
3D结构光相机系统、数据获取方法、设备及存储介质.pdf

瀚玥****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
3D结构光相机系统、数据获取方法、设备及存储介质.pdf
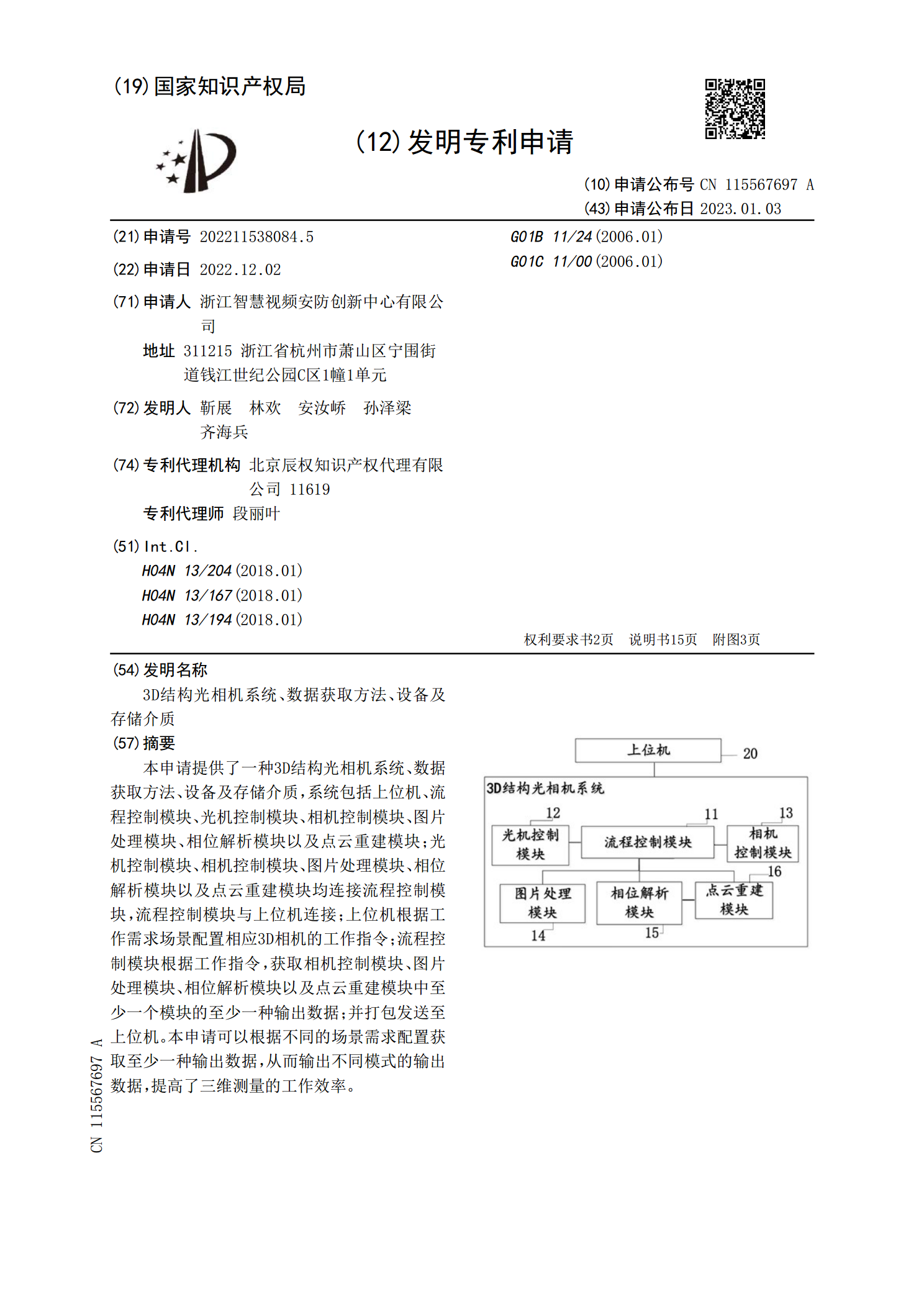
本申请提供了一种3D结构光相机系统、数据获取方法、设备及存储介质,系统包括上位机、流程控制模块、光机控制模块、相机控制模块、图片处理模块、相位解析模块以及点云重建模块;光机控制模块、相机控制模块、图片处理模块、相位解析模块以及点云重建模块均连接流程控制模块,流程控制模块与上位机连接;上位机根据工作需求场景配置相应3D相机的工作指令;流程控制模块根据工作指令,获取相机控制模块、图片处理模块、相位解析模块以及点云重建模块中至少一个模块的至少一种输出数据;并打包发送至上位机。本申请可以根据不同的场景需求配置获取

深度图获取方法、结构光相机、电子设备及存储介质.pdf
