
一种基于多方安全计算的模型训练方法和系统.pdf

冬易****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多方安全计算的模型训练方法和系统.pdf
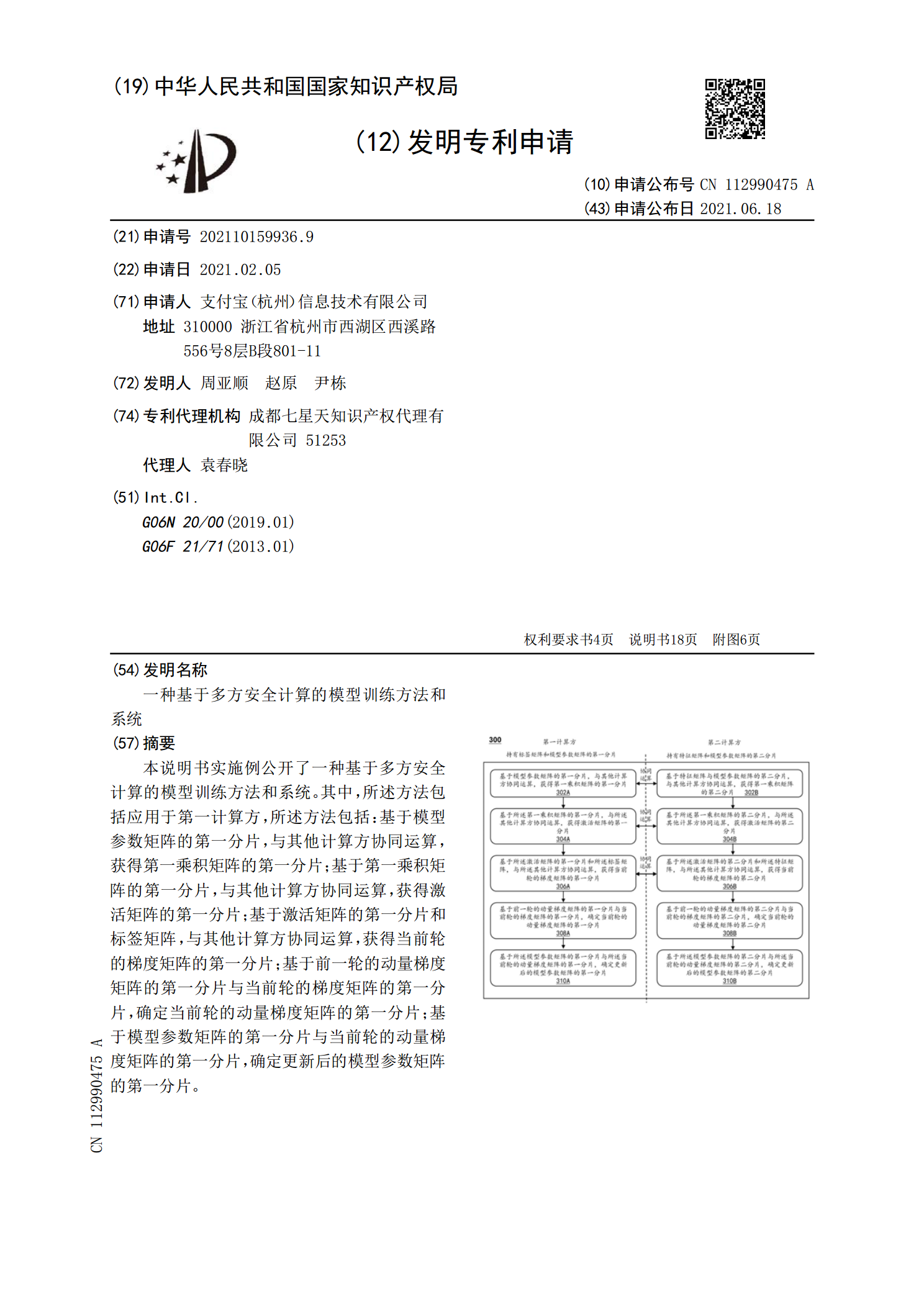
本说明书实施例公开了一种基于多方安全计算的模型训练方法和系统。其中,所述方法包括应用于第一计算方,所述方法包括:基于模型参数矩阵的第一分片,与其他计算方协同运算,获得第一乘积矩阵的第一分片;基于第一乘积矩阵的第一分片,与其他计算方协同运算,获得激活矩阵的第一分片;基于激活矩阵的第一分片和标签矩阵,与其他计算方协同运算,获得当前轮的梯度矩阵的第一分片;基于前一轮的动量梯度矩阵的第一分片与当前轮的梯度矩阵的第一分片,确定当前轮的动量梯度矩阵的第一分片;基于模型参数矩阵的第一分片与当前轮的动量梯度矩阵的第一分片
