
一种基于双分支孪生网络结构的视觉目标跟踪方法.pdf

一条****然后


1/10

2/10

3/10

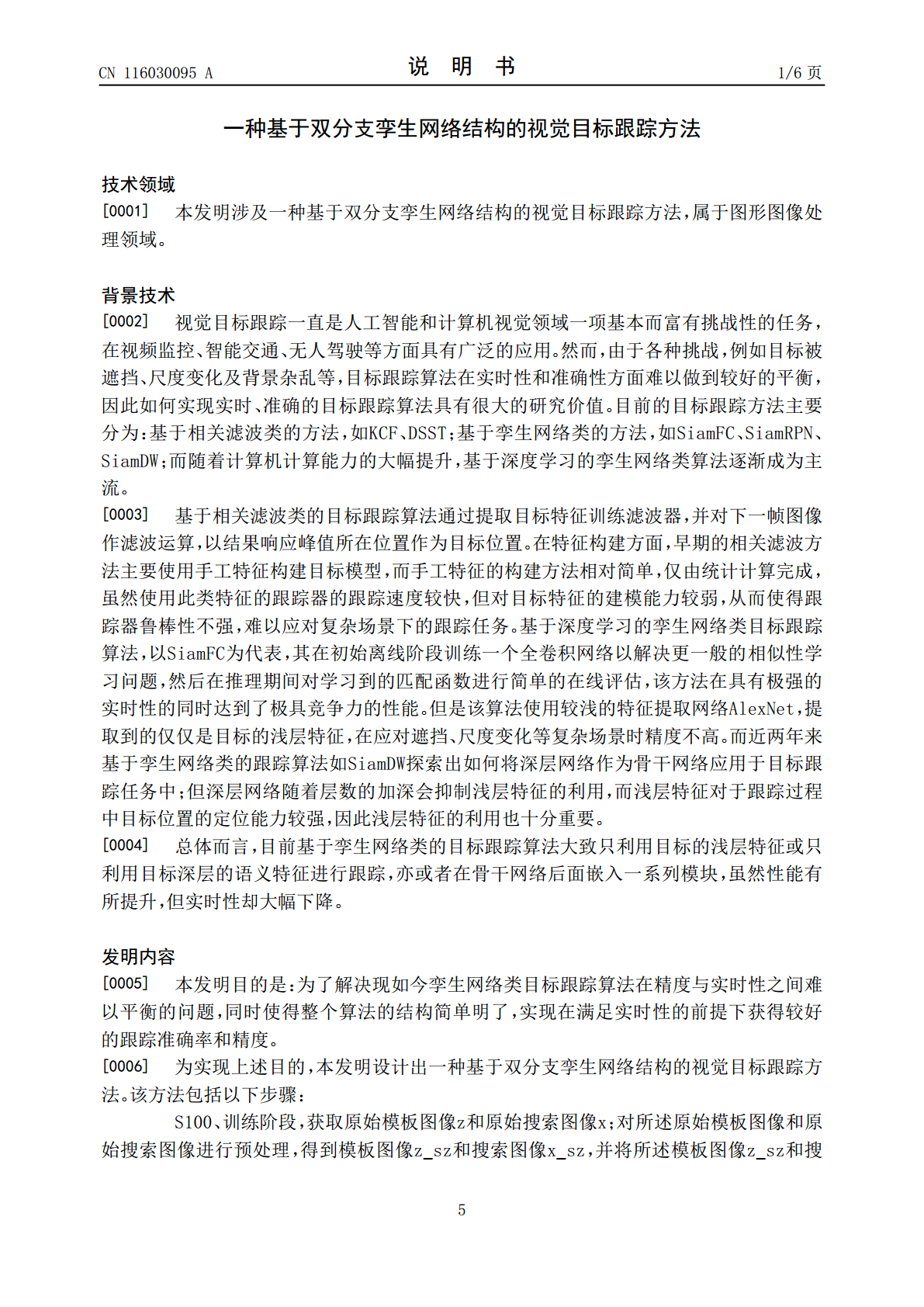
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双分支孪生网络结构的视觉目标跟踪方法.pdf
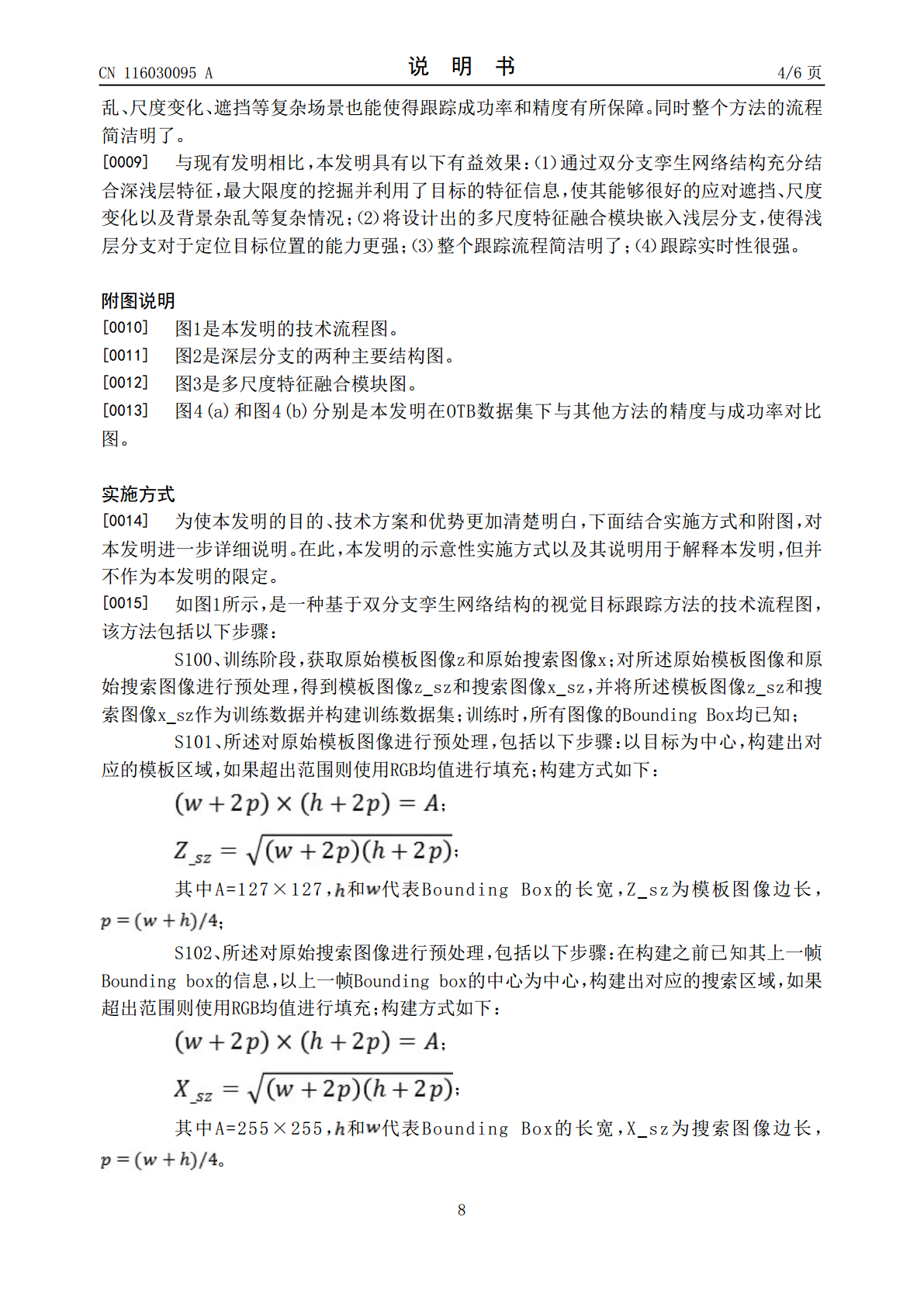
本发明涉及一种基于双分支孪生网络结构的视觉目标跟踪方法,属于图形图像处理领域;它解决了目前目标跟踪方法中遮挡、形变、模糊运动以及相似物干扰等常见的问题;其技术方案是:向双分支孪生网络结构同时输入模板帧和搜索帧图像,然后将经过双分支孪生网络结构的模板帧和搜索帧图像进行互相关操作,得到一张响应图,取出响应图中值最大的点即为待跟踪目标的中心位置;本发明具有以下有益效果:通过双分支网络结构中的浅层分支能精确捕捉目标位置信息;深层分支通过提取目标抽象的语义信息,能很好的应对跟踪过程中目标出现的遮挡、尺度变化等问题;

