
一种移动端实时视频目标分割方法、系统及存储介质.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种移动端实时视频目标分割方法、系统及存储介质.pdf
本申请涉及视频数据处理技术领域,公开了一种移动端实时视频目标分割方法、系统及存储介质,该方法包括:通过构建用于分割视频帧画面中指定目标掩膜图的网络模型,并对网络模型进行预训练和精度提升训练,结合特征存储器,以栈的形式将上述记忆编码器E
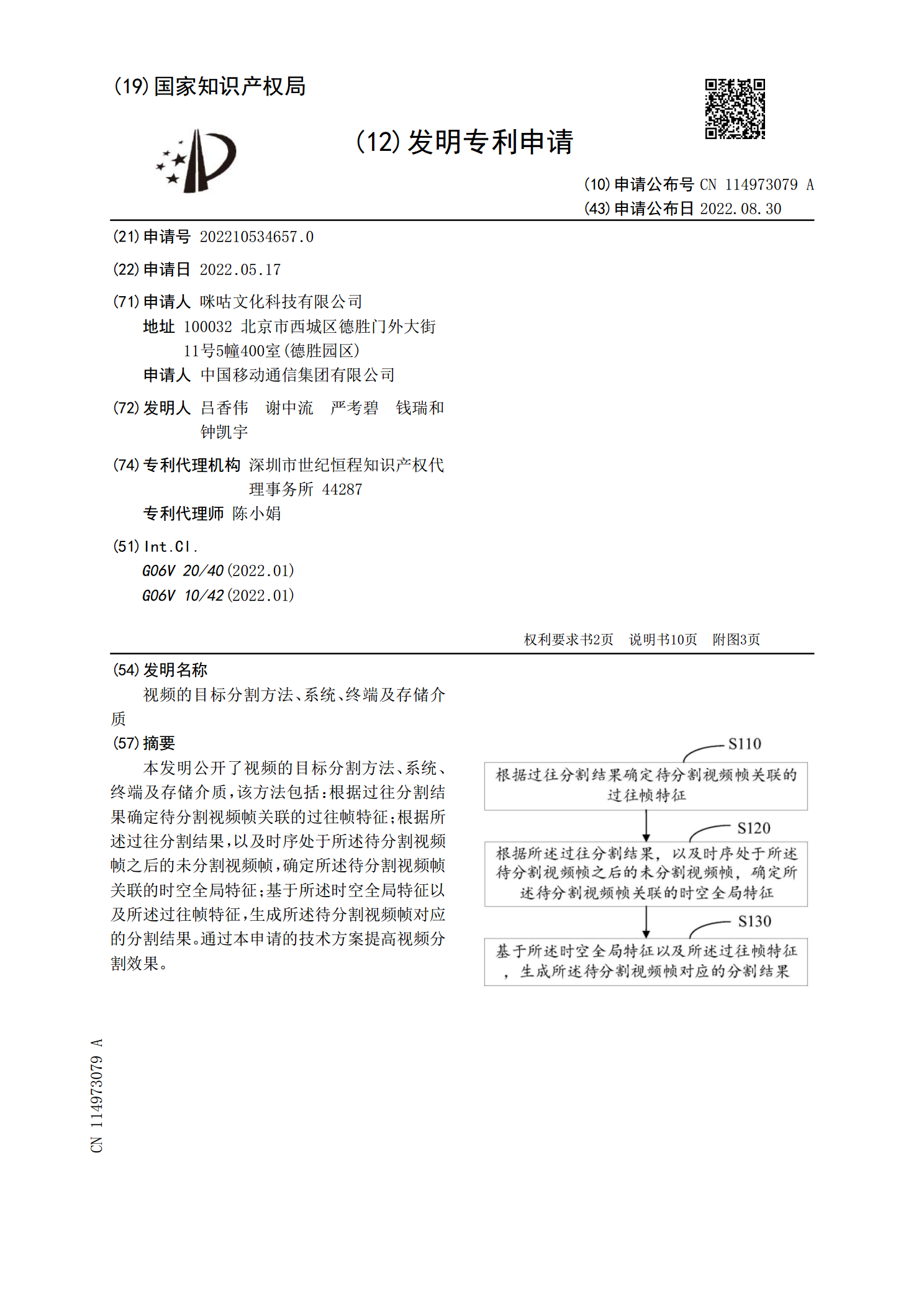
视频的目标分割方法、系统、终端及存储介质.pdf
本发明公开了视频的目标分割方法、系统、终端及存储介质,该方法包括:根据过往分割结果确定待分割视频帧关联的过往帧特征;根据所述过往分割结果,以及时序处于所述待分割视频帧之后的未分割视频帧,确定所述待分割视频帧关联的时空全局特征;基于所述时空全局特征以及所述过往帧特征,生成所述待分割视频帧对应的分割结果。通过本申请的技术方案提高视频分割效果。

