
深度估计方法和系统.pdf

听云****君哇

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
深度估计方法和系统.pdf
本说明书提供的深度估计方法和系统,获取目标物体的异质双目图像,对所述异质双目图像进行跨域迁移处理生成同质双目图像,将所述同质双目图像输入深度估计网络模型,能够准确地获取所述深度估计网络模型输出的所述目标物体的深度图,而且不依赖3D摄像头,达到了降本增效的效果。
深度估计系统.pdf
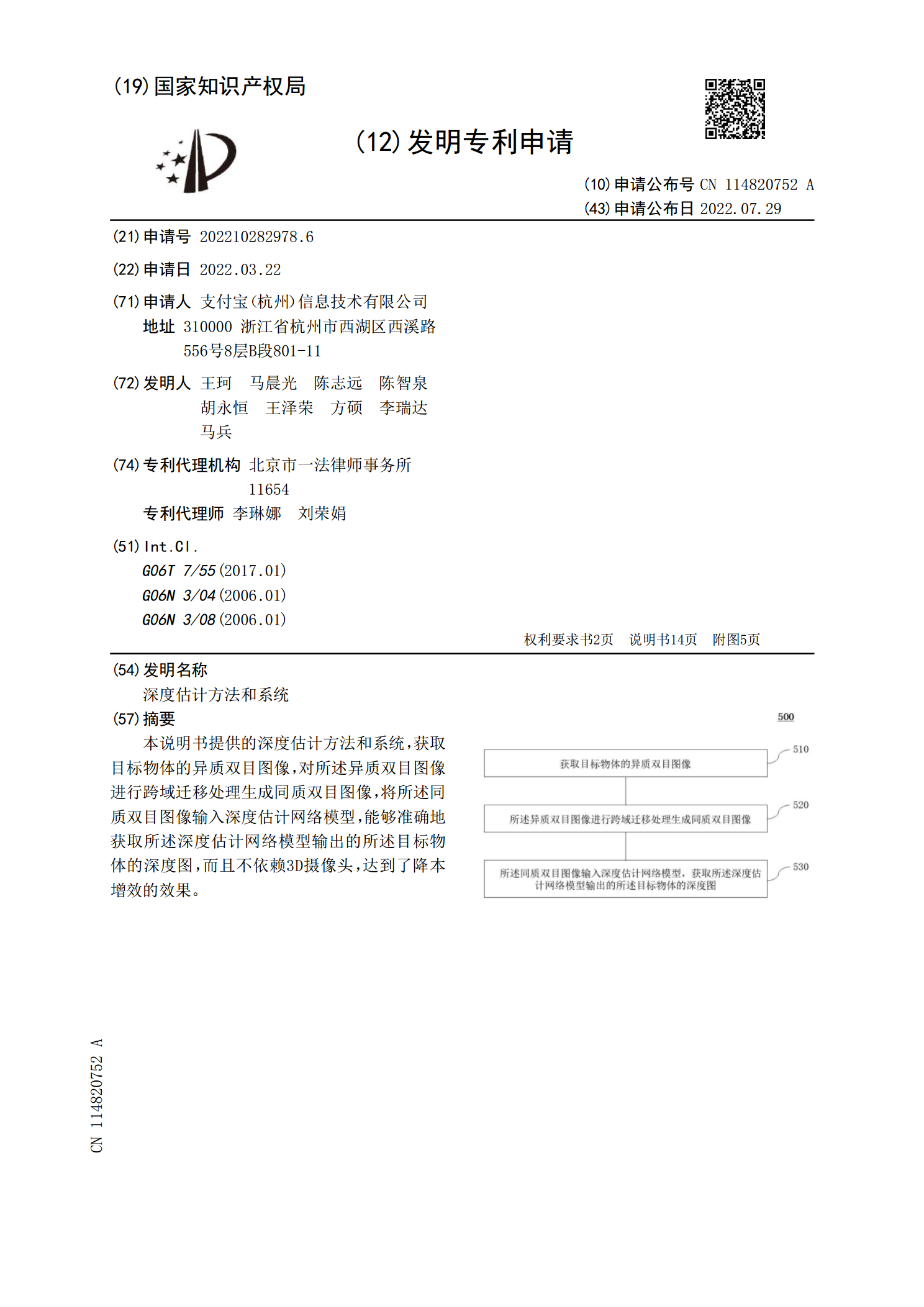
一种用于从点(P)捕获颜色和距离信息的深度估计系统(1),所述深度估计系统(1)包括光发射器(2)和多层成像传感器(3),所述多层成像传感器(3)用于吸收多个离散电磁频谱内的电磁辐射(R)。这使得能够捕获不同类型的信息,例如3D数据点的距离信息和颜色信息。
