
一种可重构航天器模块单元构型布局设计方法.pdf

青团****青吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可重构航天器模块单元构型布局设计方法.pdf
本发明公开了一种可重构航天器模块单元构型布局设计方法,包括:步骤1,确定针对可重构航天器模块单元的系统指标需求;步骤2,根据确定的系统指标需求,对可重构航天器模块单元的结构型式规格进行设计;步骤3,根据确定的系统指标需求,对标准对接接口的型式规格进行设计;步骤4,根据确定的系统指标需求,对内部载荷在模块结构本体上的安装位置进行设计;步骤5,检查步骤2~4的设计结果是否满足系统指标需求及任务需求,如不满足,则重复执行步骤2~4,对步骤2~4的设计进行迭代优化。本发明能够根据可重构航天器模块单元的指标要求快速

一种微纳航天器编队的故障构型重构方法.docx
一种微纳航天器编队的故障构型重构方法Title:FaultConfigurationRefinementMethodforMicroandNanoSatelliteSwarmFormationAbstract:MicroandnanosatelliteshavegainedsignificantattentioninrecentyearsduetotheirpotentialapplicationsinvariousfieldsrangingfromcommunicationandEarthobserva

可重构液压自伺服机器人模块设计、构型研究及运动分析.docx
可重构液压自伺服机器人模块设计、构型研究及运动分析摘要本文基于可重构液压自伺服机器人模块的设计、构型研究及运动分析。这是一种新型的液压机器人结构,通过对其构型和动力学进行分析,可以对其运动特性进行研究,从而为其进一步的研究提供理论基础。该研究结果表明,基于该结构设计的液压机器人模块具有较高的运动精度和响应速度,可以应用于各种高精度机器人系统。关键词:可重构液压机器人模块;构型研究;运动分析引言近年来,液压机器人已成为机器人领域中的研究热点之一。液压机器人由于具有运动速度快、负载能力强、控制精度高等优点,广

可重构球面并联机构的构型设计与工作空间求解方法.docx
可重构球面并联机构的构型设计与工作空间求解方法可重构球面并联机构的构型设计与工作空间求解方法摘要:球面并联机构是一种具有多自由度并可以在球面上实现工作的机构,具有广泛的应用前景。本文针对可重构球面并联机构的构型设计和工作空间求解方法进行了综述和分析。首先介绍了球面并联机构的基本概念和特点,接着对球面并联机构的构型进行了分类和描述,并提出了一种基于连杆参数的构型设计方法。随后,针对球面并联机构的工作空间求解问题,分析了其数学模型,并介绍了一种基于解析方法的工作空间求解方法。最后,通过实例验证了所提出方法的有
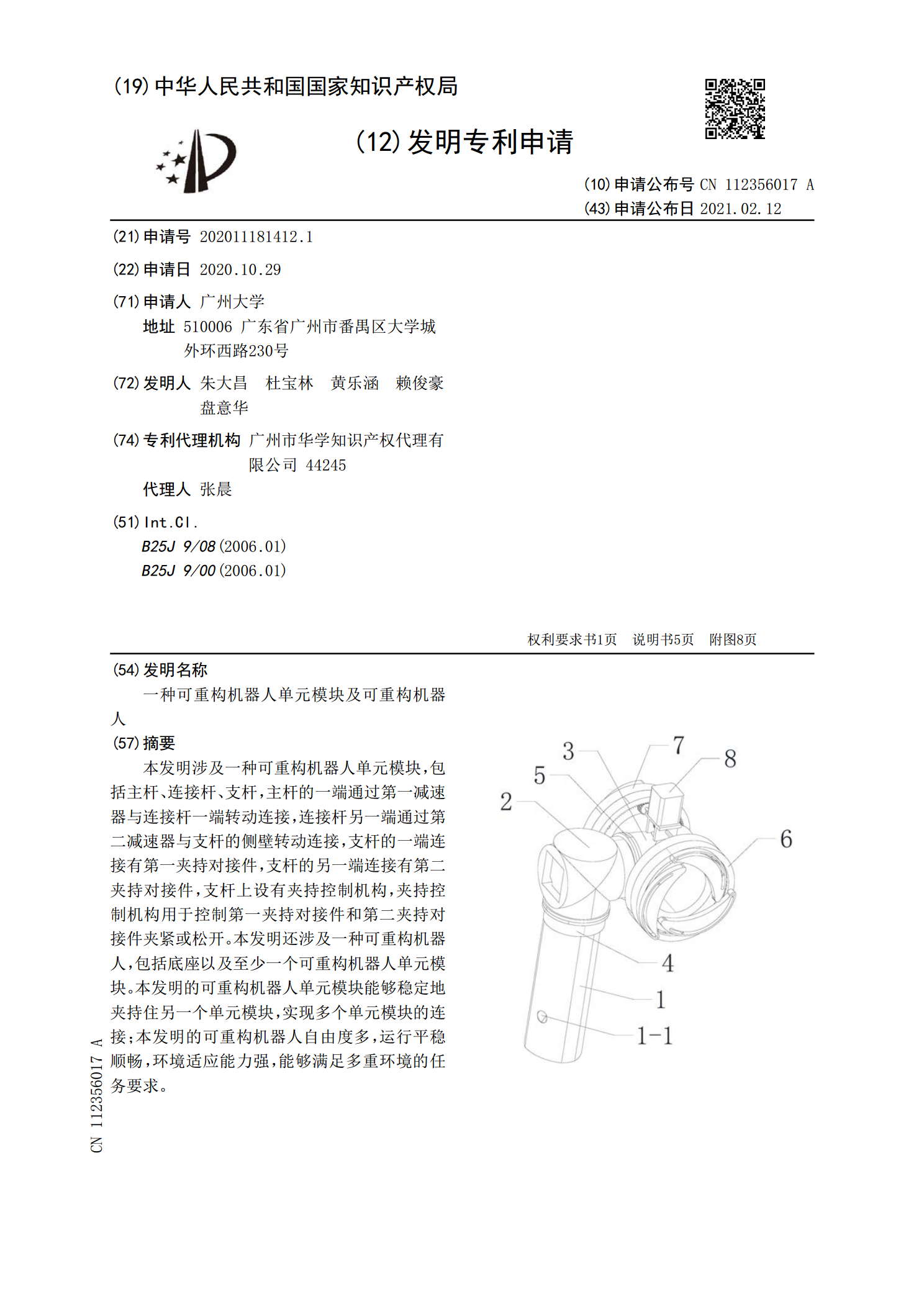
一种可重构机器人单元模块及可重构机器人.pdf
本发明涉及一种可重构机器人单元模块,包括主杆、连接杆、支杆,主杆的一端通过第一减速器与连接杆一端转动连接,连接杆另一端通过第二减速器与支杆的侧壁转动连接,支杆的一端连接有第一夹持对接件,支杆的另一端连接有第二夹持对接件,支杆上设有夹持控制机构,夹持控制机构用于控制第一夹持对接件和第二夹持对接件夹紧或松开。本发明还涉及一种可重构机器人,包括底座以及至少一个可重构机器人单元模块。本发明的可重构机器人单元模块能够稳定地夹持住另一个单元模块,实现多个单元模块的连接;本发明的可重构机器人自由度多,运行平稳顺畅,环境