一种基于多方安全计算的多分类模型训练方法和系统.pdf
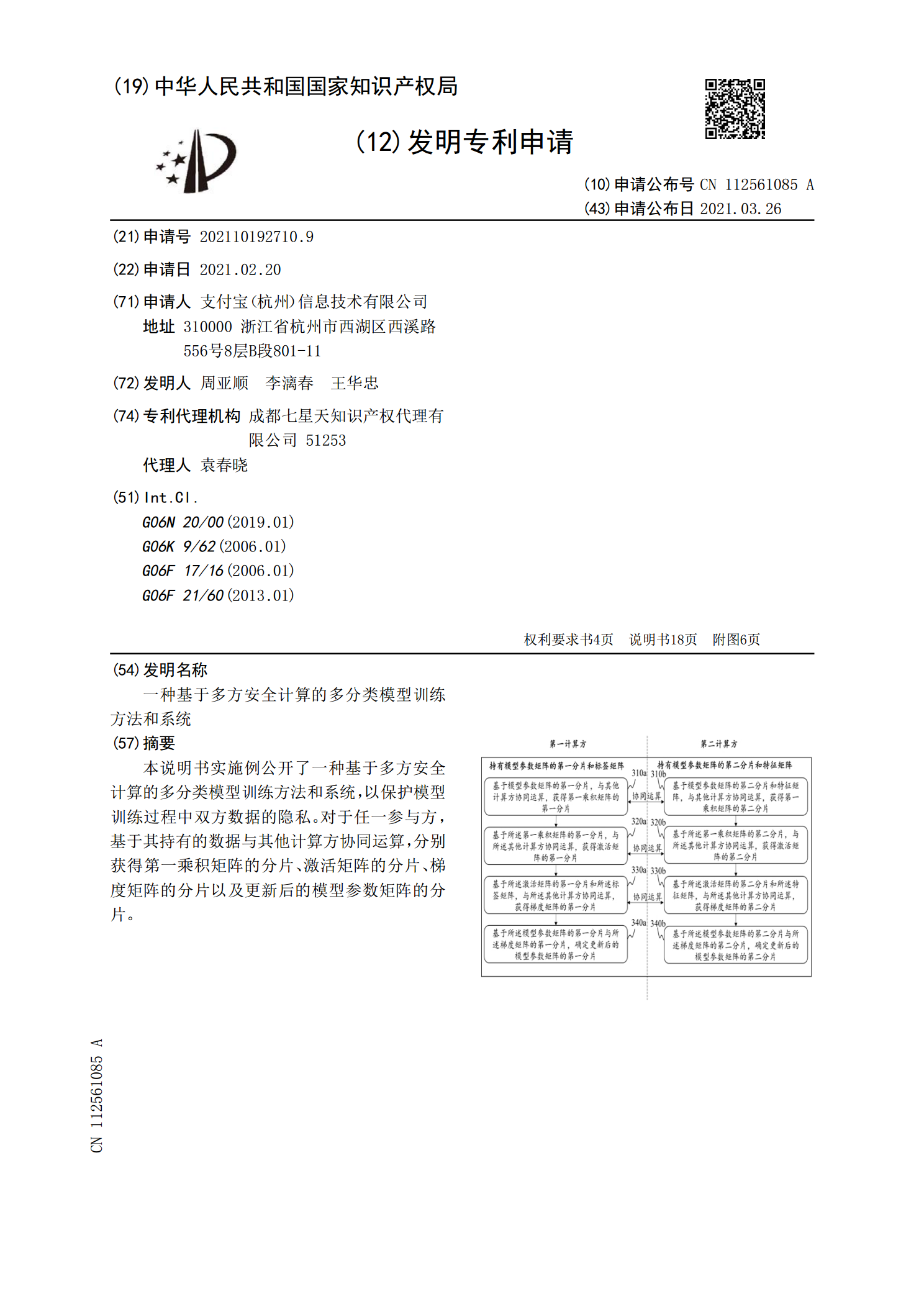
本说明书实施例公开了一种基于多方安全计算的多分类模型训练方法和系统,以保护模型训练过程中双方数据的隐私。对于任一参与方,基于其持有的数据与其他计算方协同运算,分别获得第一乘积矩阵的分片、激活矩阵的分片、梯度矩阵的分片以及更新后的模型参数矩阵的分片。

一种基于安全多方计算的模型联合训练方法.pdf
本说明书涉及机器学习领域,特别涉及一种基于安全多方计算的模型联合训练方法。安全多方计算包括多个参与方,该方法由其中某一参与方执行;其包括:与其他参与方协同,基于密态特征和密态标签对模型进行联合训练,在密态下对模型进行一轮或多轮迭代更新,获得更新后的密