一种移动播放端实时视频画质增强方法及系统.pdf
本发明公开了一种移动播放端实时视频画质增强方法及系统,解码视频流数据,得到RGB图像数据;对RGB图像数据进行图像分区,将图像分成四类区域:边缘区域且在保护区域内、非边缘区域且在保护区域内、边缘区域且在非保护区域内、非边缘区域且在非保护区域内,分别标记为P
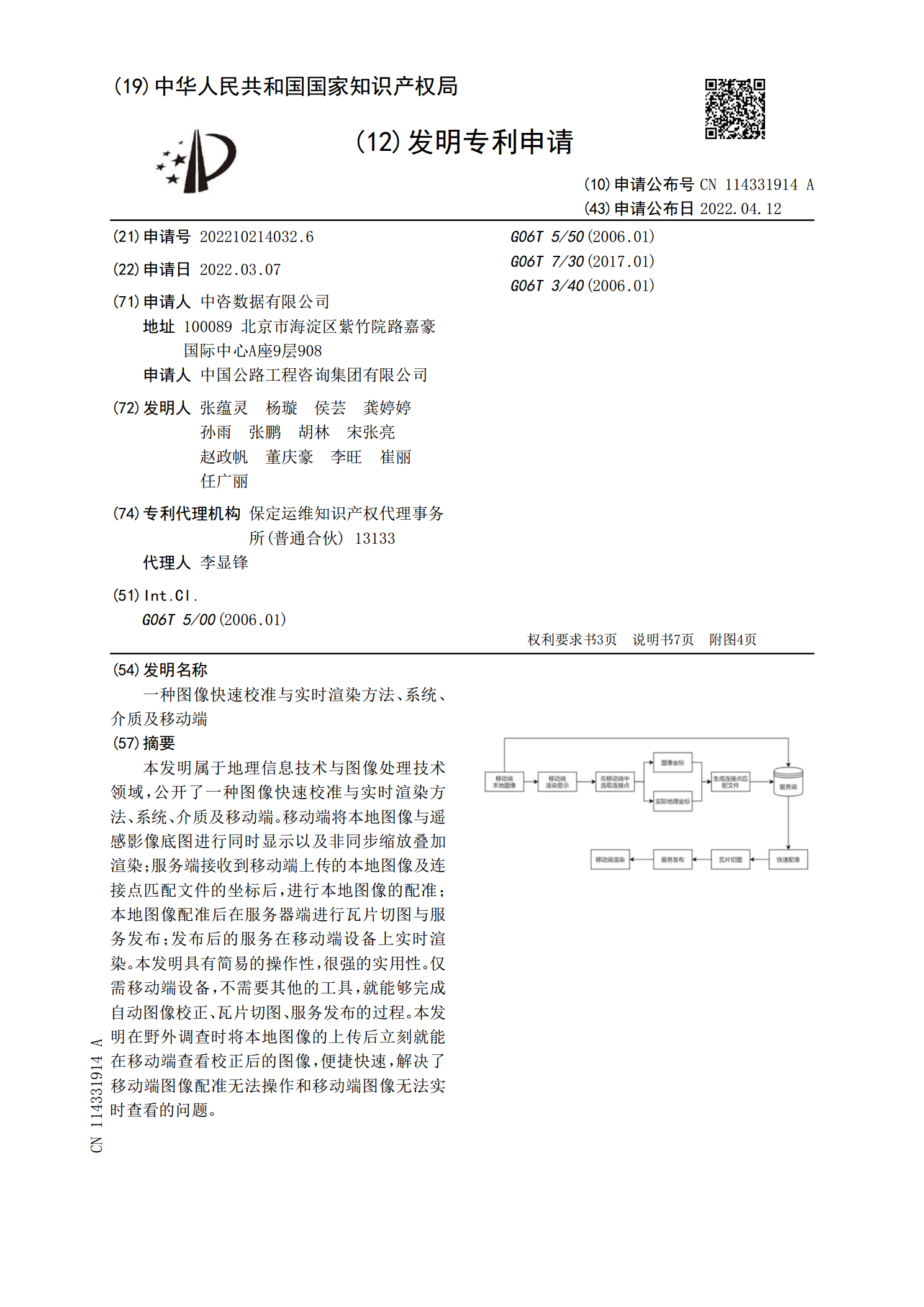
一种图像快速校准与实时渲染方法、系统、介质及移动端.pdf
本发明属于地理信息技术与图像处理技术领域,公开了一种图像快速校准与实时渲染方法、系统、介质及移动端。移动端将本地图像与遥感影像底图进行同时显示以及非同步缩放叠加渲染;服务端接收到移动端上传的本地图像及连接点匹配文件的坐标后,进行本地图像的配准;本地图像配准后在服务器端进行瓦片切图与服务发布;发布后的服务在移动端设备上实时渲染。