
基于视觉的机器人抓取系统应用研究综述.docx

92****sc

1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共48页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于视觉的机器人抓取系统应用研究综述.docx
基于视觉的机器人抓取系统应用研究综述一、概述随着机器人技术的迅猛发展,机器人抓取系统作为实现机器人与环境交互的关键环节,受到了广泛关注。视觉作为机器人感知外部环境的主要方式之一,对于提高机器人抓取的准确性和鲁棒性具有重要意义。基于视觉的机器人抓取系统应用研究成为了机器人技术领域的热点之一。基于视觉的机器人抓取系统通过获取目标物体的视觉信息,如位置、姿态、形状等,实现对目标物体的精准定位和抓取。该系统通常包括视觉感知模块、运动规划模块和执行模块等部分,通过各模块之间的协同工作,实现对目标物体的有效抓取。近年

基于机器视觉的工业机器人抓取系统的研究.docx
基于机器视觉的工业机器人抓取系统的研究标题:基于机器视觉的工业机器人抓取系统研究摘要:随着工业自动化的不断发展,工业机器人在生产线上发挥着越来越重要的作用。而抓取系统作为工业机器人的一项基本功能,在保证高效运作和安全生产方面起着至关重要的作用。然而,传统的抓取系统常常受限于精度、稳定性和适应性等问题,难以适应复杂多变的工作环境。因此,本论文以基于机器视觉的工业机器人抓取系统为研究对象,探索如何利用机器视觉技术解决抓取系统中的问题,提出一种更加精确、灵活、高效的抓取系统。关键词:机器视觉,工业机器人,抓取系

基于机器视觉的工业机器人抓取系统研究.docx
基于机器视觉的工业机器人抓取系统研究随着工业自动化技术的不断发展,工业机器人已经逐渐成为了现代工业的主流工具之一。工业机器人以其高效、准确、稳定等特点,为企业带来了巨大的经济效益。然而,要想实现工业机器人的自主化操作,关键技术之一便是视觉识别技术。工业机器人抓取系统是机器视觉技术应用于工业机器人领域的一个重要代表。工业机器人抓取系统使用视觉识别技术,实现对工件的自动识别和抓取。传统的机器人抓取系统需要通过编程方式进行操作,难以适应不同工件的应用。而基于机器视觉的工业机器人抓取系统则可以实现机器人对不同形状