本发明实施例涉及计算机视觉领域,公开了一种深度图获取方法、结构光相机、电子设备及存储介质。深度图获取方法包括:当通过主摄像头获取主散斑图的质量不达标时根据候选的n个辅摄像头的排序选取排序第一的辅摄像头,n个辅摄像头的排序根据辅摄像头使用成功次数由大到小确定;根据选取的辅摄像头获取辅散斑图,通过主散斑图和辅散斑图得到深度图;对深度图进行质量评价获取质量评价结果;当深度图质量不达标时按照辅摄像头排序依次重新选取一个辅摄像头,重复执行第二步及之后步骤直至深度图质量达标时,将质量达标深度图作为目标深度图;将深度图

结构光相机获取深度信息的方法、电子设备及存储介质.pdf
本发明实施例涉及图像处理领域,公开了一种结构光相机获取深度信息的方法、电子设备及存储介质,其中方法包括:采用张氏标定法对结构光相机进行双目标定,得到所述结构光相机的内外参数;基于所述内外参数得到计算深度值,并根据所述计算深度值、标定焦距以及测量的实际深度值,采用等比换算得到校准后的真实焦距;基于投射器的等效光心与镜头光心的偏差,对所述结构光相机中的投射器进行位置标定,得到投射器标定位置;基于所述真实焦距和所述投射器标定位置计算深度值。本方案中通过校准得到结构光相机的真实焦距,同时考虑投射器的等效光心与镜头
车载数据存储方法、车载数据获取方法、设备及存储介质.pdf
