
一种串联式柔臂TBM刀盘掘进控制方法.pdf

mm****酱吖


1/8

2/8
3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种串联式柔臂TBM刀盘掘进控制方法.pdf
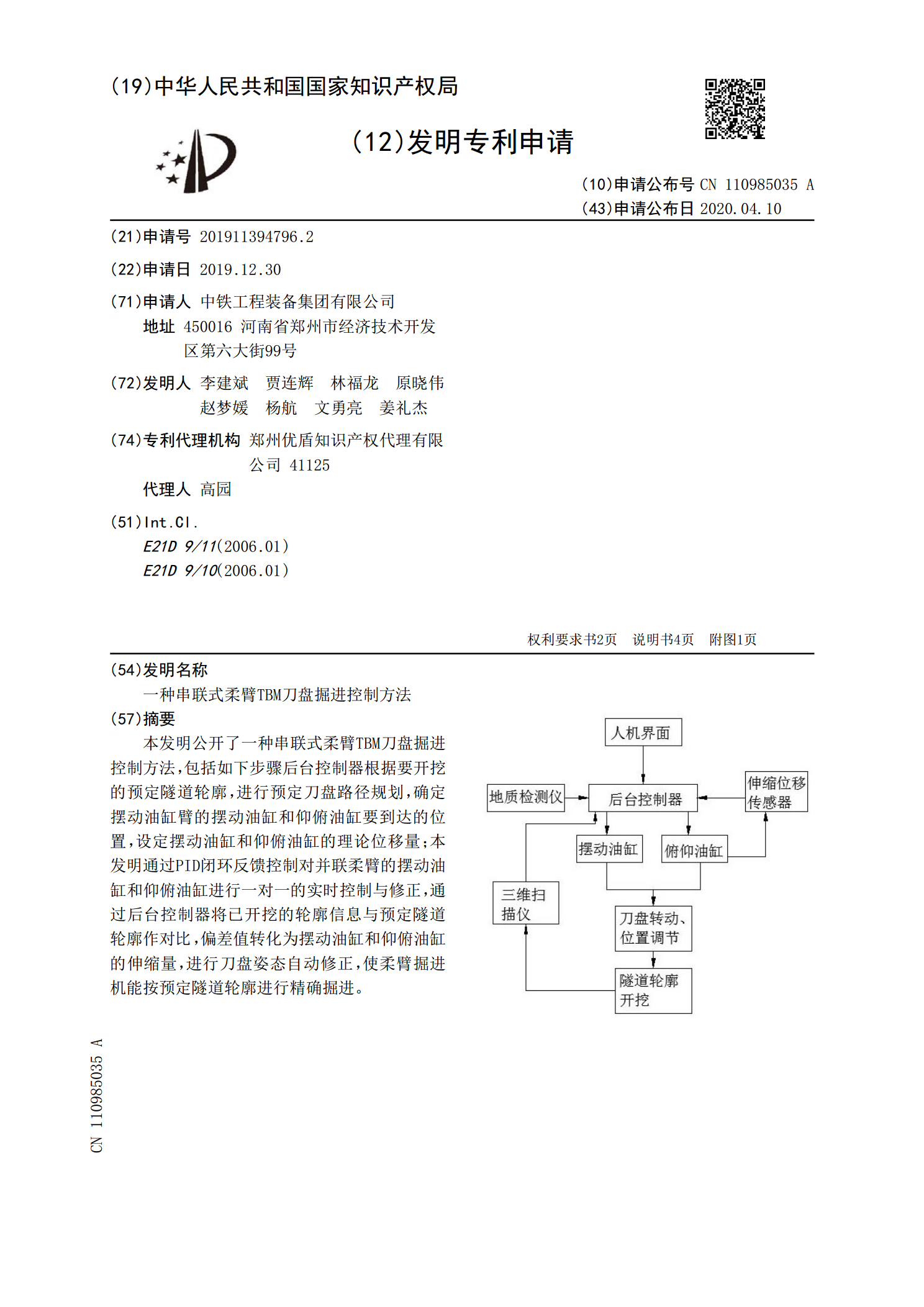
本发明公开了一种串联式柔臂TBM刀盘掘进控制方法,包括如下步骤后台控制器根据要开挖的预定隧道轮廓,进行预定刀盘路径规划,确定摆动油缸臂的摆动油缸和仰俯油缸要到达的位置,设定摆动油缸和仰俯油缸的理论位移量;本发明通过PID闭环反馈控制对并联柔臂的摆动油缸和仰俯油缸进行一对一的实时控制与修正,通过后台控制器将已开挖的轮廓信息与预定隧道轮廓作对比,偏差值转化为摆动油缸和仰俯油缸的伸缩量,进行刀盘姿态自动修正,使柔臂掘进机能按预定隧道轮廓进行精确掘进。