基于孪生网络的视觉目标跟踪方法.docx
基于孪生网络的视觉目标跟踪方法摘要:视觉目标跟踪是计算机视觉领域的重要研究方向,在很多应用场景中具有广泛的应用前景。本文提出了一种基于孪生网络的视觉目标跟踪方法。该方法使用了孪生网络结构,将目标图像和候选图像进行特征提取和比较,从而得到与目标最相似的候选图像,从而实现目标的跟踪。实验结果表明,该方法在提高目标跟踪准确性和鲁棒性方面具有较好的效果。关键词:视觉目标跟踪、孪生网络、特征提取、相似度比较1.引言视觉目标跟踪是计算机视觉领域的重要研究方向之一,在视频分析、智能监控等应用场景中具有广泛的应用前景。目
基于孪生网络结构的目标跟踪算法综述.pptx
汇报人:CONTENTSPARTONEPARTTWO孪生网络的定义与原理孪生网络在目标跟踪领域的应用孪生网络的优势与挑战PARTTHREE基于特征提取的目标跟踪算法基于深度学习的目标跟踪算法基于联合学习的目标跟踪算法PARTFOUR特征提取与匹配目标状态估计与跟踪目标轨迹优化与跟踪精度提升PARTFIVE与传统算法的比较与深度学习算法的比较与联合学习算法的比较PARTSIX提升算法的鲁棒性与泛化能力实现多目标跟踪与复杂场景下的跟踪结合其他技术提升目标跟踪性能汇报人:

基于孪生网络结构的目标跟踪算法综述.docx
基于孪生网络结构的目标跟踪算法综述摘要:目标跟踪算法是计算机视觉领域中一个重要的研究方向。其中,基于孪生网络结构的目标跟踪算法由于其高效性和准确性得到了广泛的应用。本文对现有的基于孪生网络结构的目标跟踪算法进行全面综述,包括算法原理、优点、缺点和应用场景等方面,同时分析了目前的研究热点和未来的发展方向。关键字:目标跟踪算法;孪生网络;算法原理;优点;缺点;应用场景;研究热点;发展方向一、引言目标跟踪是计算机视觉领域中一个重要的研究方向,其在视频监控、智能交通等领域中有着广泛的应用。目标跟踪算法的主要任务是

一种基于困难样本挖掘的孪生网络单目标视觉跟踪方法.pdf
本发明公开了一种基于困难样本挖掘的孪生网络单目标跟踪方法,包括构建训练集、构建基于困难样本挖掘的卷积孪生网络等步骤:本发明将困难样本挖掘引入到目标跟踪方法中,在训练过程中挖掘困难负样本作为训练数据,更新网络参数,并且选取困难样本三元组损失来作为损失函数,对其不断优化,通过优化损失,模型在训练过程中不断挖掘困难负样本,使网络充分训练,更好的区分相似目标,使模型学习到具有区分能力的特征,具有较好的目标跟踪效果。