使用全局最小化和深度内插的立体深度估计的系统和方法.pdf
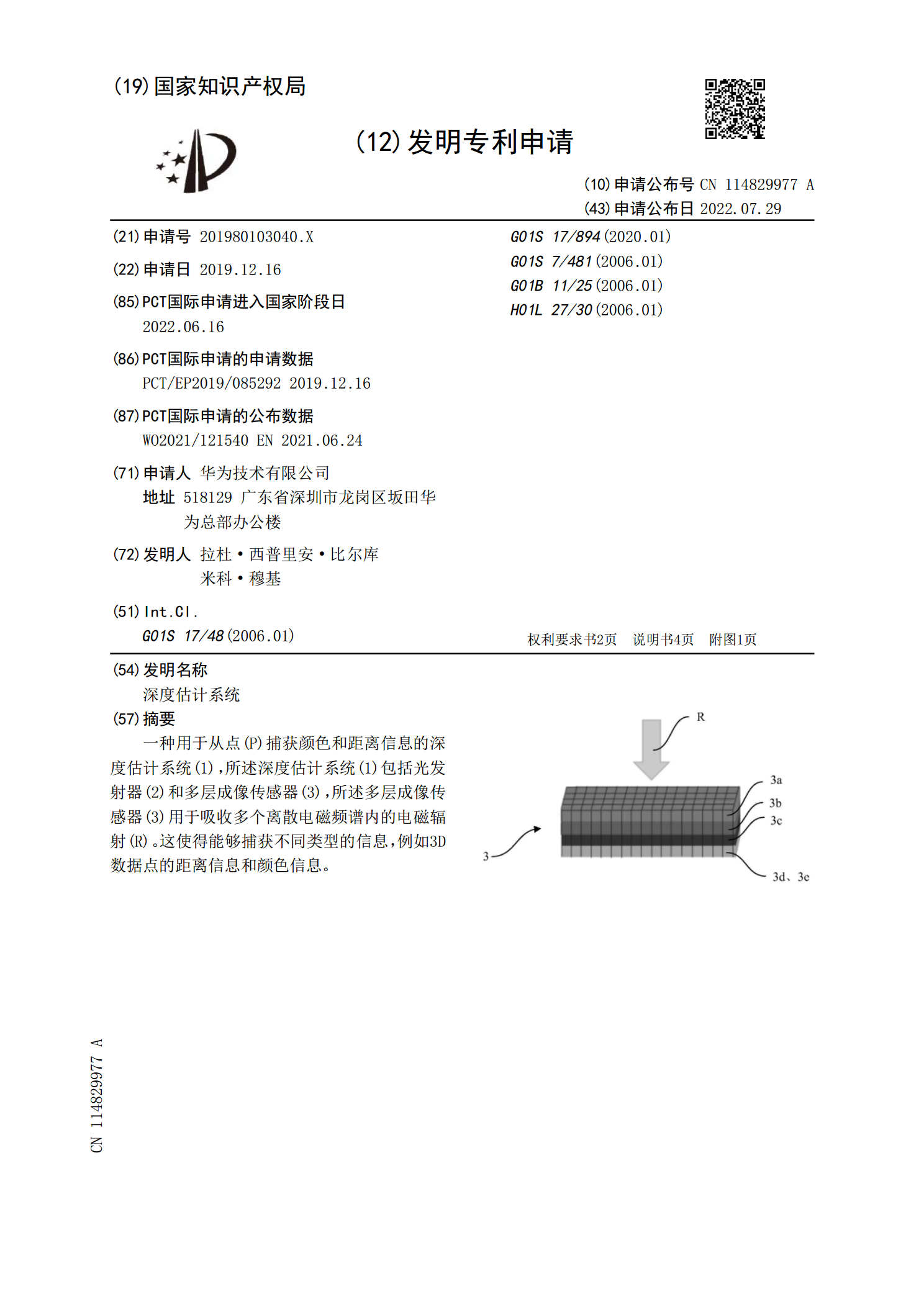
多个方面涉及一种生成包含物体的深度信息的高分辨率图像的方法。在一个方面中,所述方法包括将第一参考图像和第二参考图像从第一分辨率下采样到第二分辨率,其中所述第一分辨率高于所述第二分辨率,并且其中所述第一参考图像和所述第二参考图像包括立体图像对。所述方法还包括:使用下采样后的所述立体图像对,基于全局最小化技术以所述第二分辨率生成深度图。所述方法还包括将所述深度图从所述第二分辨率上采样到所述第一分辨率,并使用导向滤波器将上采样后的所述深度图的轮廓与所述第一参考图像的轮廓对准。
估计到达时间的系统和方法.pdf
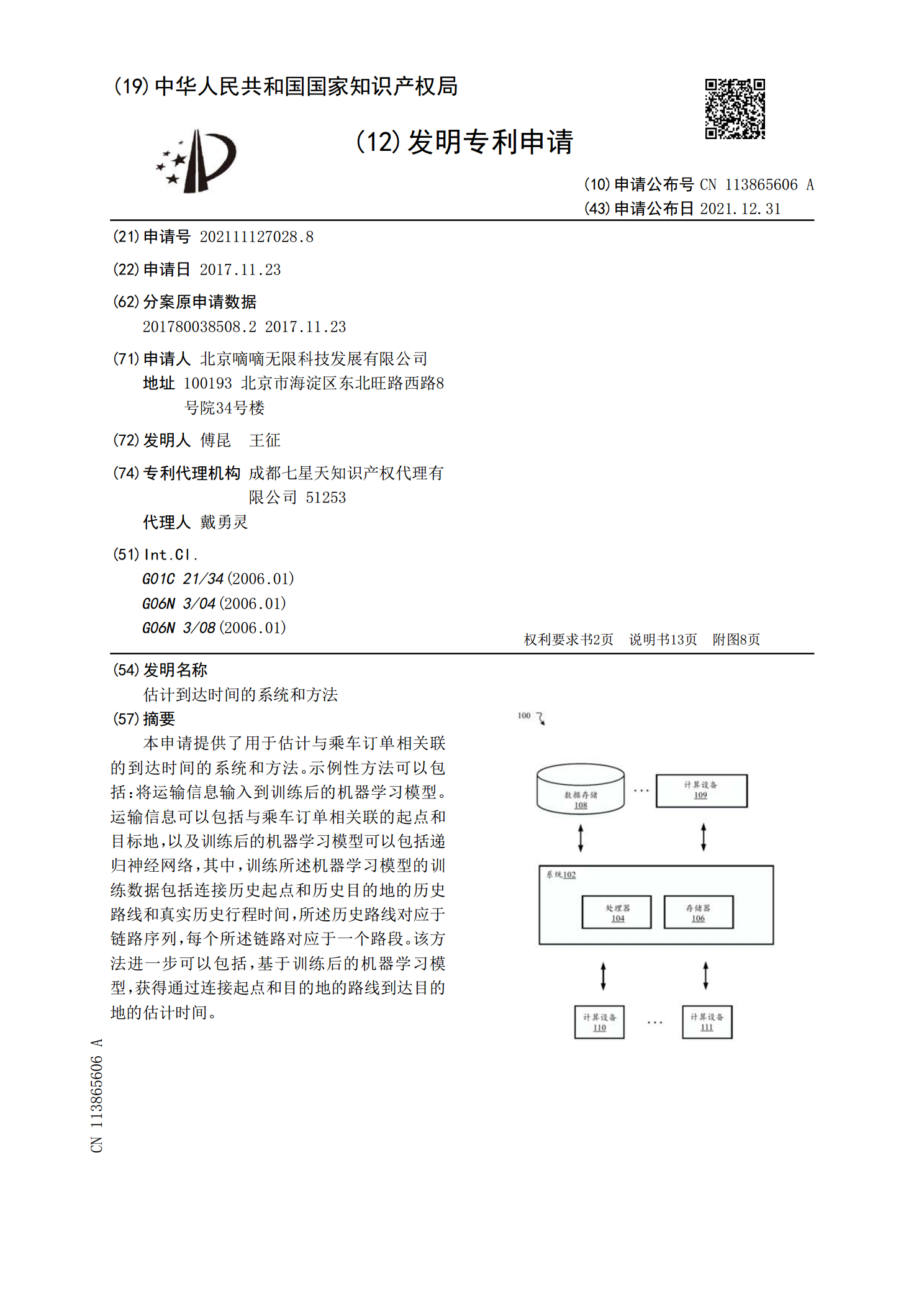
本申请提供了用于估计与乘车订单相关联的到达时间的系统和方法。示例性方法可以包括:将运输信息输入到训练后的机器学习模型。运输信息可以包括与乘车订单相关联的起点和目标地,以及训练后的机器学习模型可以包括递归神经网络,其中,训练所述机器学习模型的训练数据包括连接历史起点和历史目的地的历史路线和真实历史行程时间,所述历史路线对应于链路序列,每个所述链路对应于一个路段。该方法进一步可以包括,基于训练后的机器学习模型,获得通过连接起点和目的地的路线到达目的地的估计时间。

估计到达时间的系统和方法.pdf
本申请提供了用于估计与乘车订单相关联的到达时间的系统和方法。示例性方法可以包括:将运输信息输入到训练后的机器学习模型。运输信息可以包括与乘车订单相关联的起点和目标地,以及训练后的机器学习模型可以包括广度网络和深度神经网络。该方法进一步可以包括,基于训练后的机器学习模型,获得通过连接起点和目的地的路线到达目的地的估计时间。