
基于集群空间构架的有人无人机共融集群编队控制方法.pdf

书生****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于集群空间构架的有人无人机共融集群编队控制方法.pdf
本发明公开一种基于集群空间构架的有人/无人机共融集群编队控制方法,包括步骤一:搭建六自由度非线性有人机仿真模型;步骤二:建立无人机简化仿真模型;步骤三:搭建有人/无人机共融集群空间构架;步骤四:设计二阶有人/无人机集群空间控制器;步骤五:设计基于反步法的无人机集群空间控制指令;步骤六:有人机操作员控制指令输入,操作员仅需改变单个变量即可改变整个有人/无人机共融集群的飞行状态。本发明方法面向更为复杂的六自由度非线性有人机模型,具有实际应用价值;本发明方法促进了有人机操作员更简捷、高效地监督和控制无人机集群运

基于联盟的无人机集群编队控制方法.docx
基于联盟的无人机集群编队控制方法基于联盟的无人机集群编队控制方法摘要:随着无人机技术的快速发展,无人机集群编队控制成为无人机领域的研究热点之一。为了实现高效、安全、灵活的无人机编队控制,本文提出了一种基于联盟的无人机集群编队控制方法。该方法通过建立动态联盟关系,实现无人机之间的协同工作和任务分配。通过实验验证,该方法能够有效提高无人机编队的任务完成效率,实现编队控制的高级功能。关键词:无人机集群编队,联盟,协同工作,任务分配1.引言近年来,无人机技术发展迅速,无人机集群编队控制成为无人机领域的研究热点之一
基于固定翼的无人机集群系统的队形重构编队控制方法.pdf
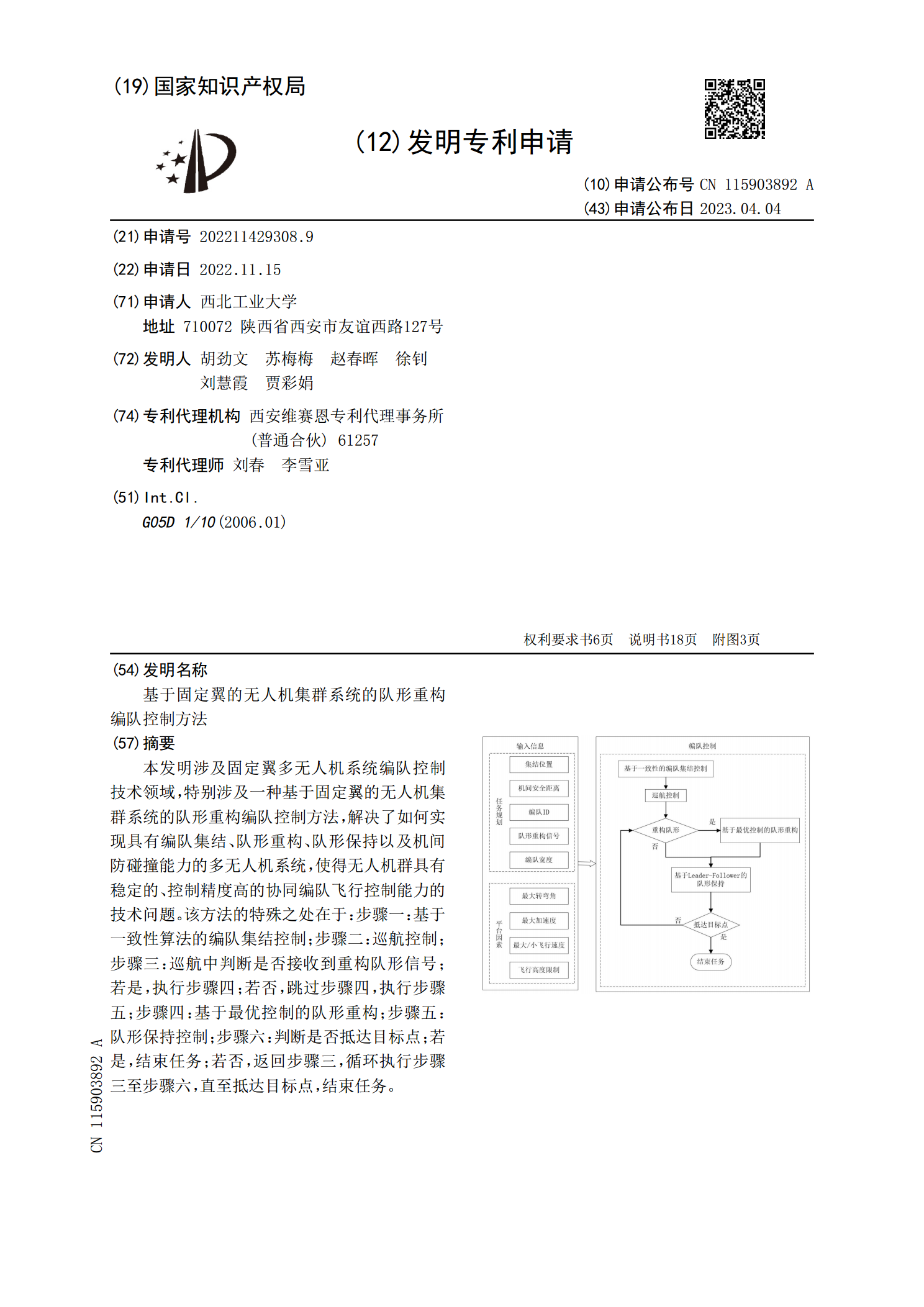
本发明涉及固定翼多无人机系统编队控制技术领域,特别涉及一种基于固定翼的无人机集群系统的队形重构编队控制方法,解决了如何实现具有编队集结、队形重构、队形保持以及机间防碰撞能力的多无人机系统,使得无人机群具有稳定的、控制精度高的协同编队飞行控制能力的技术问题。该方法的特殊之处在于:步骤一:基于一致性算法的编队集结控制;步骤二:巡航控制;步骤三:巡航中判断是否接收到重构队形信号;若是,执行步骤四;若否,跳过步骤四,执行步骤五;步骤四:基于最优控制的队形重构;步骤五:队形保持控制;步骤六:判断是否抵达目标点;若是

仿候鸟进化雪堆博弈的无人机自主集群编队轮换控制方法.pdf
本发明是一种仿候鸟进化雪堆博弈的无人机自主集群编队轮换控制方法,其实现步骤为:步骤一:初始化;步骤二:基于候鸟进化雪堆博弈确定无人机飞行模式;步骤三:确定引导机及其相对僚机的期望位置;步骤四:运行无人机模型;步骤五:判断是否结束仿真;该方法旨在提供一种分布式的无人机自主集群编队轮换控制方法,在提高无人机集群在编队自主轮换过程中的鲁棒性和适应性,从而有效提高无人机远距离任务执行能力水平。

基于自适应有限时间干扰观测器的无人机集群编队控制方法.docx
基于自适应有限时间干扰观测器的无人机集群编队控制方法基于自适应有限时间干扰观测器的无人机集群编队控制方法摘要:无人机集群编队控制是无人机技术应用中重要的研究领域之一。本论文提出了一种基于自适应有限时间干扰观测器的无人机集群编队控制方法。在此方法中,利用干扰观测器来估计无人机间的干扰力,通过引入自适应控制策略来实现无人机编队控制,进而实现无人机集群编队控制目标。关键词:无人机集群编队控制,干扰观测器,自适应控制策略,编队控制目标1.引言无人机技术的快速发展使得无人机应用场景愈加广泛,无人机集群编队控制作为其