态模型参数;其中,一轮或多轮迭代更新中的至少一轮进一步包括:与其他参与方协同,确定模型的密态损失函数值;与其他参与方协同,基于所述密态损失函数值判断该模型的损失函数值是否满足预设的阈值条件,得到判断结果;基于所述判断结果确定是否停止联合训练。
一种基于多方安全计算的模型评估方法和系统.pdf
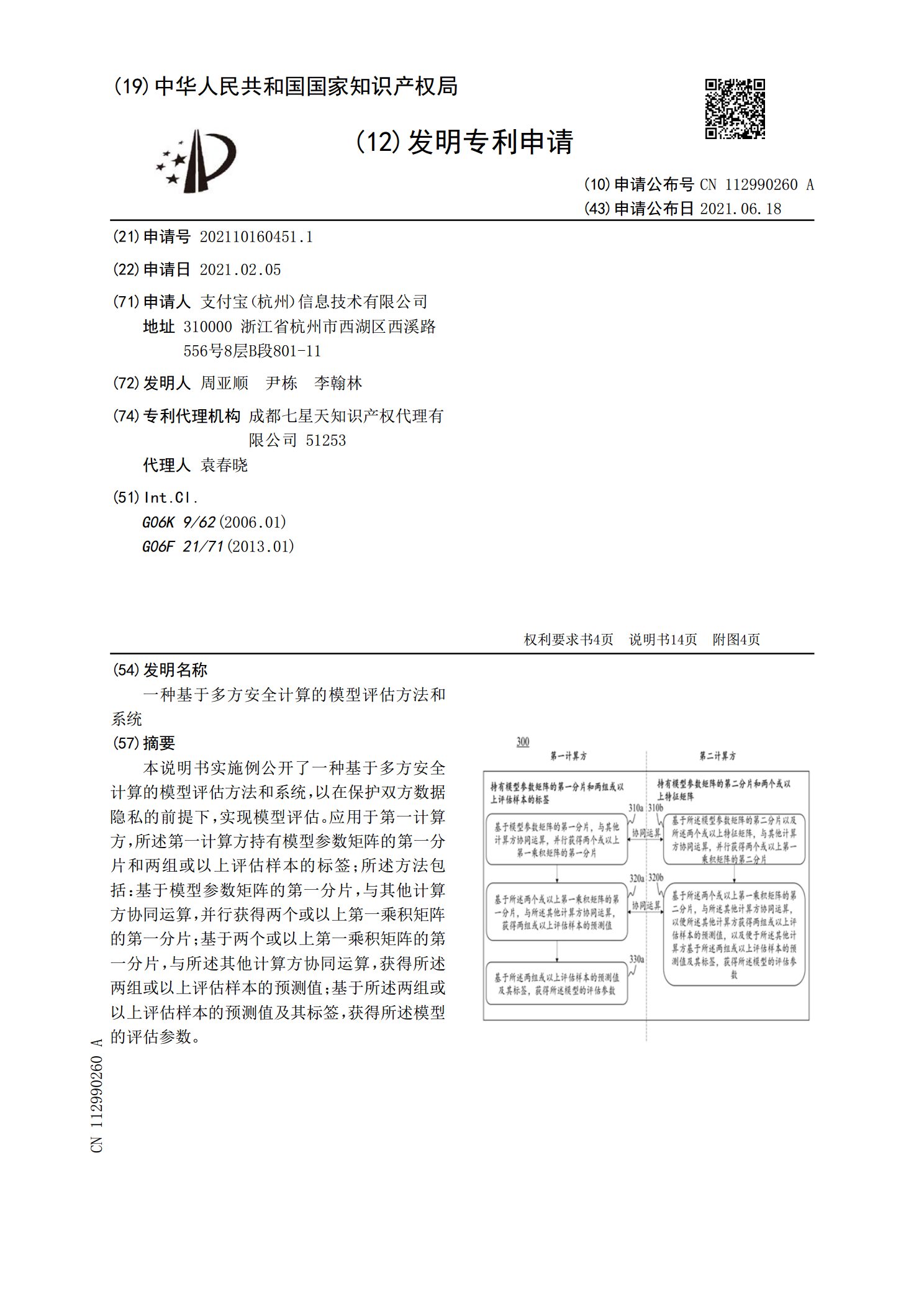
本说明书实施例公开了一种基于多方安全计算的模型评估方法和系统,以在保护双方数据隐私的前提下,实现模型评估。应用于第一计算方,所述第一计算方持有模型参数矩阵的第一分片和两组或以上评估样本的标签;所述方法包括:基于模型参数矩阵的第一分片,与其他计算方协同运算,并行获得两个或以上第一乘积矩阵的第一分片;基于两个或以上第一乘积矩阵的第一分片,与所述其他计算方协同运算,获得所述两组或以上评估样本的预测值;基于所述两组或以上评估样本的预测值及其标签,获得所述模型的评估参数。
