
基于自适应无迹卡尔曼滤波的无人船参数在线辨识方法.pdf

戊午****jj


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于自适应无迹卡尔曼滤波的无人船参数在线辨识方法.pdf
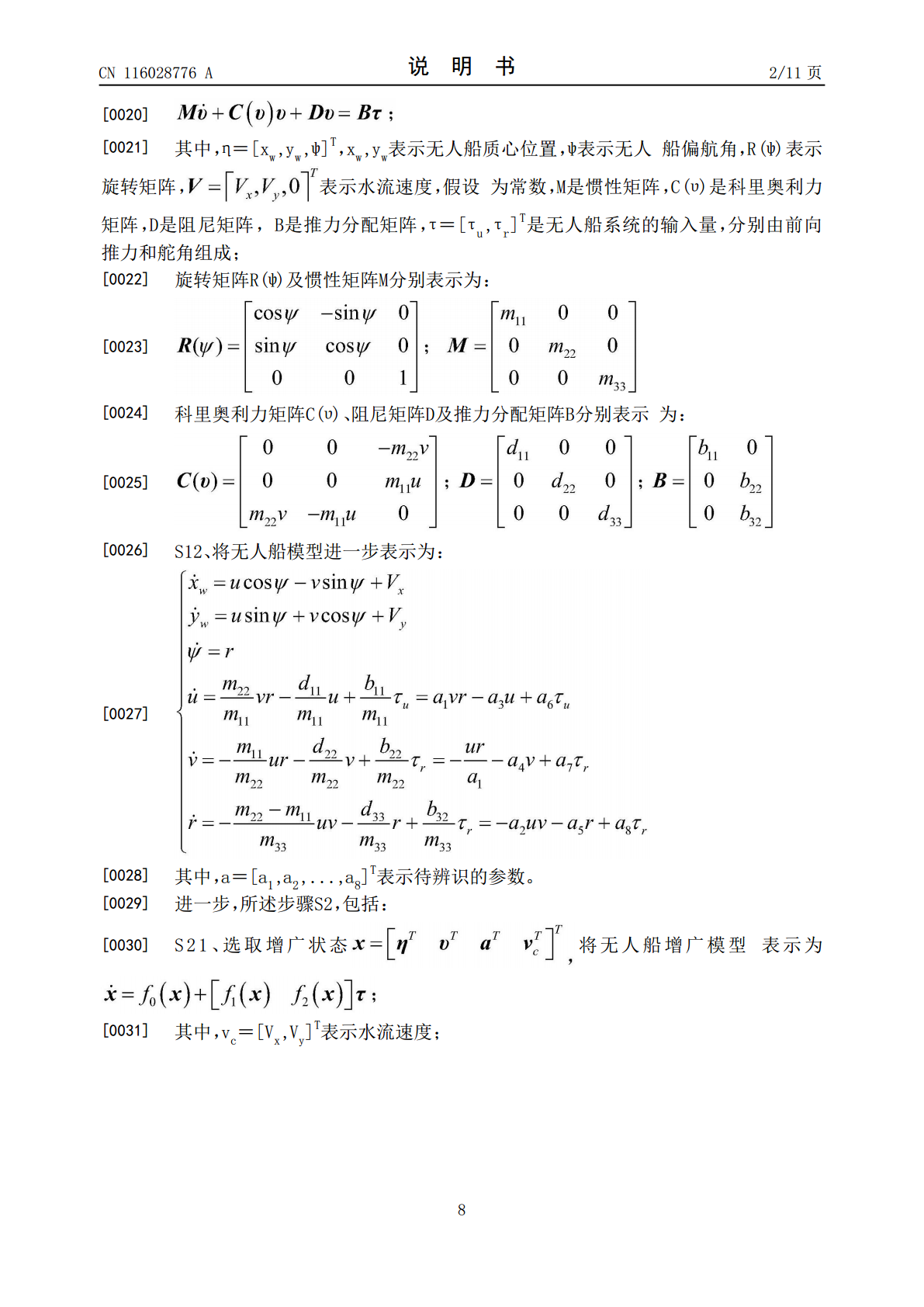
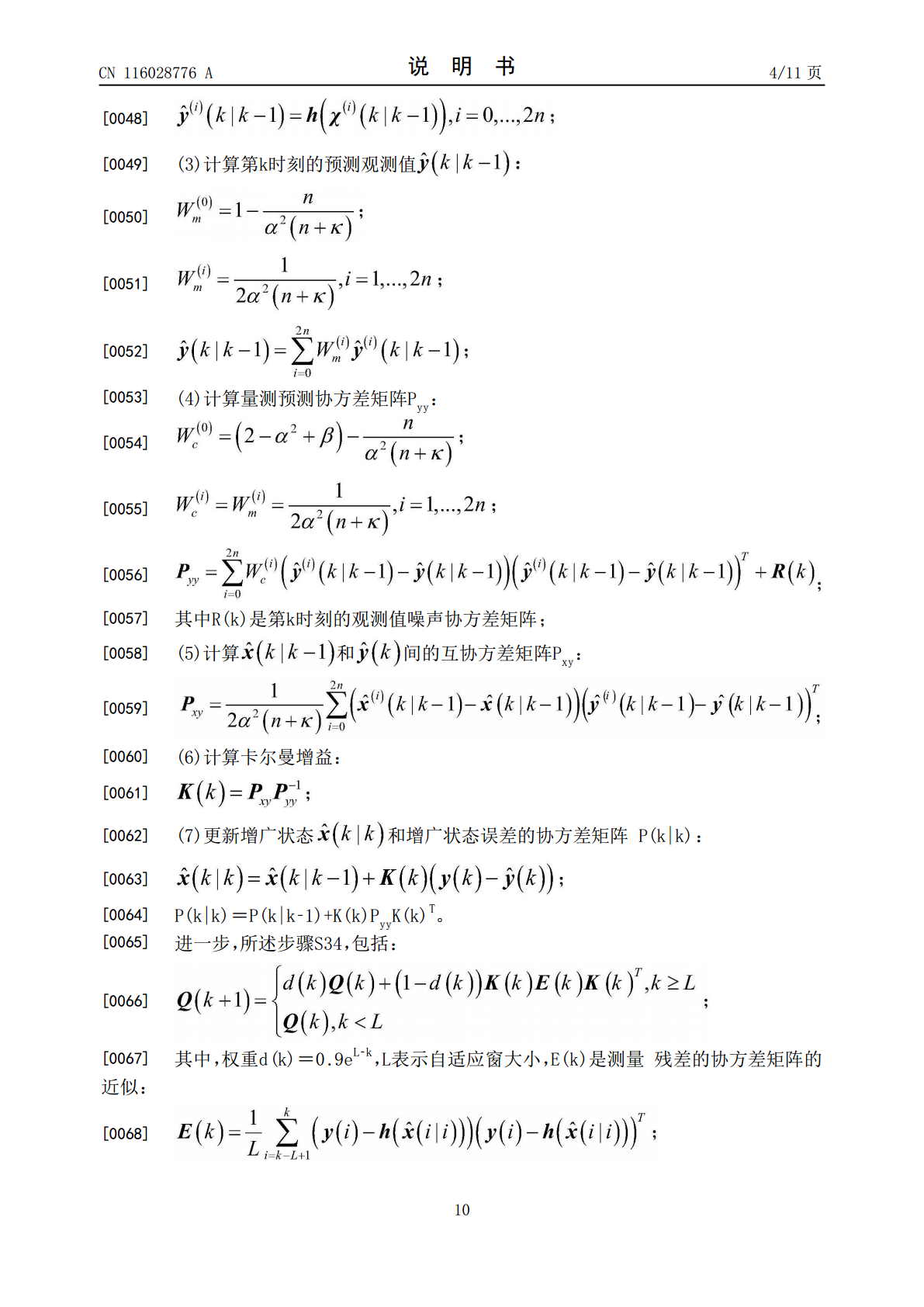
本发明公开了一种基于自适应无迹卡尔曼滤波的无人船参数在线辨识方法,包括步骤:S1、根据无人船动力学方程,构建待辨识的无人船模型;S2、以待辨识的无人船模型参数作为增广状态,将待辨识的无人船模型扩展为增广模型;S3、采用自适应无迹卡尔曼滤波在线估计增广状态,获得无人船模型参数。