
一种智能采棉机器人及其采棉作业路径规划方法.pdf

是向****23

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能采棉机器人及其采棉作业路径规划方法.pdf
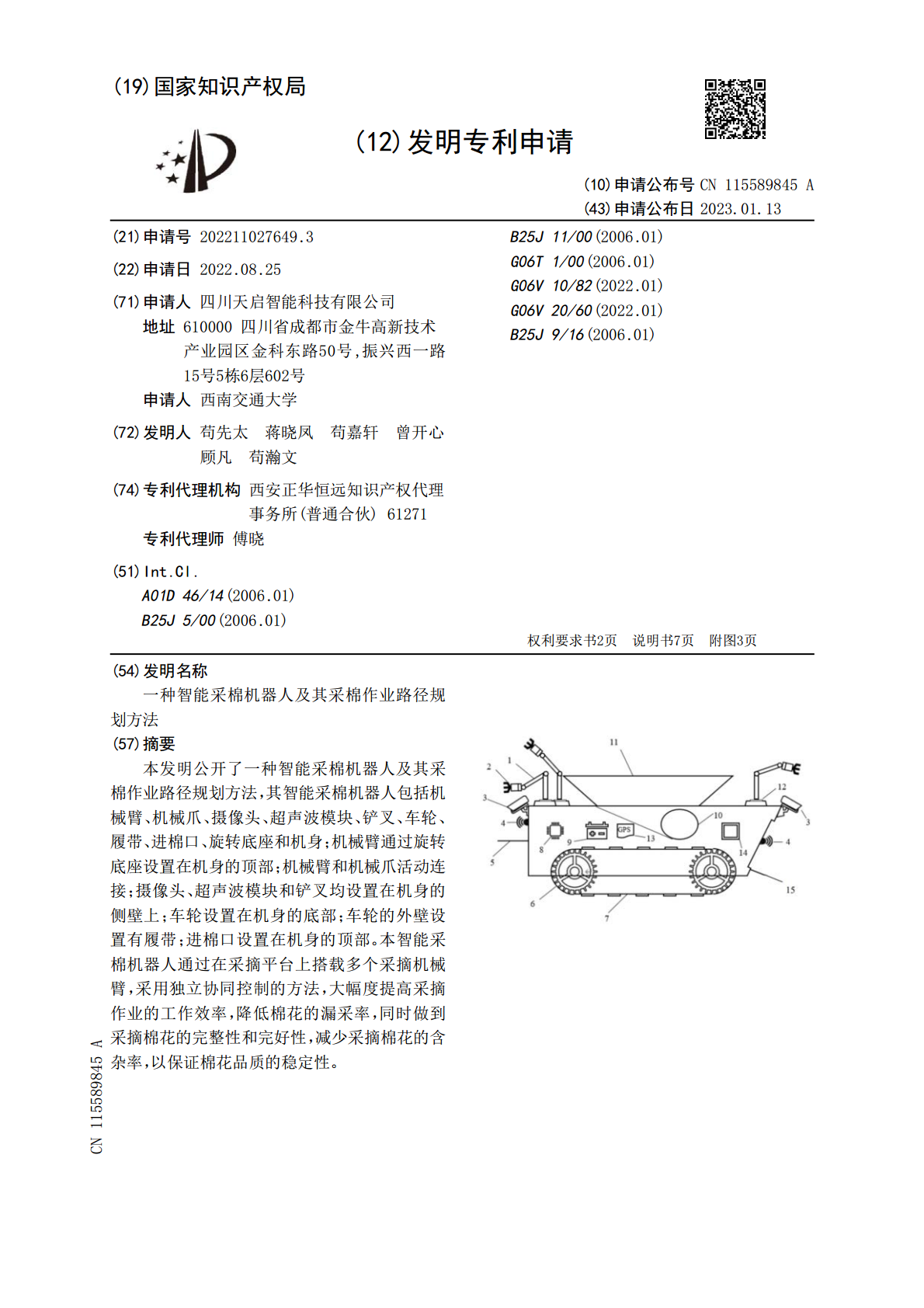
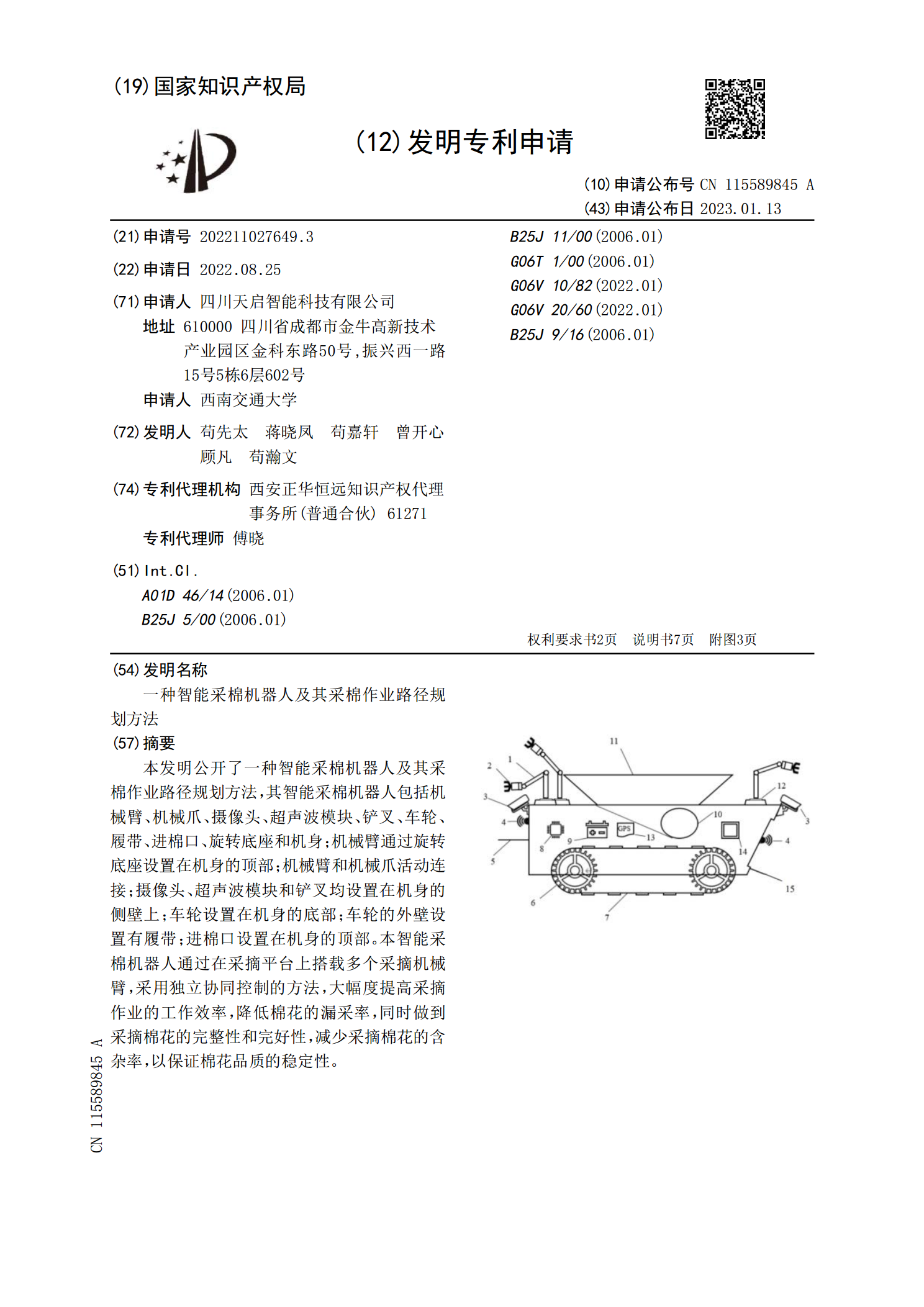
本发明公开了一种智能采棉机器人及其采棉作业路径规划方法,其智能采棉机器人包括机械臂、机械爪、摄像头、超声波模块、铲叉、车轮、履带、进棉口、旋转底座和机身;机械臂通过旋转底座设置在机身的顶部;机械臂和机械爪活动连接;摄像头、超声波模