本发明具有简易的操作性,很强的实用性。仅需移动端设备,不需要其他的工具,就能够完成自动图像校正、瓦片切图、服务发布的过程。本发明在野外调查时将本地图像的上传后立刻就能在移动端查看校正
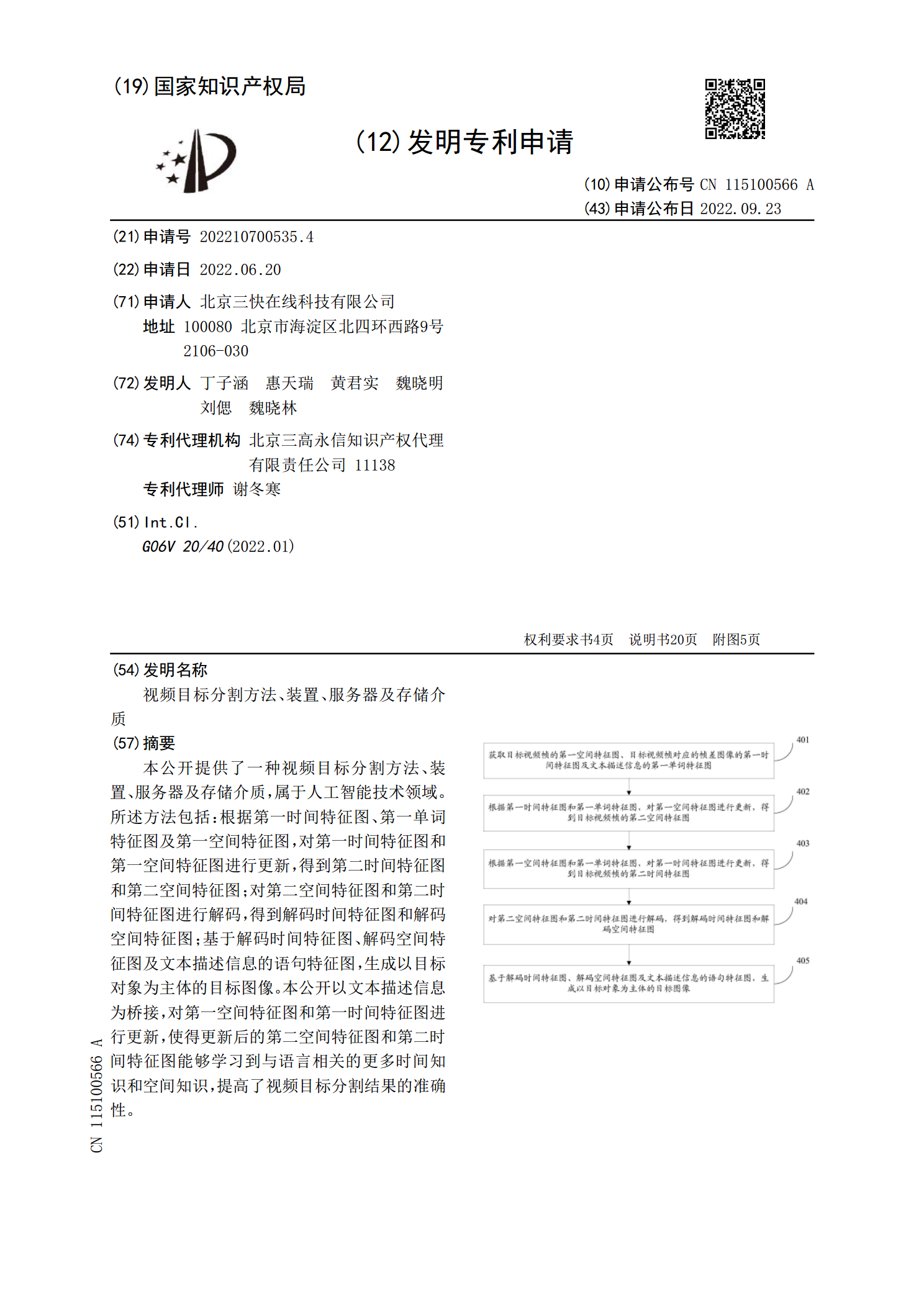
视频目标分割方法、装置、服务器及存储介质.pdf
本公开提供了一种视频目标分割方法、装置、服务器及存储介质,属于人工智能技术领域。所述方法包括:根据第一时间特征图、第一单词特征图及第一空间特征图,对第一时间特征图和第一空间特征图进行更新,得到第二时间特征图和第二空间特征图;对第二空间特征图和第二时间特征图进行解码,得到解码时间特征图和解码空间特征图;基于解码时间特征图、解码空间特征图及文本描述信息的语句特征图,生成以目标对象为主体的目标图像。本公开以文本描述信息为桥接,对第一空间特征图和第一时间特征图进行更新,使得更新后的第二空间特征图和第二时间特征图能