
一种基于神经网络的舵机模型构建方法和系统.pdf

书生****萌哒

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于神经网络的舵机模型构建方法和系统.pdf
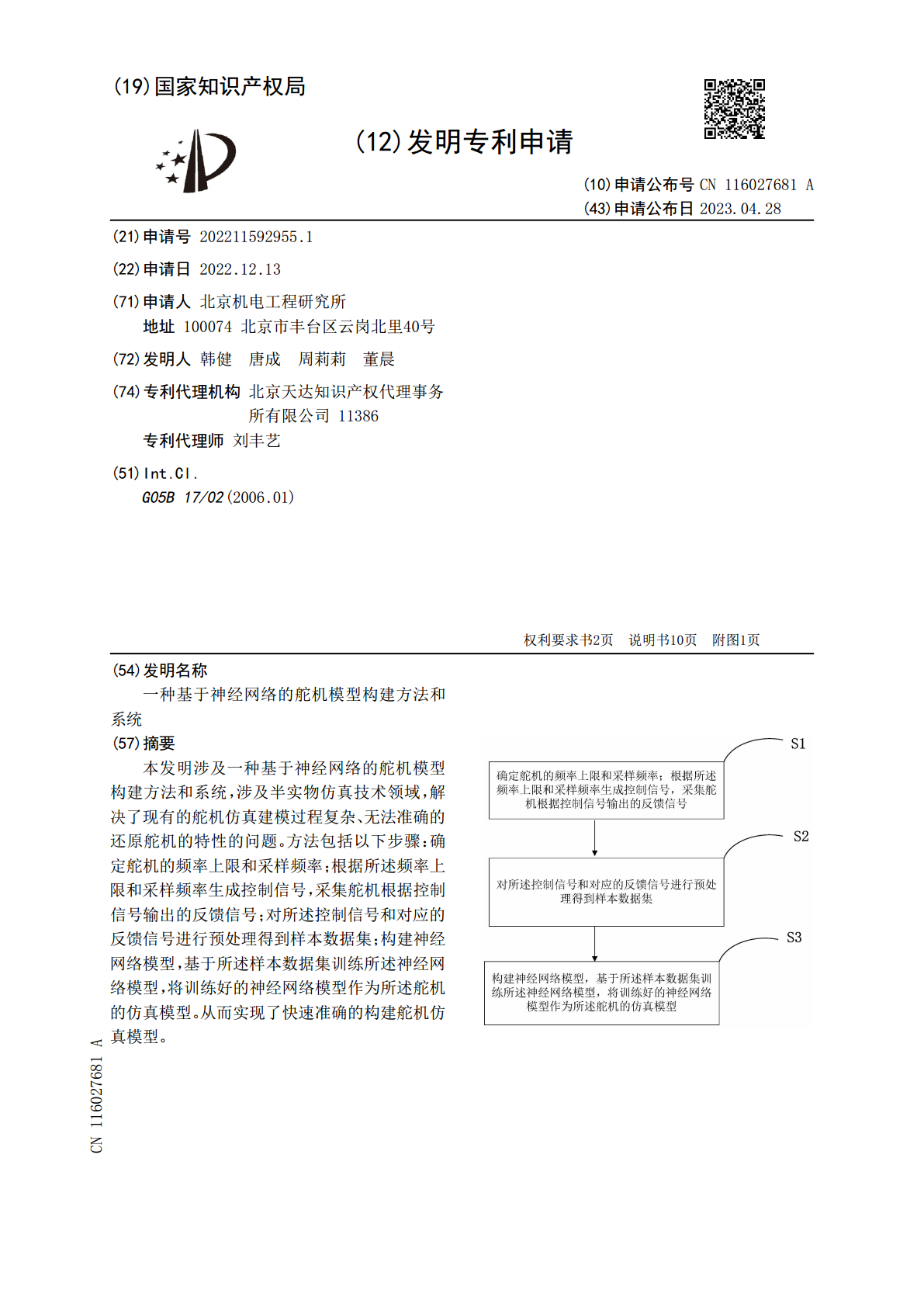
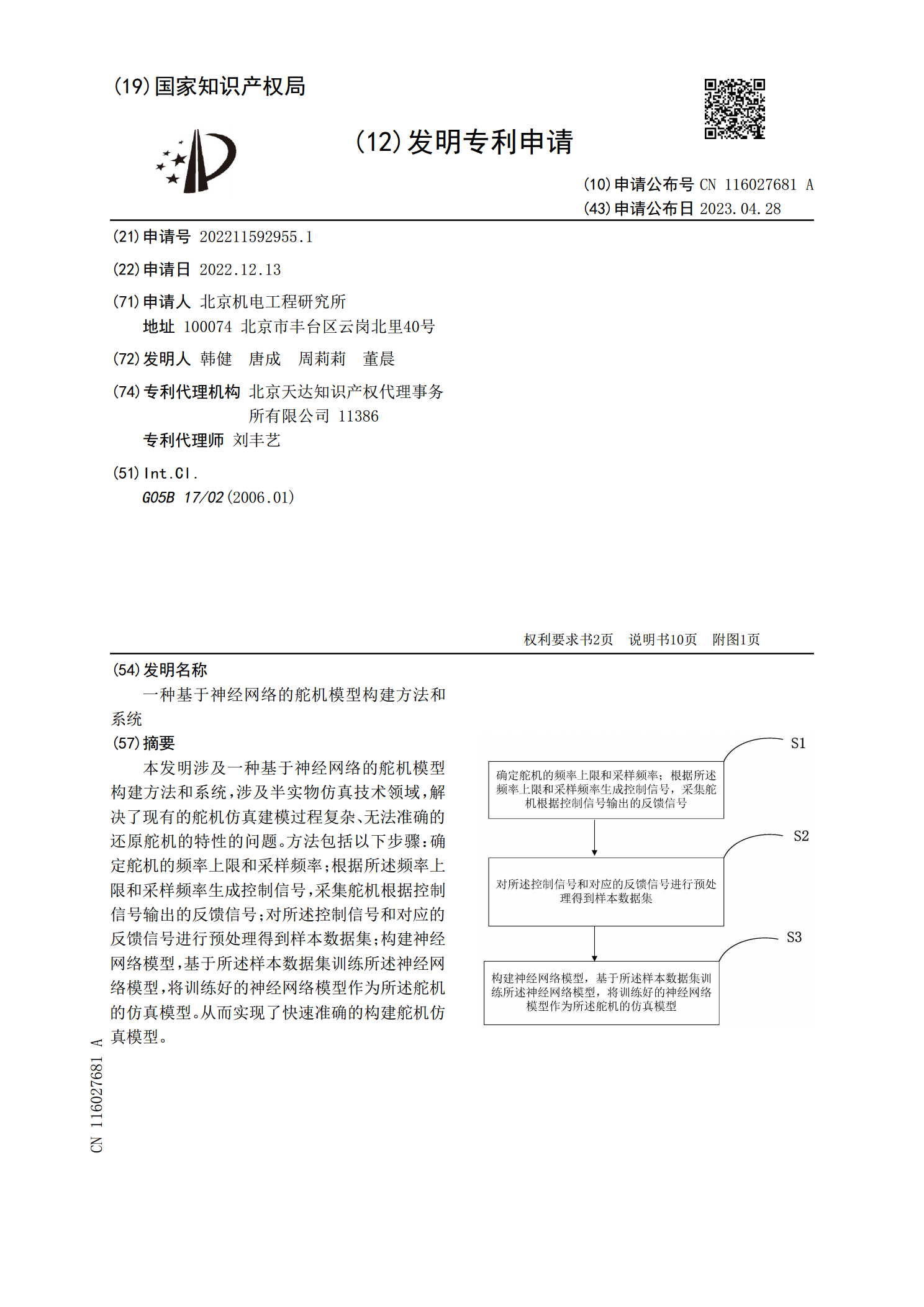
本发明涉及一种基于神经网络的舵机模型构建方法和系统,涉及半实物仿真技术领域,解决了现有的舵机仿真建模过程复杂、无法准确的还原舵机的特性的问题。方法包括以下步骤:确定舵机的频率上限和采样频率;根据所述频率上限和采样频率生成控制信号,采集舵机根据控制信号输出的反馈信号;对所述控制信号和对应的反馈信号进行预处理得到样本数据集;构建神经网络模型,基于所述样本数据集训练所述神经网络模型,将训练好的神经网络模型作为所述舵机的仿真模型。从而实现了快速准确的构建舵机仿真模型。

基于区域模型及神经网络方法构建人脸检测系统的任务书.docx