块和铲叉均设置在机身的侧壁上;车轮设置在机身的底部;车轮的外壁设置有履带;进棉口设置在机身的顶部。本智能采棉机器人通过在采摘平台上搭载多个采摘机械臂,采用独立协同控制的方法,大幅度提高采摘作业的工作效率,降低棉花的漏采率,同时做到采摘棉花的完整性和完好性,减少采摘棉花的含杂率,以
一种采棉爪部件及其采棉机.pdf
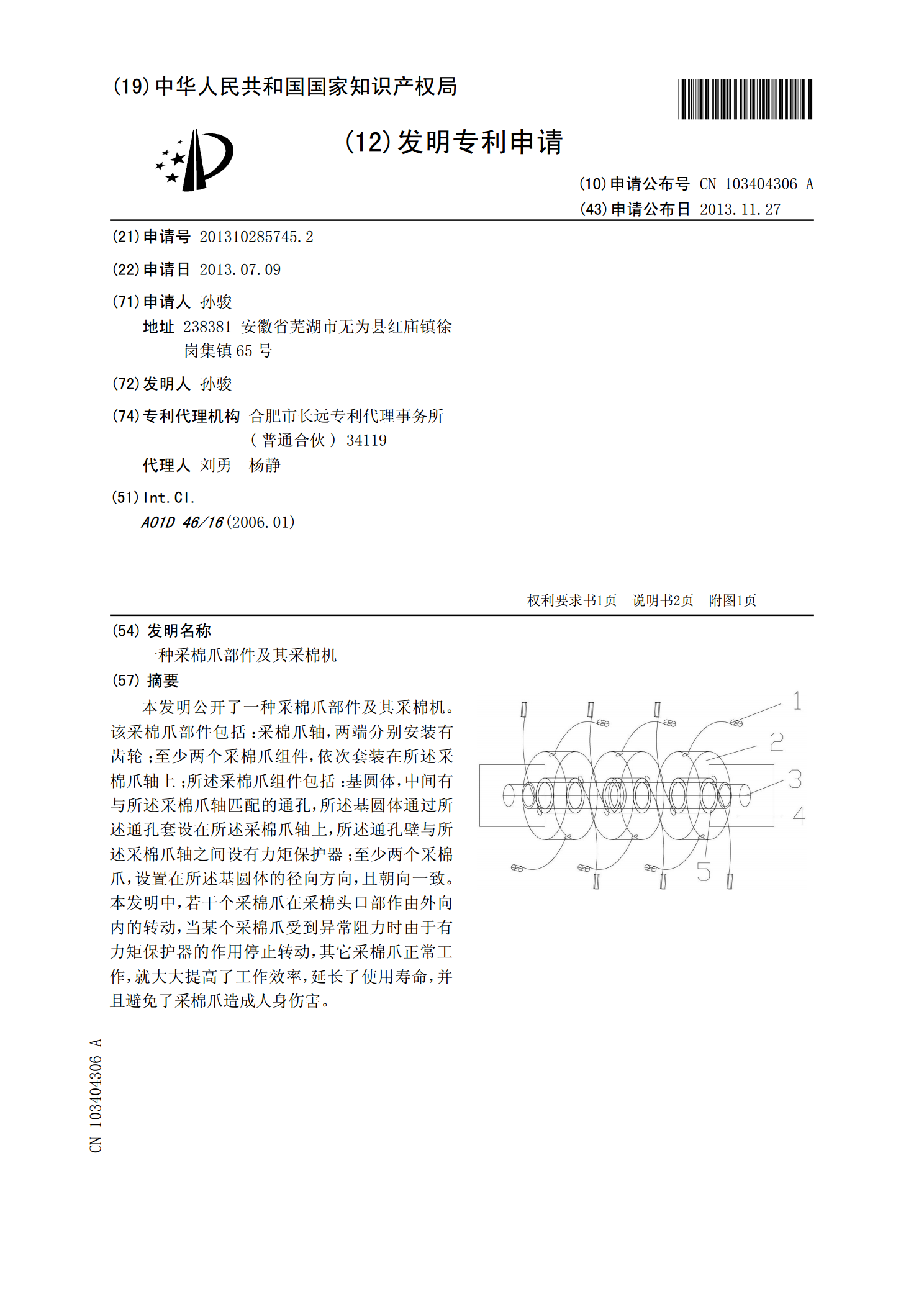
本发明公开了一种采棉爪部件及其采棉机。该采棉爪部件包括:采棉爪轴,两端分别安装有齿轮;至少两个采棉爪组件,依次套装在所述采棉爪轴上;所述采棉爪组件包括:基圆体,中间有与所述采棉爪轴匹配的通孔,所述基圆体通过所述通孔套设在所述