
基于无人机与深度学习的风机表面缺陷在线检测分割方法.pdf

慧娇****文章

1/10

2/10
3/10
4/10

5/10
6/10

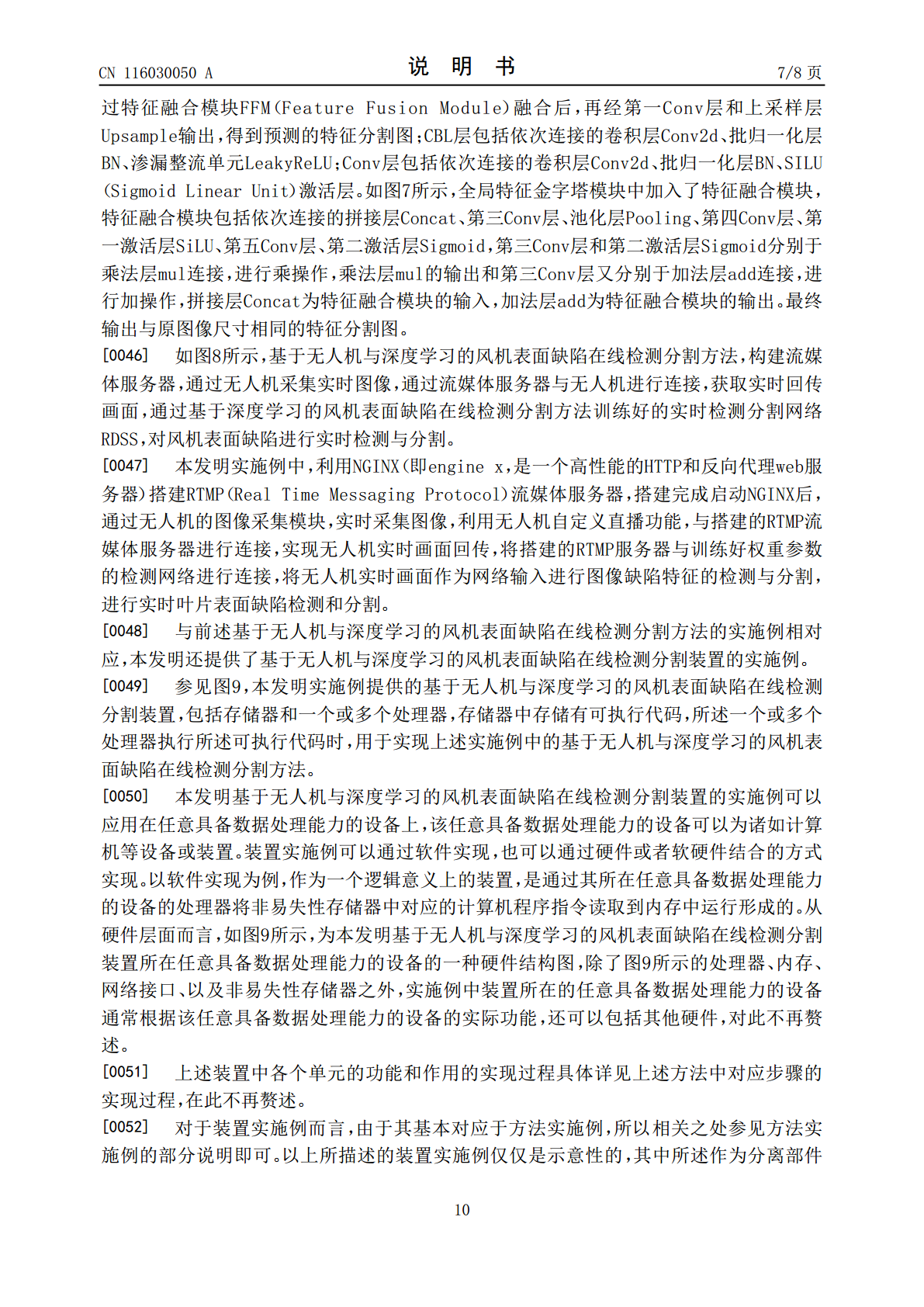
7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于无人机与深度学习的风机表面缺陷在线检测分割方法.pdf
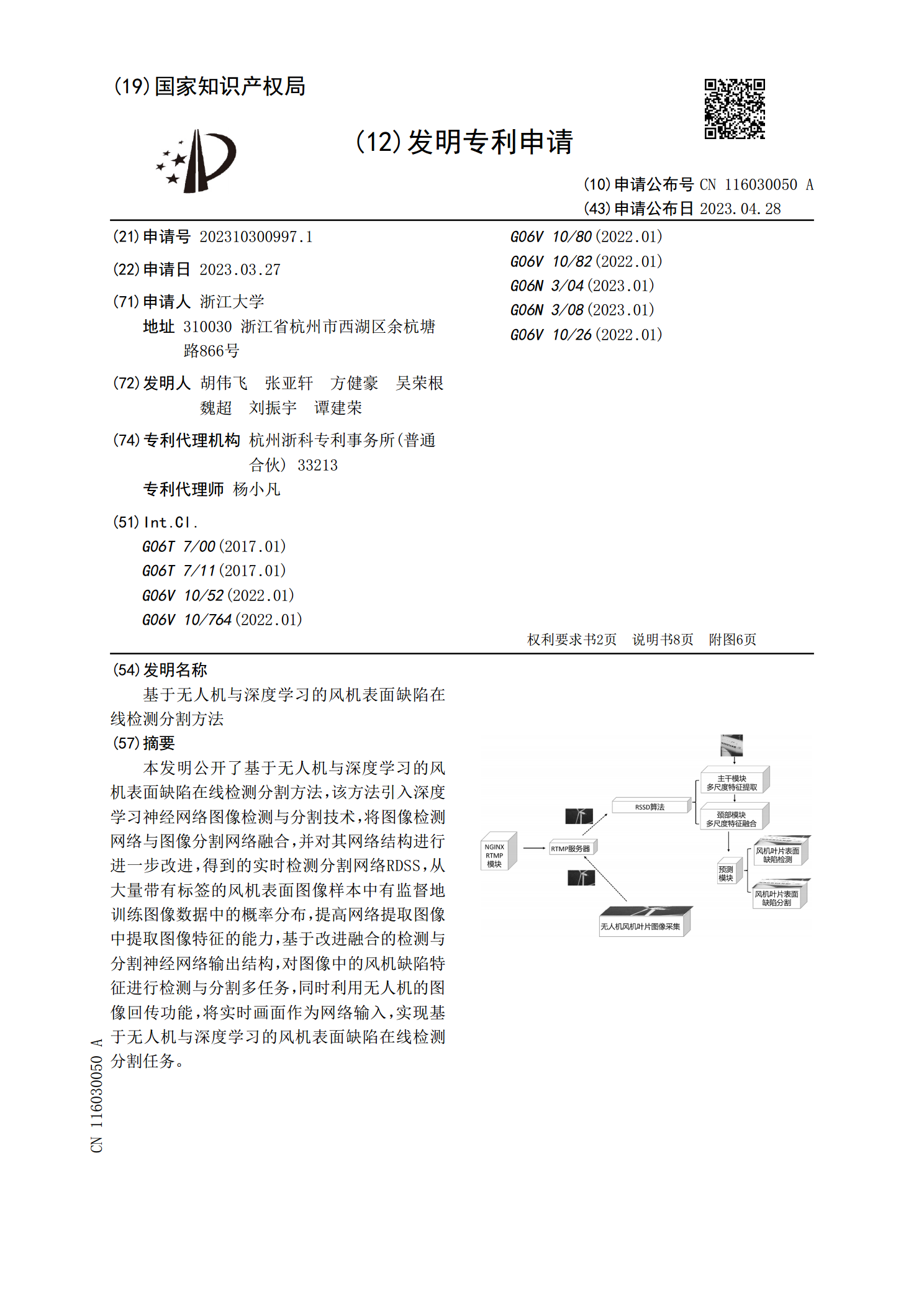
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN116030050A(43)申请公布日2023.04.28(21)申请号202310300997.1G06V10/80(2022.01)(22)申请日2023.03.27G06V10/82(2022.01)G06N3/04(2023.01)(71)申请人浙江大学G06N3/08(2023.01)地址310030浙江省杭州市西湖区余杭塘G06V10/26(2022.01)路866号(72)发明人胡伟飞张亚轩方健豪吴荣根魏超刘振宇谭建荣(74)专

