
激光多普勒测速.ppt

和蔼****娘子


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共164页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

激光多普勒测速.ppt
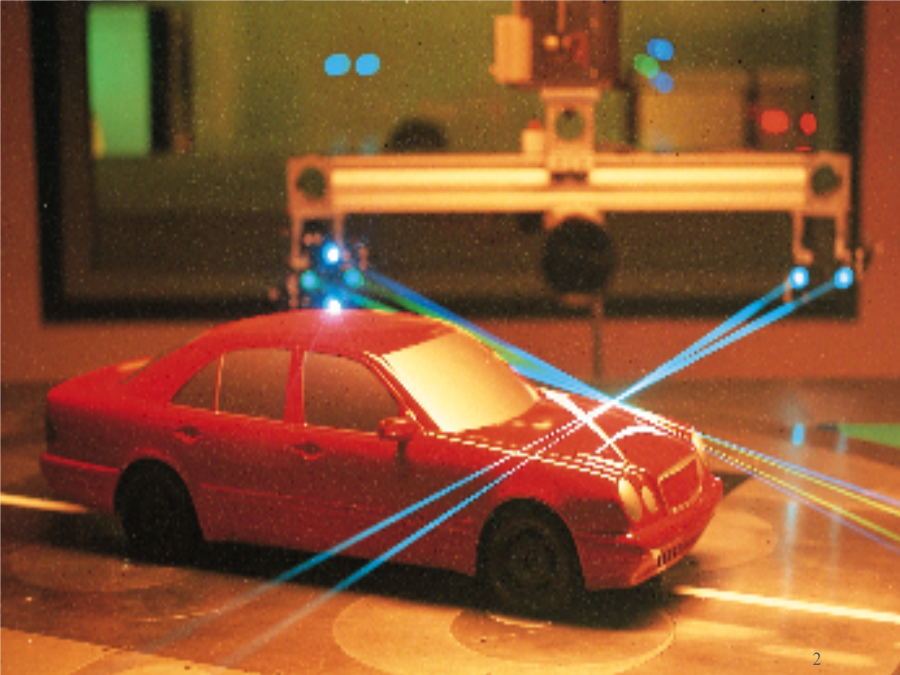
25-9激光多普勒流速仪测速1.概述-激光特性与应用激光是完全新颖的光源,它以高亮度(比太阳光亮1010倍)、高纯度(单色性,比氪灯纯上万倍)、高方向性(既相干性)而著称。因为普通光源向4立体角发散,而激光的发散角只有10-6rad,因而单位立体角单位面积的输出功率就特别大。激光在工程中的应用激光在热物理测量方面应用常见的测量速度方法与技术无疑,机械探头将继续是实验流体力学的重要方法。但接触测量法干扰流场,不可避免地带有方法本身的误差,具有局限性。如对回流区的测量,机械探头会扰动回流图形;对于小尺寸管道

激光多普勒测速.pptx

激光多普勒测速装置.pdf
一种激光多普勒测速装置,用于测量运动物体的运动速度,该装置包括激光器、分光镜、第一反射镜和第二反射镜,激光器发射的激光光束经由分光镜分为二束,该二束激光又分别经过第一反射镜和第二反射镜的反射同时照射到运动物体上的P点。所述装置还包括透镜和探测器,透镜将运动物体上的P点光斑聚焦到探测器,通过获得拍频的频率测得运动物体的速度。所述装置还包括激光位移传感器,用于测得所述装置与运动物体之间的间距,该间距的变化量用于调整第一反射镜和第二反射镜。
激光多普勒测速讲解.ppt
第6章激光在精密测量中的应用(3)6.5激光多普勒测速运动微粒上接收到的光源入射光的频率静止接收器上接收到的运动微粒散射光的频率差频法测速参考光束型多普勒测速参考光束型多普勒测速(续)双散射光束型多普勒测速血液流速的测量光纤多普勒测速仪原理图管道内水流的测量环形激光精密测角光纤陀螺第5章典型激光器介绍固体激光器Nd3+:YAG激光器气体激光器典型气体激光器(续)典型气体激光器(续)染料激光器半导体激光器其它激光器

激光多普勒测速和激光测距.pptx