采棉爪轴上,所述通孔壁与所述采棉爪轴之间设有力矩保护器;至少两个采棉爪,设置在所述基圆体的径向方向,且朝向一致。本发明中,若干个采棉爪在采棉头口部作由外向内的转动,当某个采棉爪受到异常阻力时由于有力矩保护器的作用停止转动,其它采棉爪正常工作,就大大提高了工作效率,延长了使用寿命,并且避

上下协同式无人自主精准保质采棉机器人及其采棉方法.pdf
本发明提供了一种上下协同式无人自主精保质采棉机器人及其采棉方法,主要由车架、图像识别模块、扶禾机构、棉花扶正机构、棉仓、多轴采棉机构组成。步骤如下:两侧的扶禾机构将棉花苗绽开的棉花枝叶向中间收拢;图像识别模块拍照计算后获取上层棉花的位置;弧形轨道在侧臂轨道上滑动至棉花位置处,扶正梳齿沿内弧轨道滑动以调整棉花的姿态;图像识别模块继续拍照并获取调整姿态后的棉花位置,并对不同质量的棉花进行分类;采棉抓手在三轴轨道上进行空间的移动并抓取棉花,随后将抓取的棉花投放至棉仓内。本发明先对棉花进行姿态进行调整然后采摘,提
一种联动式采棉机机头及其采棉机.pdf
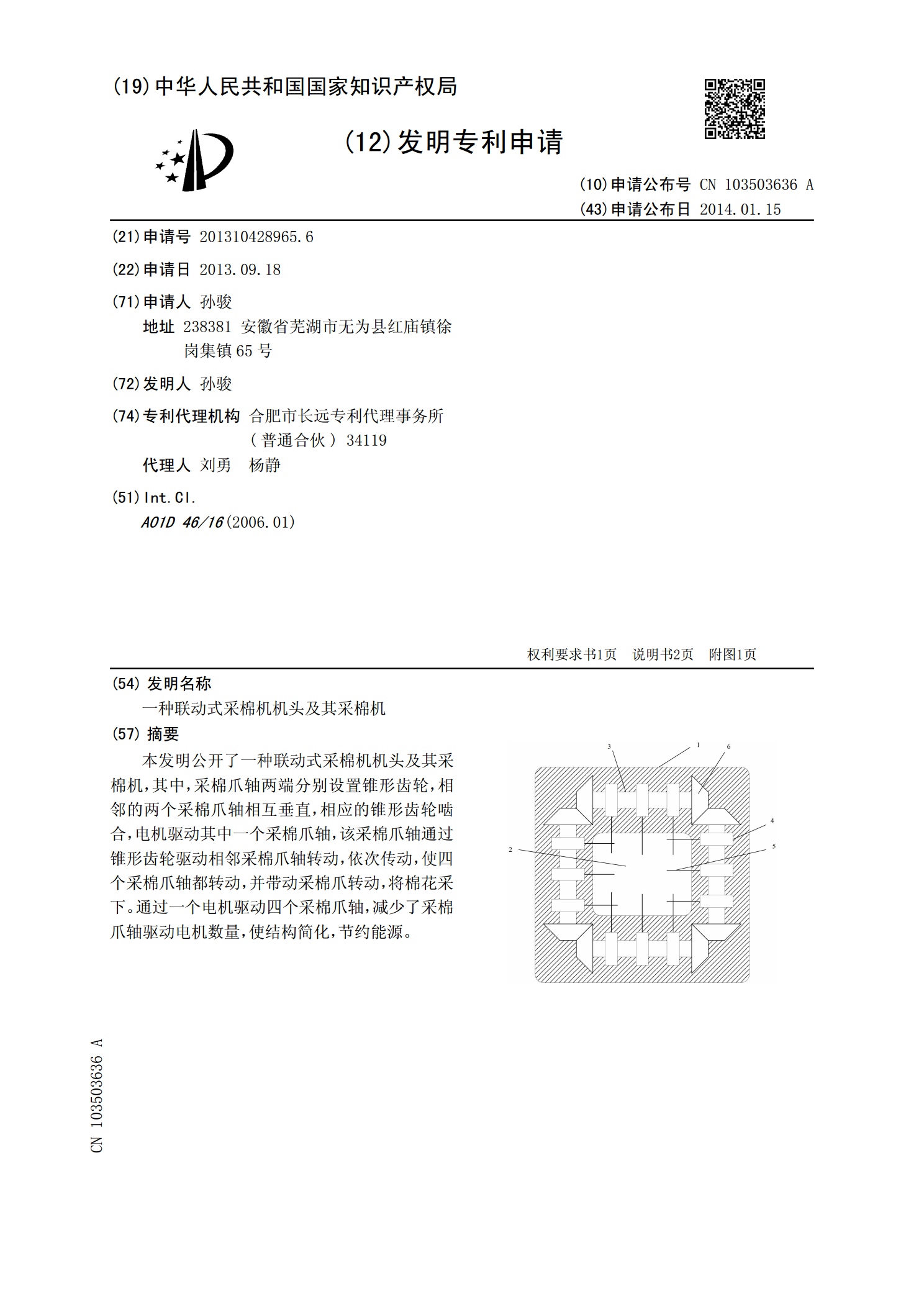
本发明公开了一种联动式采棉机机头及其采棉机,其中,采棉爪轴两端分别设置锥形齿轮,相邻的两个采棉爪轴相互垂直,相应的锥形齿轮啮合,电机驱动其中一个采棉爪轴,该采棉爪轴通过锥形齿轮驱动相邻采棉爪轴转动,依次传动,使四个采棉爪轴都转动,并带动采棉爪转动,将棉花采下。通过一个电机驱动四个采棉爪轴,减少了采棉爪轴驱动电机数量,使结构简化,节约能源。

一种采棉机器人的设想.ppt
一种采棉机器人的设想一、摘棉花需要考虑的问题二、机械化采棉的优点三、目前最常见的采棉机四、采棉机器人的设想1、棉梗高低不一,棉套散乱,且高低不一2、人工摘棉费时费力,而且手指很容易被棉桃扎破,伤口长时间不处理还会造成伤口感染3、人工采摘不仔细,所采摘的棉花中会带有许多碎棉叶,严重影响了后期的处理1、机械化能提高采摘效率2、机械化程度的提高,也大大减少了劳动力的投入,减少长期人工成本的投入3、机械化不存在采摘状态不稳定情况,即不因采摘时间而改变4、机械化采摘也是步入现代化必不可少的过程3.1、国外采棉机全世