一种适用于柔臂掘进机的TBM刀盘及其开挖方法.pdf
本发明公开了一种适用于柔臂掘进机的TBM刀盘及其开挖方法,解决了现有技术中TBM刀盘配合柔臂掘进机开挖效率低的问题。本发明包括固定刀筒,固定刀筒通过并联油缸机构与主驱动相连接,固定刀筒的前面板上设有主开挖刀具,固定刀筒的外环面上设有侧面旋挖刀具。本发明固定刀筒的外壁上沿轴向设有侧滚刀组,配合主开挖刀具对掌子面和洞壁进行挤压加旋切破岩,提高柔臂掘进机的挖掘效率。此外本发明的刀盘能相对并联油缸机构进行自转,由传统的挤压破岩转变为旋压破岩,两种工作模式可任意切换,以满足不同工况需求,提高装置的适用性。

一种新型摆动式柔臂TBM及其掘进方法.pdf
本发明公开了一种新型摆动式柔臂TBM及其掘进方法,解决了现有技术中柔臂掘进机掘进效率低的问题。本发明包括刀盘掘进系统、主梁撑护系统和出渣系统,刀盘掘进系统设置在主梁撑护系统的前部,出渣系统位于主梁撑护系统上且与刀盘掘进系统相对应,刀盘掘进系统包括旋切刀盘和摆动伸缩臂,摆动伸缩臂的一端与旋切刀盘相连接、另一端通过摆动机构与主梁撑护系统转动连接。本发明刀盘掘进系统的旋切刀盘在破岩方式上,既有正滚刀又有在固定刀筒轴向布置有多把旋切的侧滚刀,当摆动油缸配合俯仰油缸使旋切刀正面顶紧掌子面时,柔臂掘进机以正滚刀压裂破
一种新型柔臂TBM.pdf