基于区域模型及神经网络方法构建人脸检测系统的任务书任务名称:基于区域模型及神经网络方法构建人脸检测系统任务目的:通过构建一个基于区域模型及神经网络方法的人脸检测系统,实现对图片或视频中的人脸进行准确并实时的检测,应用于人脸识别和安全监控等场景。任务描述:1.确定任务要求:通过调研市场需求和技术现状,确定本任务需要实现的功能、性能指标和数据集等要求,制定详细的任务计划和进度安排。2.数据集准备:收集合适的数据集,包括有标注的人脸数据集、无标注的背景数据集、带噪声的数据集,以及训练集、验证集和测试集等。3.特
一种基于深度神经网络的回归分析模型构建方法.pdf
本发明公开了一种基于深度神经网络的回归分析模型构建方法,并将其应用到光学分子成像领域。本发明的主要研究成果如下:(1)提出基于深度神经网络的回归分析模型,克服了人工智能方法只能在同一个网格上进行目标重建的限制,实现了由不同结构的网格产生的生物组织表面光分布信息到光源信息的重建;(2)提出基于点云技术的研究方法,克服了传统重建方法中重建出的光源形状受限于网格剖分情况的限制,实现了光源在形态学上的高精度重建。本发明在医学分子影像、重建方法等领域有重要的应用价值。

操作模型构建系统和操作模型构建方法.pdf