步骤S3包括:S31、初始化自适应无迹卡尔曼滤波;S32、获取增广模型输入和输出数据;S33、更新增广状态和增广状态误差的协方差矩阵;S34、自适应估计过程噪声协方差矩阵;S35、预测增广状态和增广状态误差的协方差矩阵;S36、判断是

基于无迹卡尔曼滤波的飞机结冰辨识.docx
基于无迹卡尔曼滤波的飞机结冰辨识基于无迹卡尔曼滤波的飞机结冰辨识摘要:飞行中的结冰对飞机的飞行性能和安全造成了严重影响,因此准确和及时地辨识飞机的结冰情况对飞行安全至关重要。本文提出了一种基于无迹卡尔曼滤波的飞机结冰辨识方法。首先,介绍了飞机结冰的原因和危害。然后,详细介绍了无迹卡尔曼滤波算法及其原理。接着,给出了飞机结冰辨识的流程和相关参数。最后,通过实验验证了该方法的有效性和准确性。关键词:无迹卡尔曼滤波、飞机结冰、辨识、飞行安全引言飞行中的结冰是指飞机在低温环境中,空气中的水蒸气直接凝结在飞机的表面

基于无迹卡尔曼滤波的光学电流互感器的参数辨识.docx
基于无迹卡尔曼滤波的光学电流互感器的参数辨识摘要:本文基于无迹卡尔曼滤波技术,提出了一种用于光学电流互感器参数辨识的方法,对于各种常见的电力设备故障检测具有高精度和实时性的要求,具有很好的应用前景。文章首先介绍了光学电流互感器的工作原理以及其在电力设备中的应用,随后详细描述了无迹卡尔曼滤波算法的基本原理和实现过程,最后,通过仿真实验验证了该方法的有效性。关键词:无迹卡尔曼滤波,光学电流互感器,参数辨识,电力设备故障检测一、引言随着电力设备的不断升级和人们对电力安全的要求越来越高,电力设备故障检测的准确性和
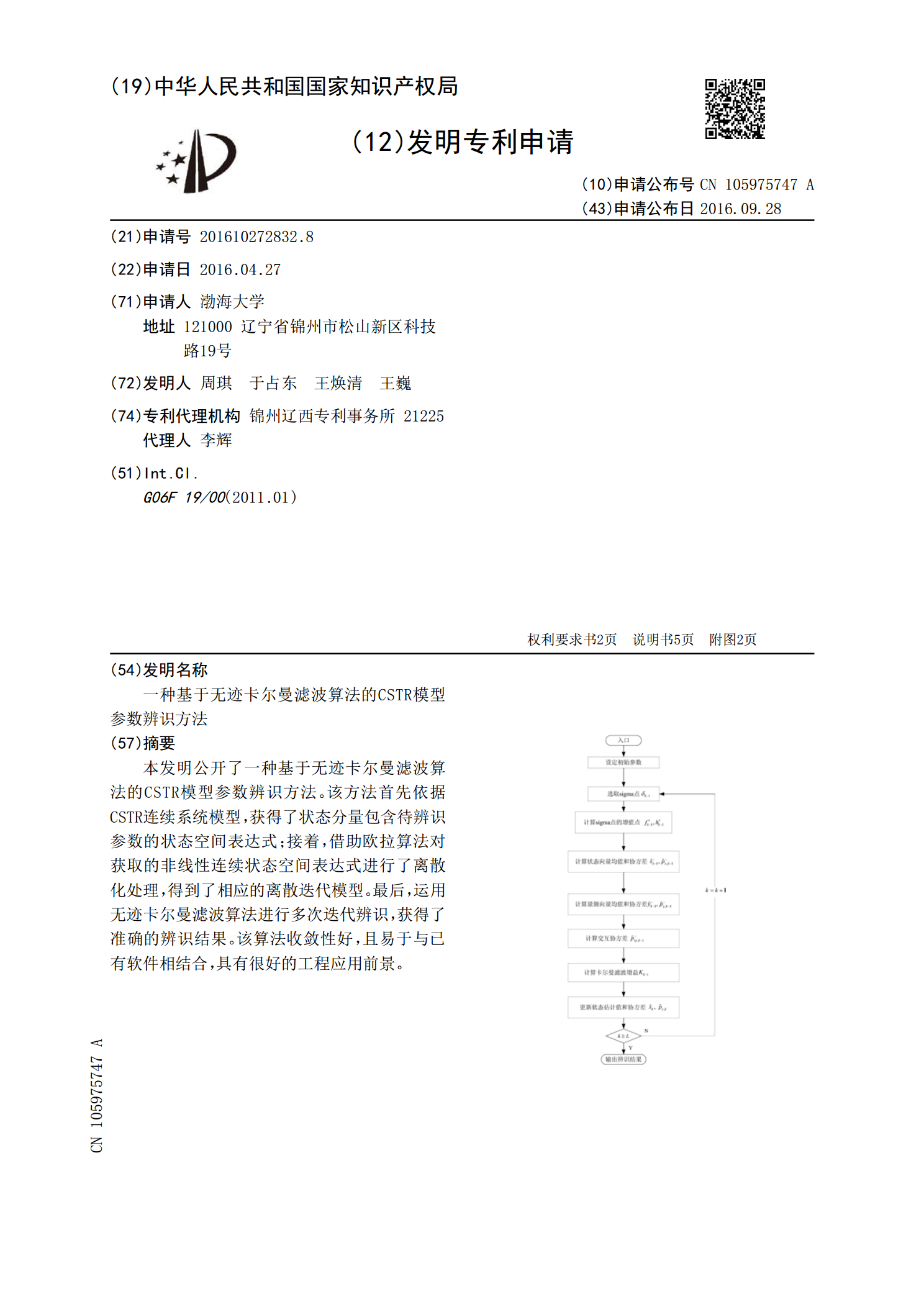
一种基于无迹卡尔曼滤波算法的CSTR模型参数辨识方法.pdf
本发明公开了一种基于无迹卡尔曼滤波算法的CSTR模型参数辨识方法。该方法首先依据CSTR连续系统模型,获得了状态分量包含待辨识参数的状态空间表达式;接着,借助欧拉算法对获取的非线性连续状态空间表达式进行了离散化处理,得到了相应的离散迭代模型。最后,运用无迹卡尔曼滤波算法进行多次迭代辨识,获得了准确的辨识结果。该算法收敛性好,且易于与已有软件相结合,具有很好的工程应用前景。

基于无迹卡尔曼滤波的光学电流互感器的参数辨识的任务书.docx
基于无迹卡尔曼滤波的光学电流互感器的参数辨识的任务书一、任务背景随着电力系统运行水平的不断提高,电力使用对精度要求不断提高,因此电力仪表的精度和稳定性也得到了更高水平的要求。其中,光学电流互感器是一种新型电力互感器,具有精度高、体积小、重量轻、功耗低等优点。其工作原理是通过电流与磁场的相互作用,将电流信号转化为光学信号传输,再通过光学解调得到所需电信号。但是,由于环境因素以及光学电流互感器内部结构等因素的影响,其参数可能发生漂移,导致电信号输出的精度下降甚至失效。因此,针对光学电流互感器进行参数辨识,进而