
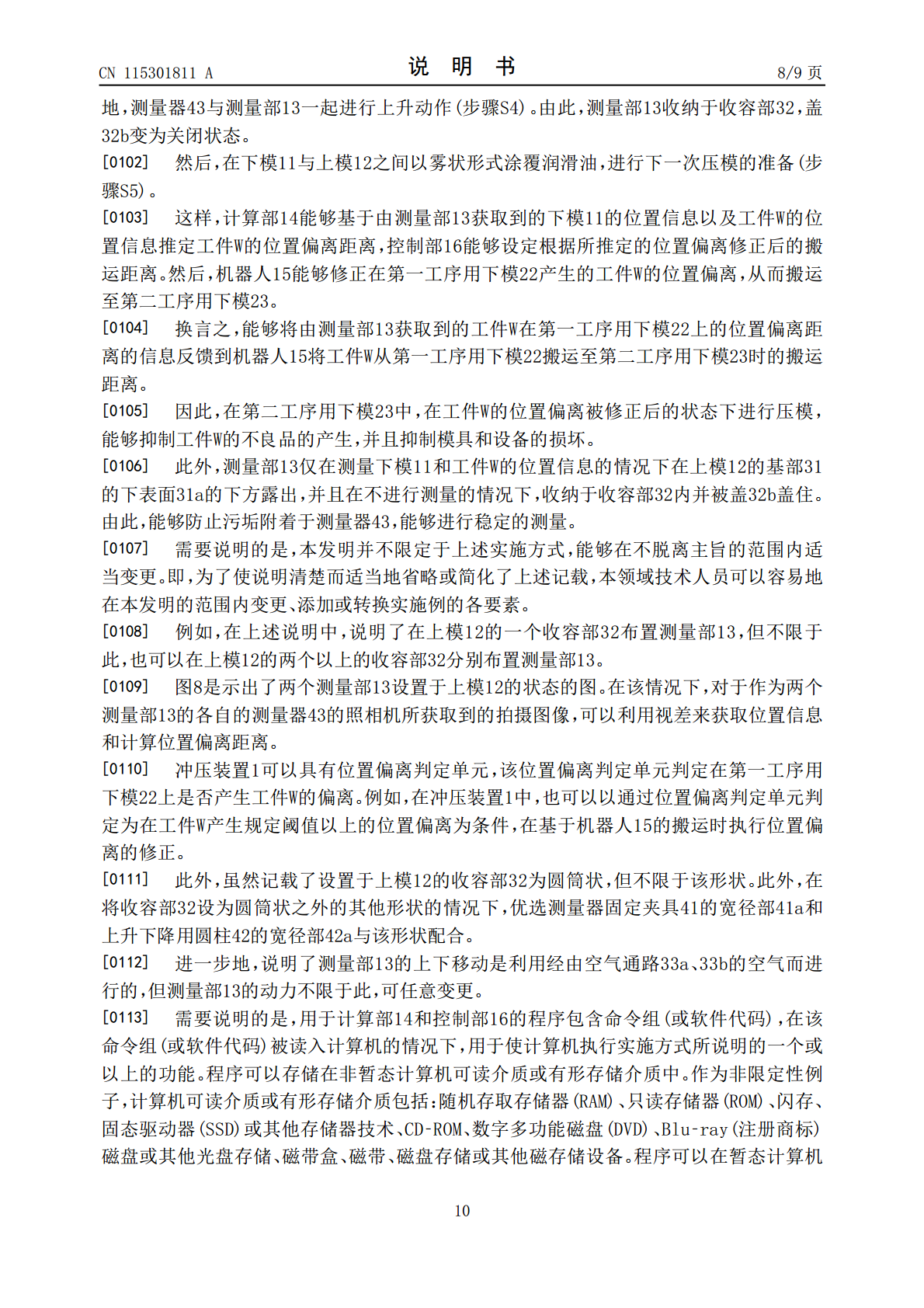
冲压装置及其动作控制方法.pdf

是湛****21

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

冲压装置及其动作控制方法.pdf
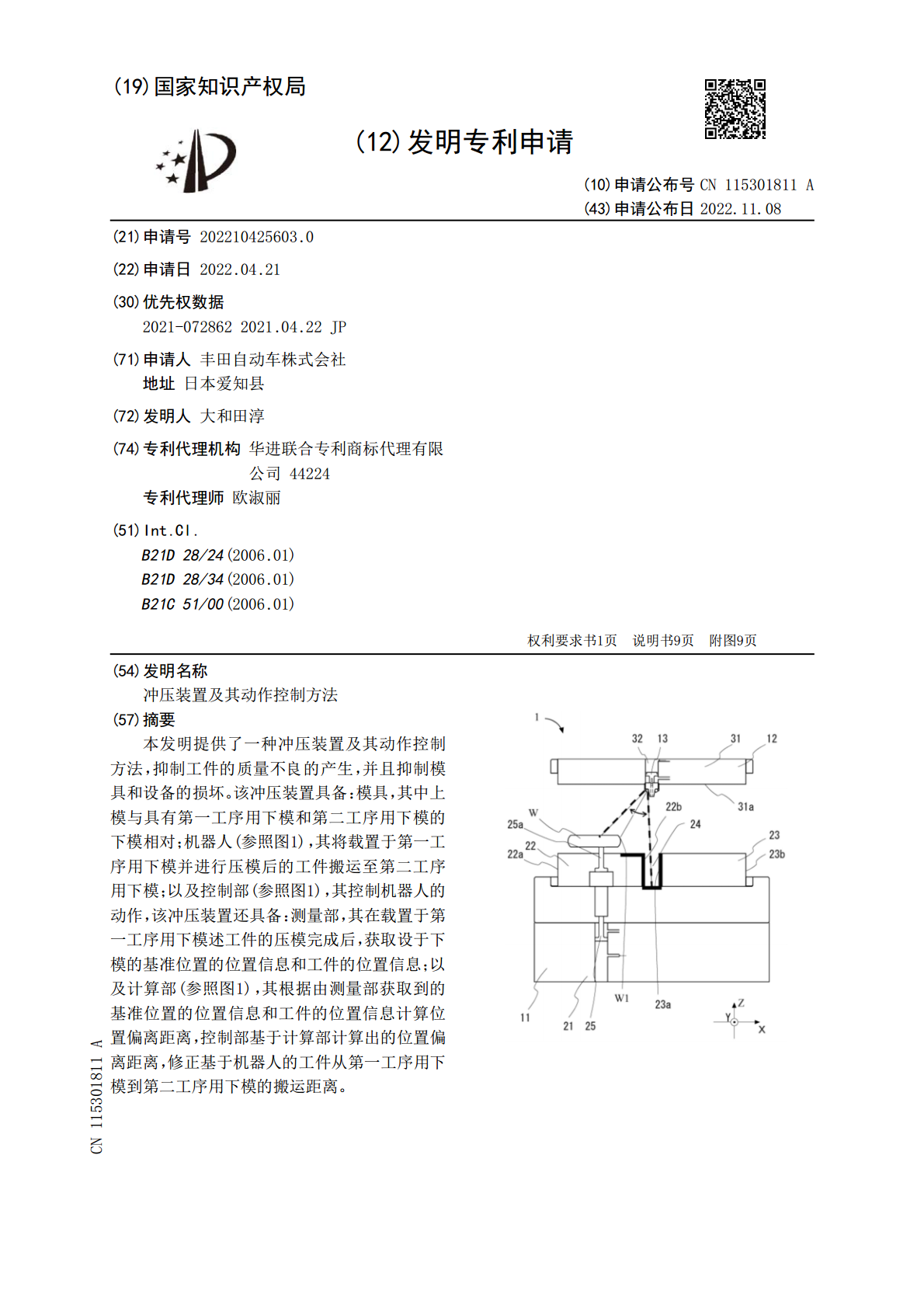
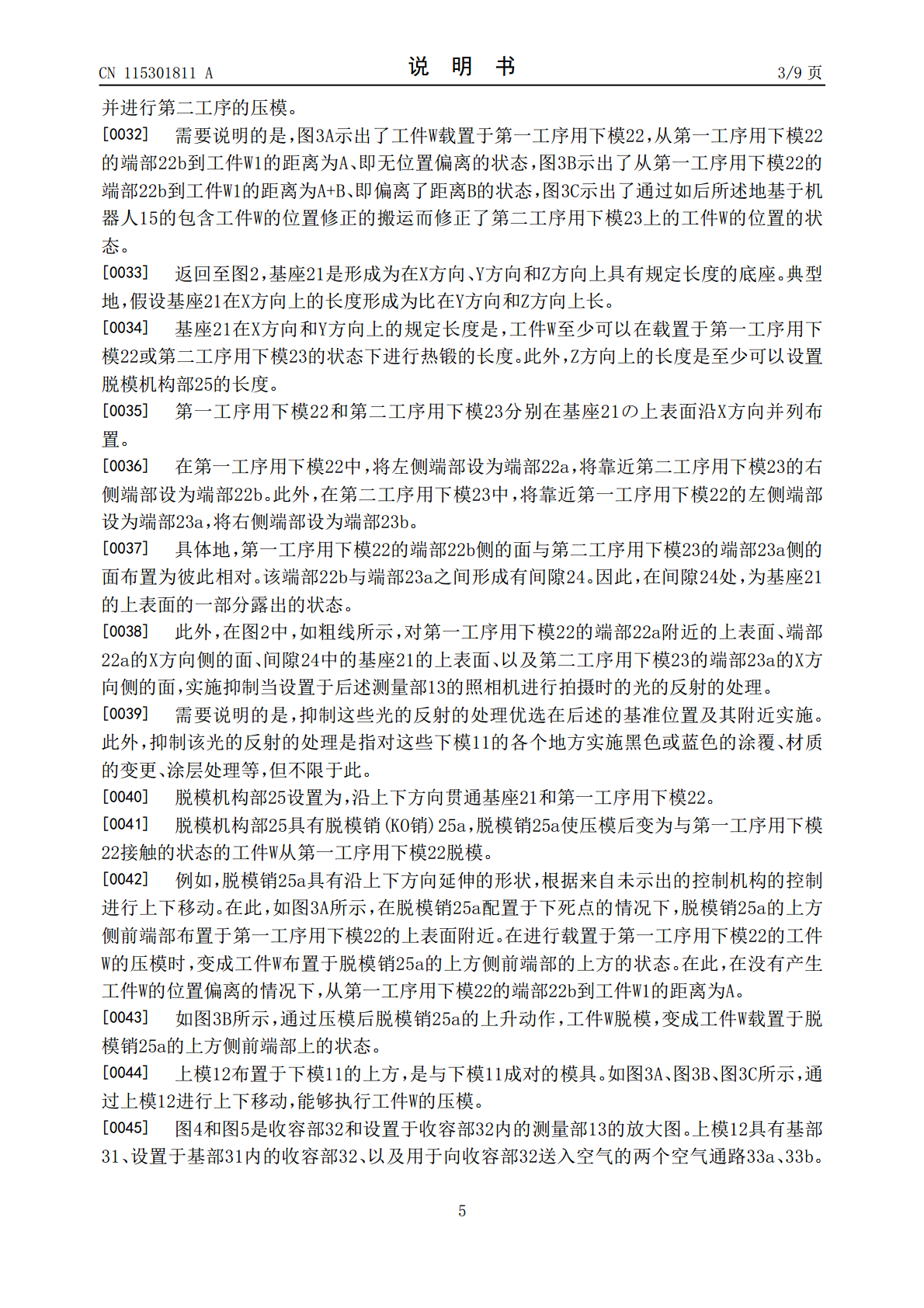
本发明提供了一种冲压装置及其动作控制方法,抑制工件的质量不良的产生,并且抑制模具和设备的损坏。