
一种面向无人机集群智能协同系统的优化方法.pdf

一条****然后


1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种面向无人机集群智能协同系统的优化方法.pdf
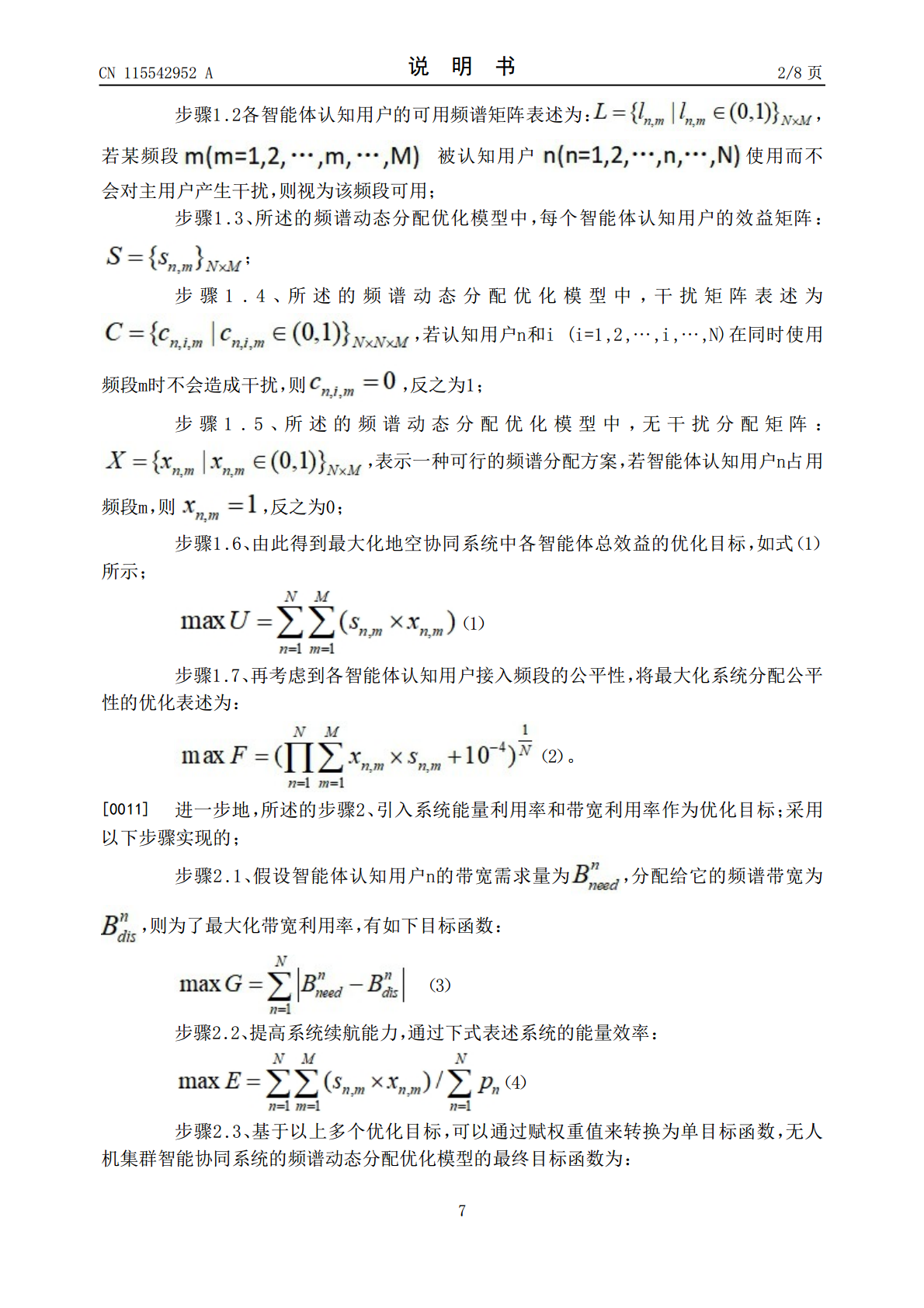