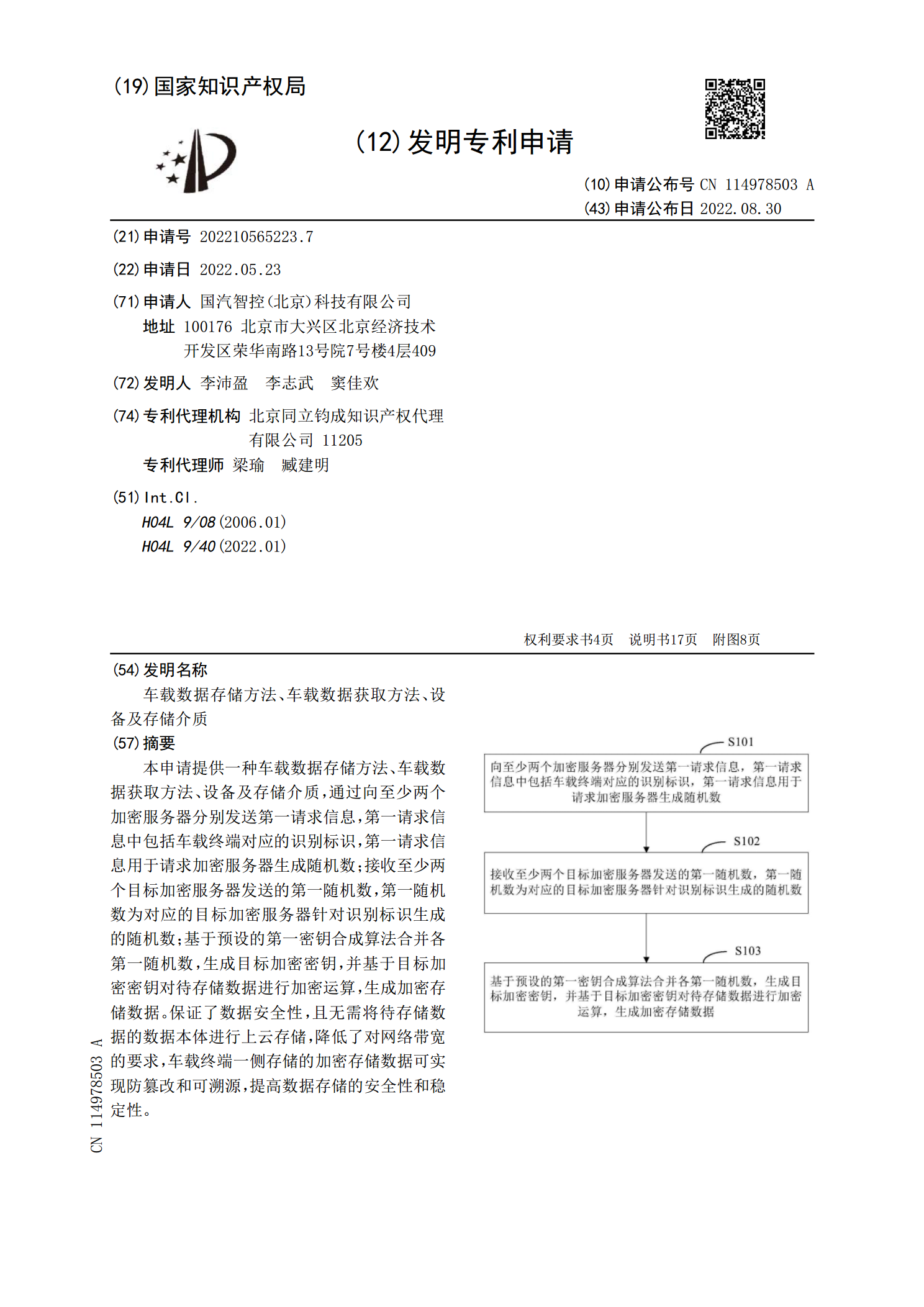
本申请提供一种车载数据存储方法、车载数据获取方法、设备及存储介质,通过向至少两个加密服务器分别发送第一请求信息,第一请求信息中包括车载终端对应的识别标识,第一请求信息用于请求加密服务器生成随机数;接收至少两个目标加密服务器发送的第一随机数,第一随机数为对应的目标加密服务器针对识别标识生成的随机数;基于预设的第一密钥合成算法合并各第一随机数,生成目标加密密钥,并基于目标加密密钥对待存储数据进行加密运算,生成加密存储数据。保证了数据安全性,且无需将待存储数据的数据本体进行上云存储,降低了对网络带宽的要求,车载
数据获取方法、相关设备及存储介质.pdf
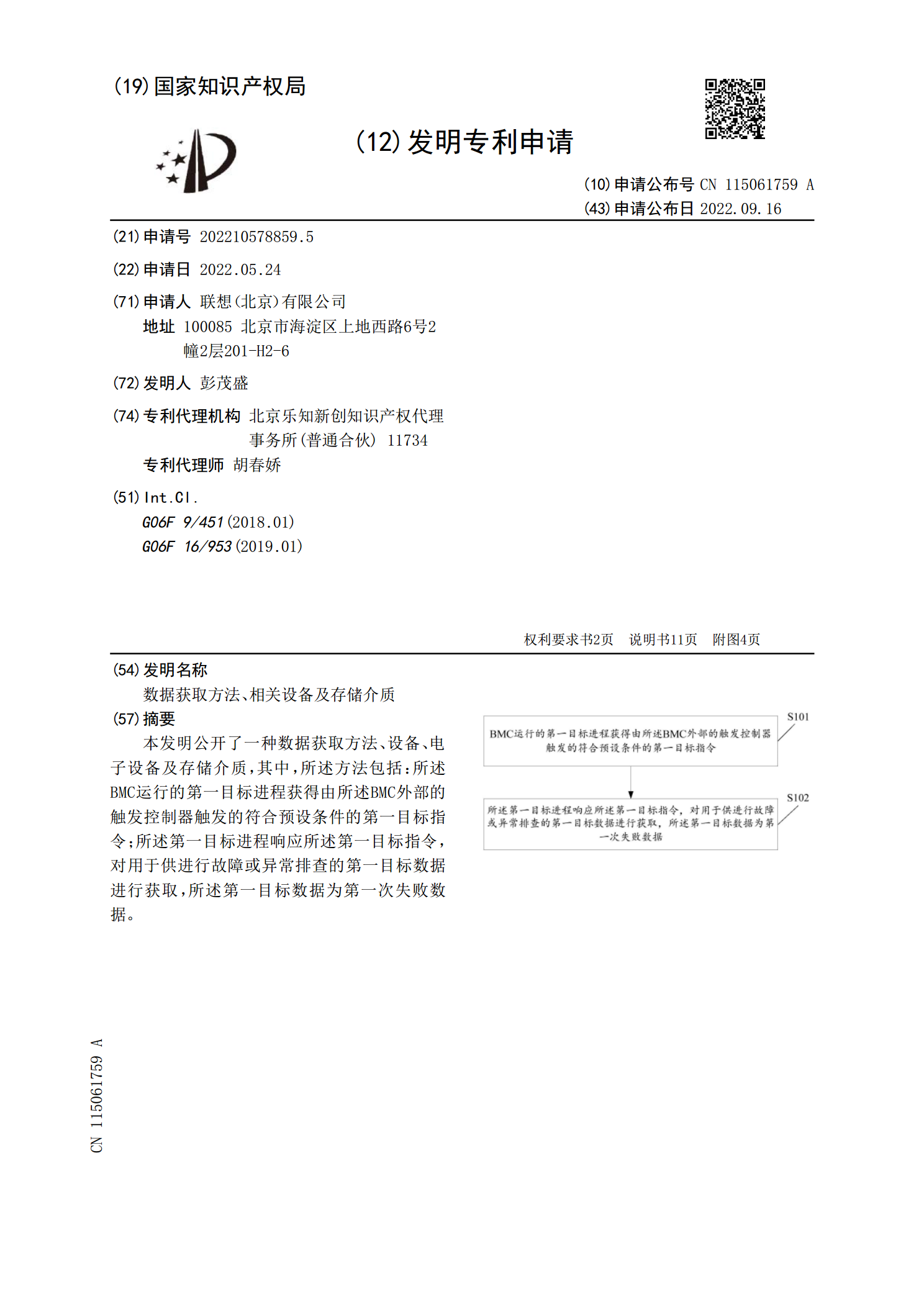
本发明公开了一种数据获取方法、设备、电子设备及存储介质,其中,所述方法包括:所述BMC运行的第一目标进程获得由所述BMC外部的触发控制器触发的符合预设条件的第一目标指令;所述第一目标进程响应所述第一目标指令,对用于供进行故障或异常排查的第一目标数据进行获取,所述第一目标数据为第一次失败数据。