基于多方安全计算的树模型的训练方法和业务预测方法.pdf
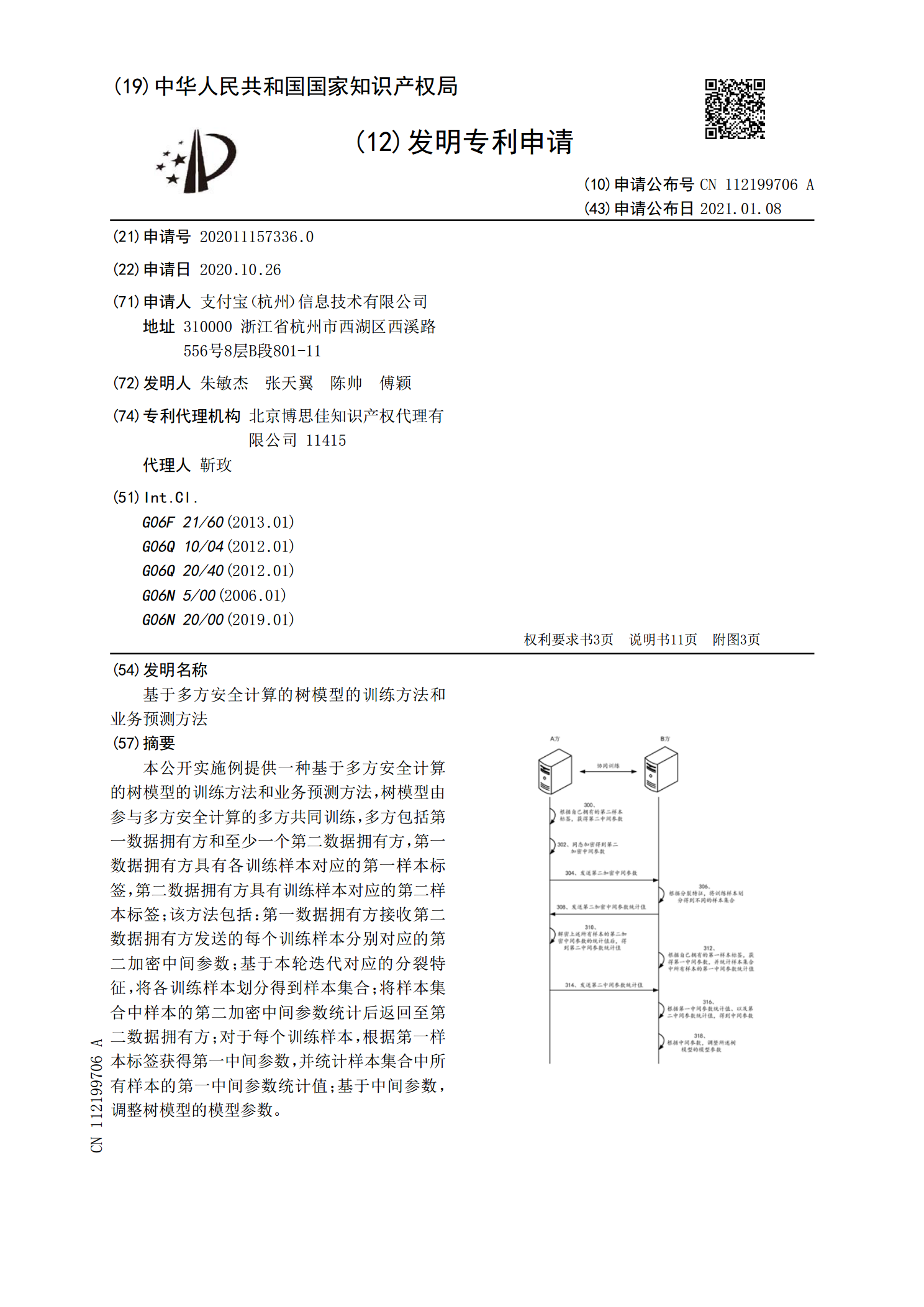
本公开实施例提供一种基于多方安全计算的树模型的训练方法和业务预测方法,树模型由参与多方安全计算的多方共同训练,多方包括第一数据拥有方和至少一个第二数据拥有方,第一数据拥有方具有各训练样本对应的第一样本标签,第二数据拥有方具有训练样本对应的第二样本标签;该方法包括:第一数据拥有方接收第二数据拥有方发送的每个训练样本分别对应的第二加密中间参数;基于本轮迭代对应的分裂特征,将各训练样本划分得到样本集合;将样本集合中样本的第二加密中间参数统计后返回至第二数据拥有方;对于每个训练样本,根据第一样本标签获得第一中间参