度信号,及车轮的轮速信号,计算输出给电机的电流。电机转矩经主动齿轮、从动齿轮、及行星滚柱丝杠机构减速增矩后转换成丝杠平动的推力,与驾驶员经制动踏板直接施加在丝杠的推力叠加,推动主缸推杆及主缸活塞产生制动压力。且电子控制单元根据故障自诊断结果进入不同助力制动模式,保障