基于深度学习的表面缺陷检测方法综述.pptx
汇报人:CONTENTS添加章节标题表面缺陷检测方法概述表面缺陷检测的定义和重要性表面缺陷检测的传统方法深度学习在表面缺陷检测中的应用深度学习算法在表面缺陷检测中的发展历程深度学习的基本原理深度学习在表面缺陷检测中的发展阶段深度学习算法在表面缺陷检测中的优势基于深度学习的表面缺陷检测方法分类基于卷积神经网络的表面缺陷检测方法基于生成对抗网络的表面缺陷检测方法基于强化学习的表面缺陷检测方法基于迁移学习的表面缺陷检测方法深度学习在表面缺陷检测中的实际应用案例在工业领域的应用案例在农业领域的应用案例在医疗领域的

基于深度学习的混凝土表面缺陷检测方法.docx
基于深度学习的混凝土表面缺陷检测方法基于深度学习的混凝土表面缺陷检测方法摘要:混凝土表面缺陷检测是工程结构安全评估的重要环节。传统的人工检测方法效率低下而且容易出错,因此需要一种自动化的缺陷检测方法。本文提出了基于深度学习的混凝土表面缺陷检测方法,使用卷积神经网络(CNN)来实现缺陷自动检测。首先,我们收集了大量的混凝土表面图像数据,并对缺陷进行了标记。然后,我们使用卷积神经网络来训练模型,以便自动检测出混凝土表面的缺陷。最后,我们通过实验结果证明,所提出的基于深度学习的方法可以有效地识别混凝土表面的缺陷

基于深度学习的风机叶片表面缺陷识别研究.docx
基于深度学习的风机叶片表面缺陷识别研究基于深度学习的风机叶片表面缺陷识别研究摘要:风机叶片作为风力发电系统中最重要的组成部分之一,表面缺陷的发现对确保风力发电的安全、高效运行至关重要。本文提出了一种基于深度学习的方法,用于风机叶片表面缺陷的自动识别。通过收集大量的风机叶片图像数据,并进行数据预处理,建立了一个针对风机叶片缺陷的深度学习模型。实验结果表明,该方法在风机叶片表面缺陷识别方面具有显著的性能。关键词:风机叶片,表面缺陷,深度学习,图像识别引言风力发电作为一种清洁、可再生的能源,近年来在能源领域得到

基于深度学习的胡萝卜表面缺陷在线检测方法研究的任务书.docx
基于深度学习的胡萝卜表面缺陷在线检测方法研究的任务书一、课题背景胡萝卜是一种很普遍的蔬菜,受到广泛的关注与研究。在胡萝卜生产与销售过程中,胡萝卜表面的缺陷问题是一个比较困扰的难题,对蔬菜的质量和贮藏期都会产生很大的影响。因此,在胡萝卜表面缺陷在线检测方面的研究具有非常重要的意义。目前,传统的胡萝卜表面缺陷检测方法主要是手工检测和机器视觉检测两种,但手工检测方法效率低,精度不高且受人员经验和主观因素影响较大;机器视觉检测方法则需要大量的人工标注样本数据并对特征进行有效提取,而且模型的泛化能力和抗干扰性存在一