
PMSM和BLDC电机演示幻灯片.ppt

和蔼****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共51页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

PMSM和BLDC电机演示幻灯片.ppt
内容提要PMSM和BLDC电机的特点缺点PMSM和BLDC电机的应用范围交通运输霍尔传感器定子转子PMSM按转子永磁体的结构可分为两种(2)内埋式(IPMSM)无刷直流电机正弦波永磁同步电机PMSM的数学模型假设:1)忽略电动机铁心的饱和;2)不计电动机中的涡流和磁滞损耗;3)转子无阻尼绕组。永磁同步电动机在三相定子参考坐标系中的数学模型可以表达如下:永磁同步电动机在坐标系中的数学模型可以表达如下:永磁同步电动机在转子旋转坐标系d-q中的数学模型可以表达如下:每一瞬间有两个功率开关导通,每隔60度换相一次
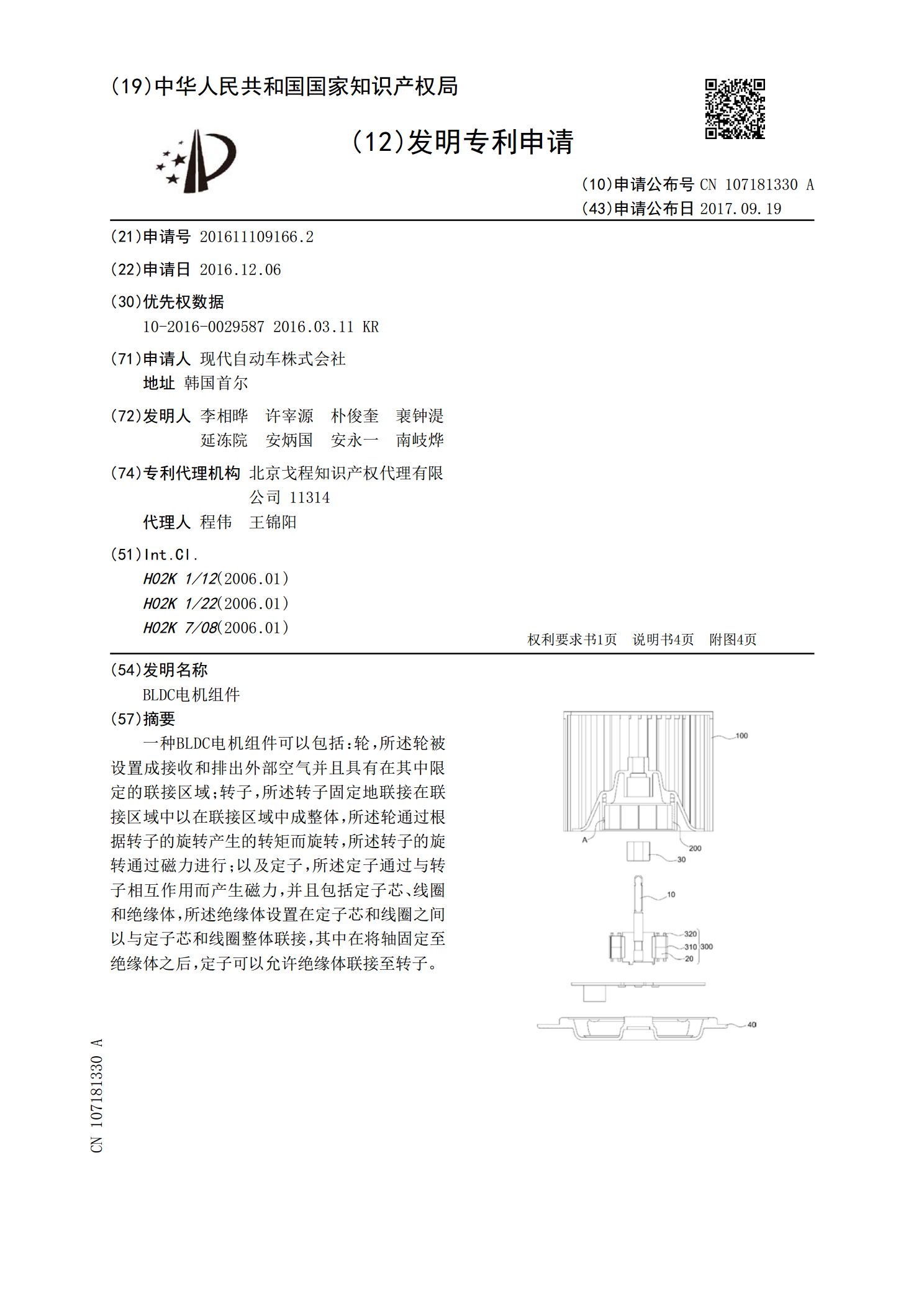
BLDC电机组件.pdf
一种BLDC电机组件可以包括:轮,所述轮被设置成接收和排出外部空气并且具有在其中限定的联接区域;转子,所述转子固定地联接在联接区域中以在联接区域中成整体,所述轮通过根据转子的旋转产生的转矩而旋转,所述转子的旋转通过磁力进行;以及定子,所述定子通过与转子相互作用而产生磁力,并且包括定子芯、线圈和绝缘体,所述绝缘体设置在定子芯和线圈之间以与定子芯和线圈整体联接,其中在将轴固定至绝缘体之后,定子可以允许绝缘体联接至转子。
发电机讲稿演示幻灯片.ppt
同步发电机及其运行同步发电机及其运行目录第一节概述第二节QFSN—300—2型同步发电机结构特点发电机剖视图1。机座:防护支承密封耐压防爆防振2。定子铁心:轴向分段径向通风端部呈阶梯型3。定子线圈水内冷:空心导体与实心导体组合而成定子线圈水内冷水路连接为并联单流水路水电接头卧式弹簧板隔振结构1。定子冲片涂带无机填料的绝缘漆铁心绝缘可靠(F级绝缘)2。铁芯端部采用整体压圈和全铜屏蔽端部温度降低(梯形)3。定子铁芯与机座间弹性支承良好的隔振动效果铁芯叠片已经完工的定子铁芯定子线圈定子线圈的槽内固定定子线圈水电

电机基础知识演示幻灯片.ppt
电机基础知识讲解一、电机定义电动机电动机三、常见电动机讲解无刷直流电动机是采用半导体开关器件来实现电子换向的,如图1所示,即用电子开关器件代替传统的接触式换向器和电刷。它具有可靠性高、无换向火花、机械噪声低等优点,广泛应用于高档录音座、录像机、电子仪器及自动化办公设备中。无刷直流电动机由永磁体转子、多极绕组定子、位置传感器等组成,如图2所示。位置传感按转子位置的变化,沿着一定次序对定子绕组的电流进行换流(即检测转子磁极相对定子绕组的位置,并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关

直线电机的工作原理演示幻灯片.ppt
直线电机的工作原理直线电机是一种通过将封闭式磁场展开为开放式磁场,将电能直接转化为直线运动的机械能,而不需要任何中间转换机构的传动装置直线电机的结构直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,当初级通入电流后,在初次级之间的气隙中产生行波磁场,在行波磁场与次级永磁体的作用下产生驱动力,从而实现运动部件的直线运动。近几年来,世界上一些发达国家开始将直线电机技术应用于数控机床直线运动驱动系统中,代替传统的伺服电机+