该冲压装置具备:模具,其中上模与具有第一工序用下模和第二工序用下模的下模相对;机器人(参照图1),其将载置于第一工序用下模并进行压模后的工件搬运至第二工序用下模;以及控制部(参照图1),其控制机器人的动作,该冲压装置还具备:测量部,其在载置于第一工序用下模述工件的压模完成后,获取设于下模的基准位置的位置信息和工件的位置信息;以及计算部(参照图1),其根据由测量部获取到的基准位置的位置信息和工件的位置信息计算位置偏

感应加热装置及其控制部、及其动作方法.pdf
提供能够自动地开始气溶胶形成基体的加热的感应加热装置。用于构成为对包括接受器110和气溶胶源112的气溶胶形成基体108的接受器110进行感应加热的感应加热装置的控制部118构成为,在执行感应加热的期间不能够检测接受器110的情况下,停止感应加热,或者,进行通知错误。
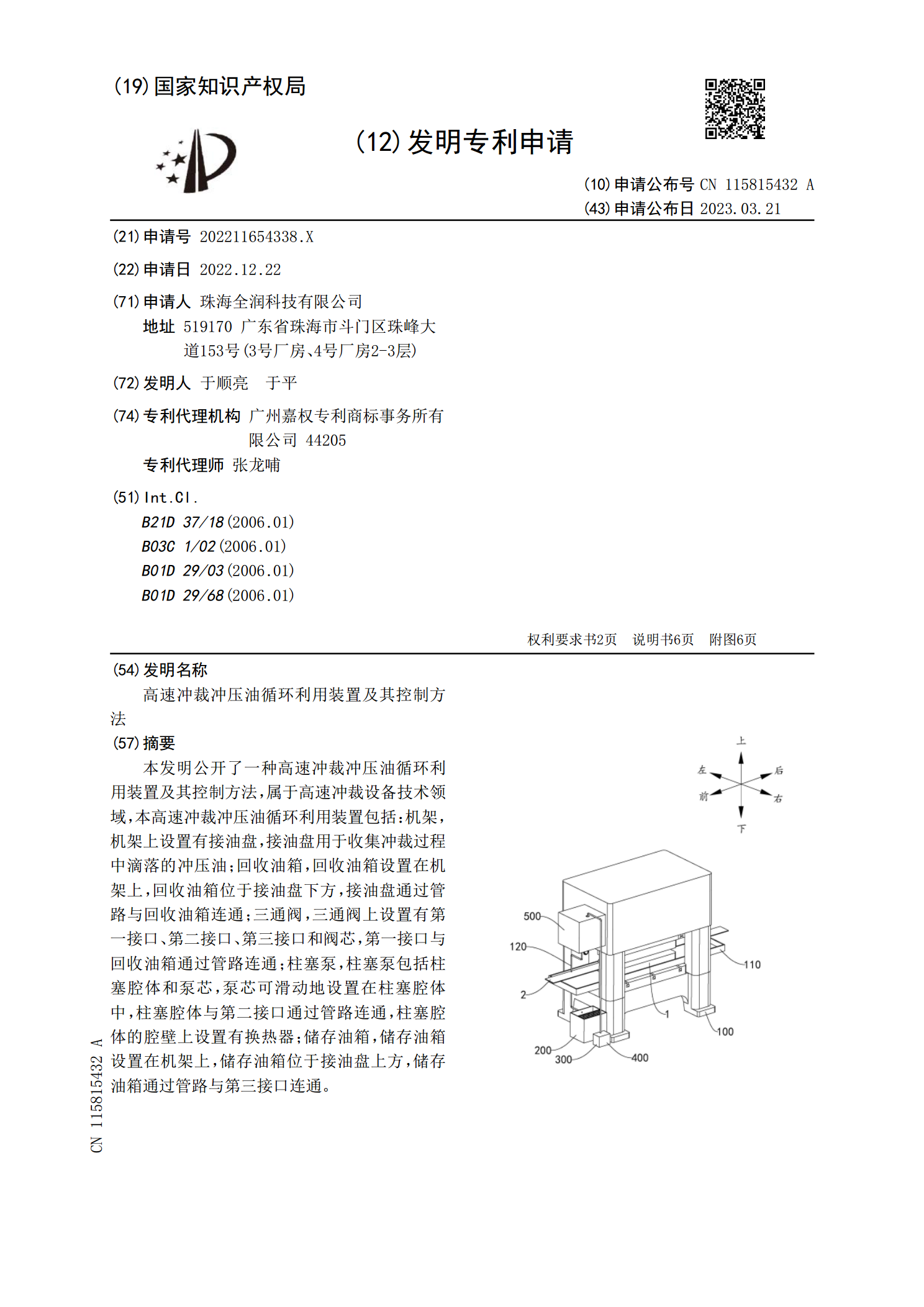
高速冲裁冲压油循环利用装置及其控制方法.pdf
本发明公开了一种高速冲裁冲压油循环利用装置及其控制方法,属于高速冲裁设备技术领域,本高速冲裁冲压油循环利用装置包括:机架,机架上设置有接油盘,接油盘用于收集冲裁过程中滴落的冲压油;回收油箱,回收油箱设置在机架上,回收油箱位于接油盘下方,接油盘通过管路与回收油箱连通;三通阀,三通阀上设置有第一接口、第二接口、第三接口和阀芯,第一接口与回收油箱通过管路连通;柱塞泵,柱塞泵包括柱塞腔体和泵芯,泵芯可滑动地设置在柱塞腔体中,柱塞腔体与第二接口通过管路连通,柱塞腔体的腔壁上设置有换热器;储存油箱,储存油箱设置在机架