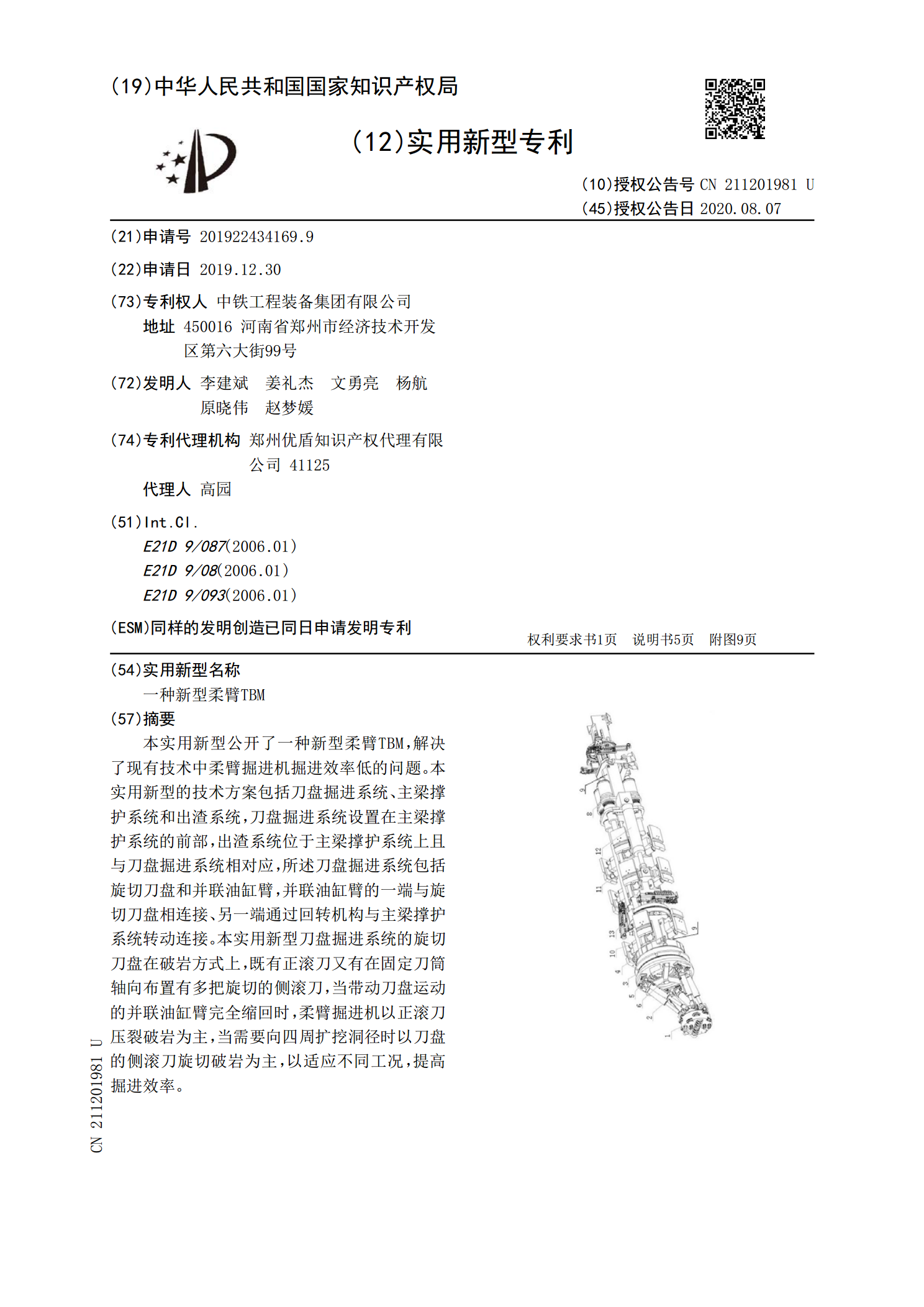
本实用新型公开了一种新型柔臂TBM,解决了现有技术中柔臂掘进机掘进效率低的问题。本实用新型的技术方案包括刀盘掘进系统、主梁撑护系统和出渣系统,刀盘掘进系统设置在主梁撑护系统的前部,出渣系统位于主梁撑护系统上且与刀盘掘进系统相对应,所述刀盘掘进系统包括旋切刀盘和并联油缸臂,并联油缸臂的一端与旋切刀盘相连接、另一端通过回转机构与主梁撑护系统转动连接。本实用新型刀盘掘进系统的旋切刀盘在破岩方式上,既有正滚刀又有在固定刀筒轴向布置有多把旋切的侧滚刀,当带动刀盘运动的并联油缸臂完全缩回时,柔臂掘进机以正滚刀压裂破岩

TBM刀盘掘进载荷影响因素研究.docx
TBM刀盘掘进载荷影响因素研究TBM(TunnelBoringMachine)被广泛应用于隧道建设中,其在隧道开挖中的作用越来越重要。而刀盘作为TBM的重要部分,其载荷影响因素一直受到研究者的关注。本文将从刀盘载荷影响的因素、刀盘载荷控制的策略等方面进行详细的探讨。一、刀盘载荷影响因素1.地质条件刀盘在开挖地质条件变化大的地区,其受到的载荷会增大,因为刀盘在不同地层中钻掘时,需要对不同硬度的土层进行钻掘,而硬度较大的土层会使刀盘的削刀、牙齿或浆泵等零部件产生较大的扭矩和压力。2.刀盘设计刀盘的设计也会影响