操作模型构建系统和操作模型构建方法。一种操作模型构建系统包括:数据获取单元,该数据获取单元获取移动体的操作数据和外部环境数据;关联数据累积单元,该关联数据累积单元累积通过将所述外部环境数据分类为多个项目并且使所述操作数据与相应的项目关联而获得的关联数据;以及操作模型构建单元,该操作模型构建单元基于所述关联数据来构建用于操作所述移动体的多个操作模型。
一种基于神经网络模型的毛囊识别和提取方法及系统.pdf
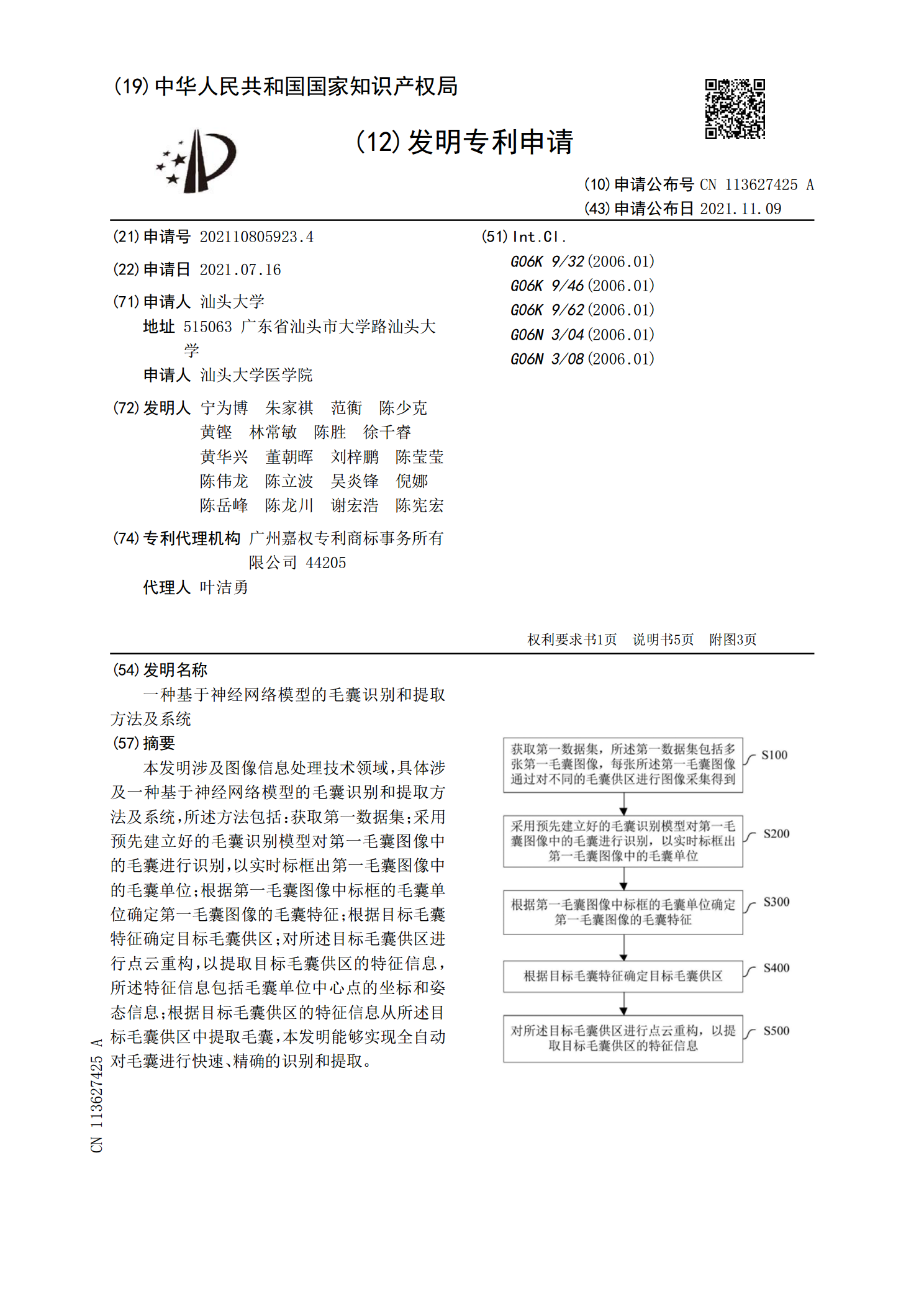
本发明涉及图像信息处理技术领域,具体涉及一种基于神经网络模型的毛囊识别和提取方法及系统,所述方法包括:获取第一数据集;采用预先建立好的毛囊识别模型对第一毛囊图像中的毛囊进行识别,以实时标框出第一毛囊图像中的毛囊单位;根据第一毛囊图像中标框的毛囊单位确定第一毛囊图像的毛囊特征;根据目标毛囊特征确定目标毛囊供区;对所述目标毛囊供区进行点云重构,以提取目标毛囊供区的特征信息,所述特征信息包括毛囊单位中心点的坐标和姿态信息;根据目标毛囊供区的特征信息从所述目标毛囊供区中提取毛囊,本发明能够实现全自动对毛囊进行快速