数字人动作控制方法及其装置、设备、介质、产品.pdf
本申请涉及一种数字人动作控制方法及其装置、设备、介质、产品,所述方法包括:获取用于控制数字人运动相对应的动作文件,该动作文件包括所述数字人的运动图像中各个图像帧相对应的信息帧,所述信息帧存储数字人的骨骼关键点的位置信息;根据所述各个信息帧中的骨骼关键点的位置信息实施动作异常检测,确定其中存在描述动作异常现象的动作异常片段,所述动作异常片段包括一个或多个时序连续的所述信息帧;修正所述动作异常片段以克服所述动作异常现象;应用所述动作文件驱动所述数字人运动,以产生所述运动图像。本申请对用于驱动数字人运动的动作文
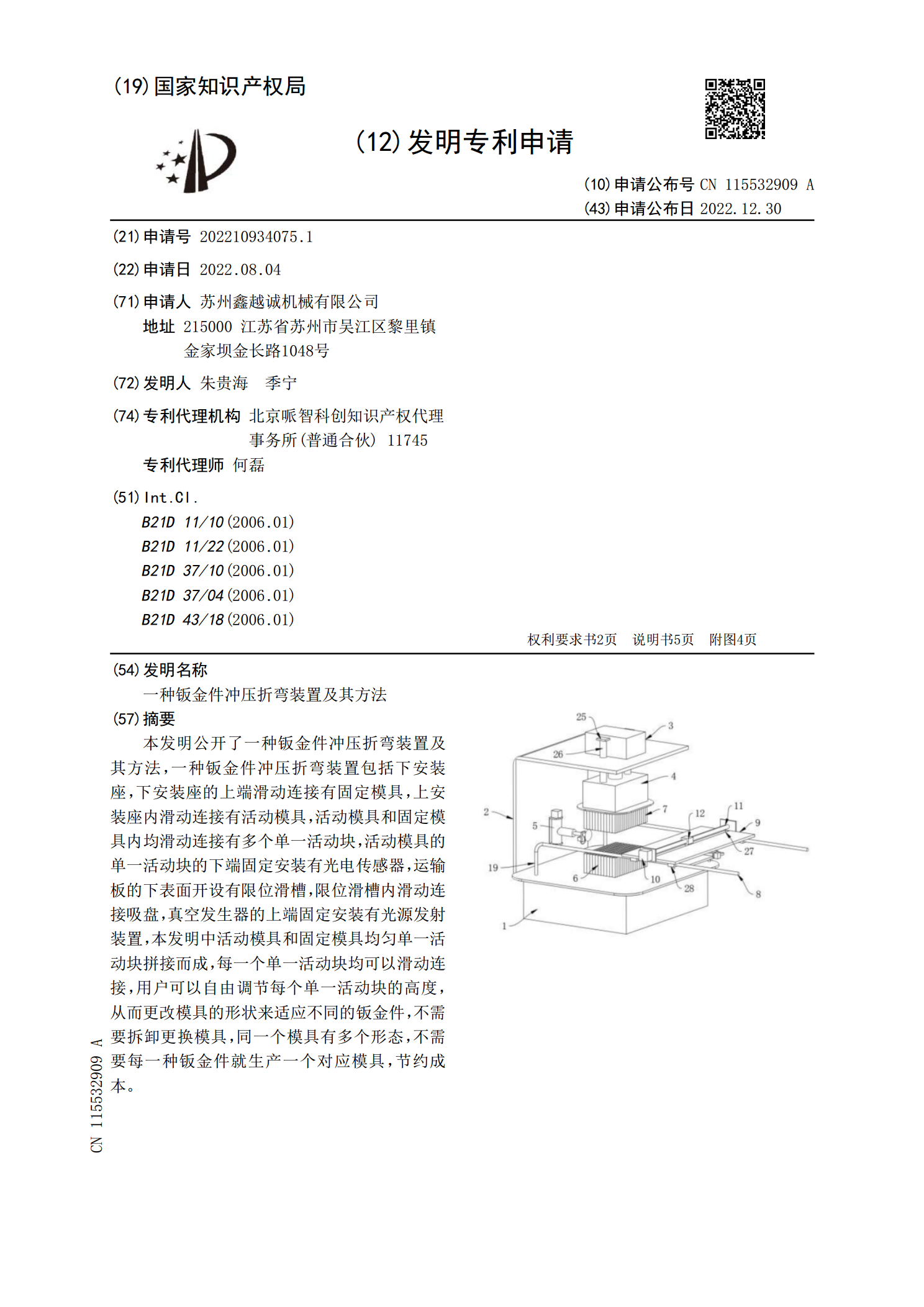
一种钣金件冲压折弯装置及其方法.pdf
本发明公开了一种钣金件冲压折弯装置及其方法,一种钣金件冲压折弯装置包括下安装座,下安装座的上端滑动连接有固定模具,上安装座内滑动连接有活动模具,活动模具和固定模具内均滑动连接有多个单一活动块,活动模具的单一活动块的下端固定安装有光电传感器,运输板的下表面开设有限位滑槽,限位滑槽内滑动连接吸盘,真空发生器的上端固定安装有光源发射装置,本发明中活动模具和固定模具均匀单一活动块拼接而成,每一个单一活动块均可以滑动连接,用户可以自由调节每个单一活动块的高度,从而更改模具的形状来适应不同的钣金件,不需要拆卸更换模具