基于嵌入式机器视觉的机器人抓取系统.docx
基于嵌入式机器视觉的机器人抓取系统基于嵌入式机器视觉的机器人抓取系统摘要:随着机器人技术的不断发展,机器人在日常生活和工业生产中扮演着越来越重要的角色。机器人的抓取能力是机器人实现自主操作和与环境交互的关键因素之一。本论文介绍了一种基于嵌入式机器视觉的机器人抓取系统。该系统通过嵌入式视觉处理单元实时感知和分析环境中的目标物体,然后结合机器人运动控制算法,实现对目标物体的准确抓取。关键词:嵌入式机器视觉;机器人抓取系统;目标感知;运动控制1.引言机器人在工业生产、医疗护理、物流等领域发挥着重要作用。而机器人
基于3D视觉的机器人自动抓取系统及方法.pdf
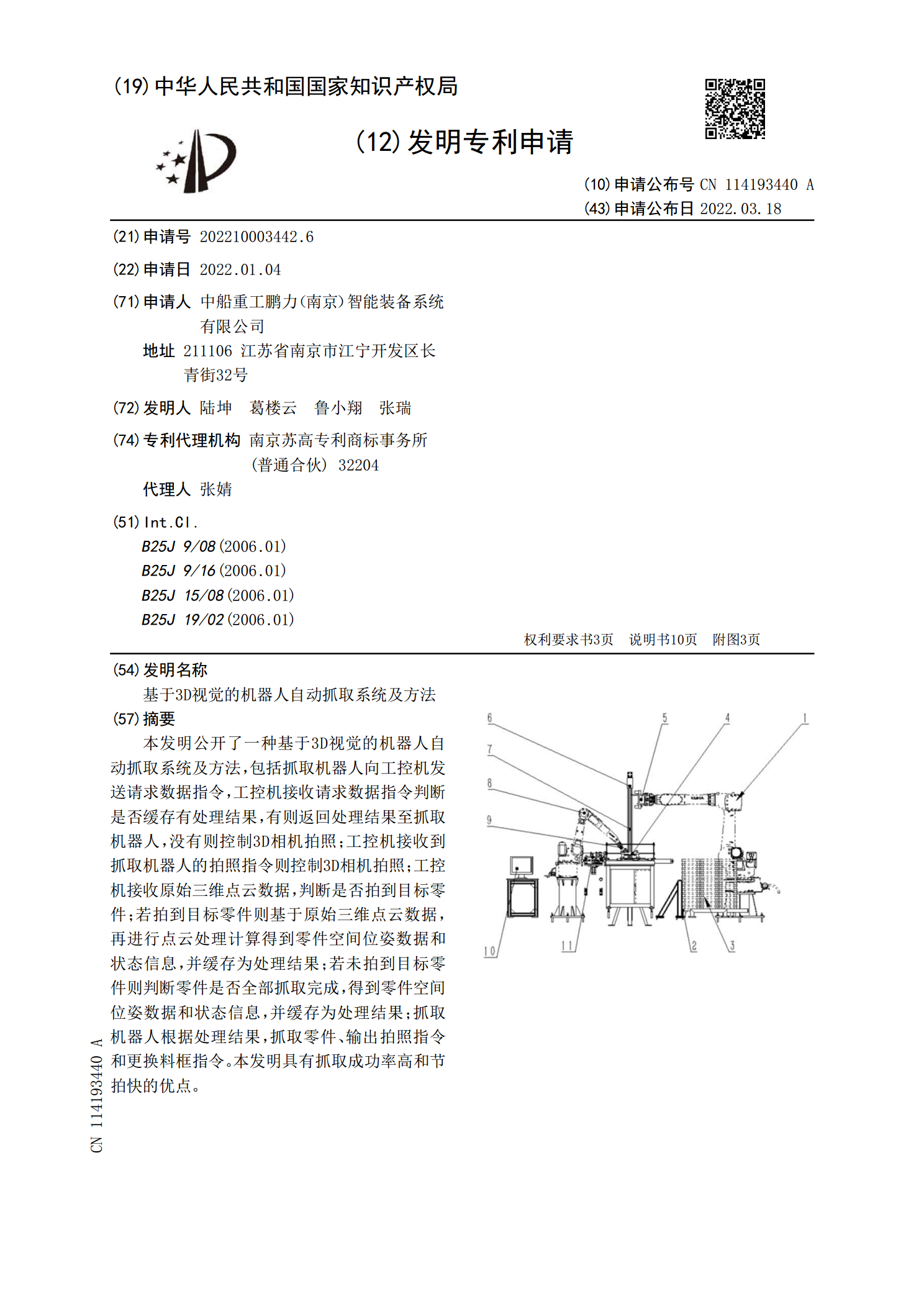
本发明公开了一种基于3D视觉的机器人自动抓取系统及方法,包括抓取机器人向工控机发送请求数据指令,工控机接收请求数据指令判断是否缓存有处理结果,有则返回处理结果至抓取机器人,没有则控制3D相机拍照;工控机接收到抓取机器人的拍照指令则控制3D相机拍照;工控机接收原始三维点云数据,判断是否拍到目标零件;若拍到目标零件则基于原始三维点云数据,再进行点云处理计算得到零件空间位姿数据和状态信息,并缓存为处理结果;若未拍到目标零件则判断零件是否全部抓取完成,得到零件空间位姿数据和状态信息,并缓存为处理结果;抓取机器人根