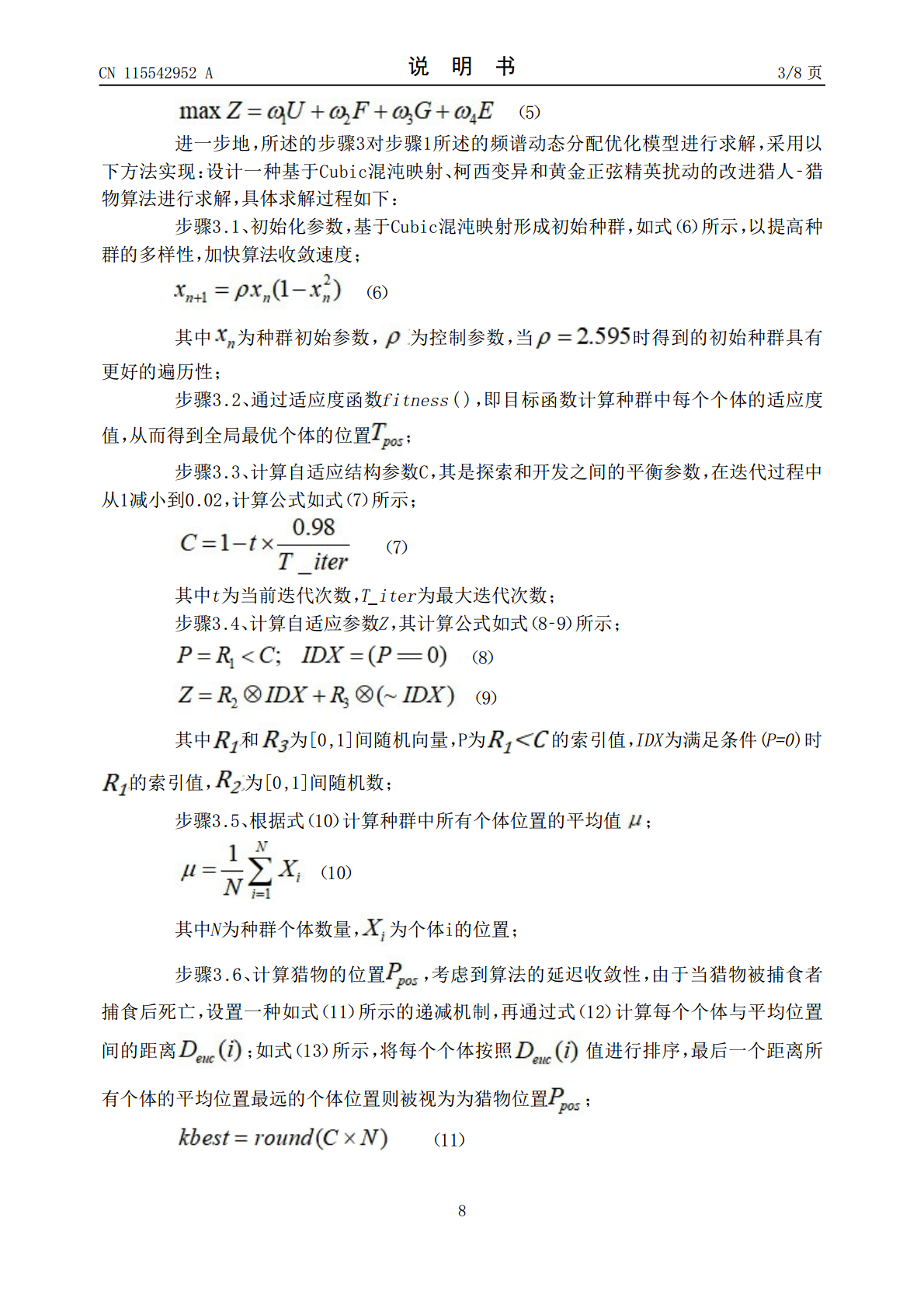
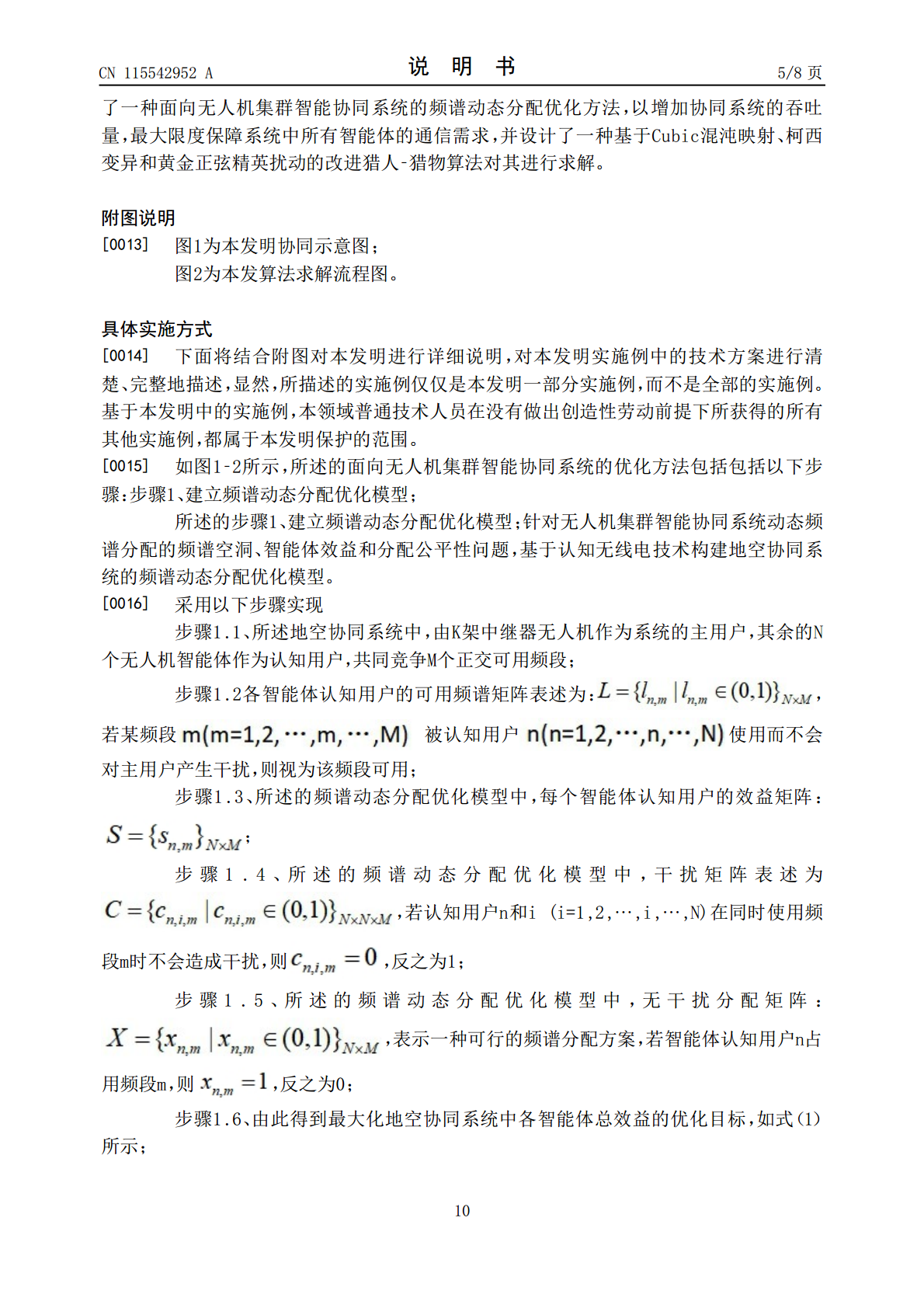
本发明公开了一种面向无人机集群智能协同系统的优化方法,属于无人机控制领域,所述的面向无人机集群智能协同系统的优化方法包括包括以下步骤:步骤1、建立频谱动态分配优化模型;步骤2、引入系统能量利用率和带宽利用率作为优化目标;步骤3、对步骤1所述的频谱动态分配优化模型进行求解;本发明为确保集群协同系统的可靠性、优化系统性能、提升频谱利用率,本文提出了一种面向无人机集群智能协同系统的频谱动态分配优化方法,以增加协同系统的吞吐量,最大限度保障系统中所有智能体的通信需求。
一种无人集群系统协同任务区域覆盖智能优化方法.pdf
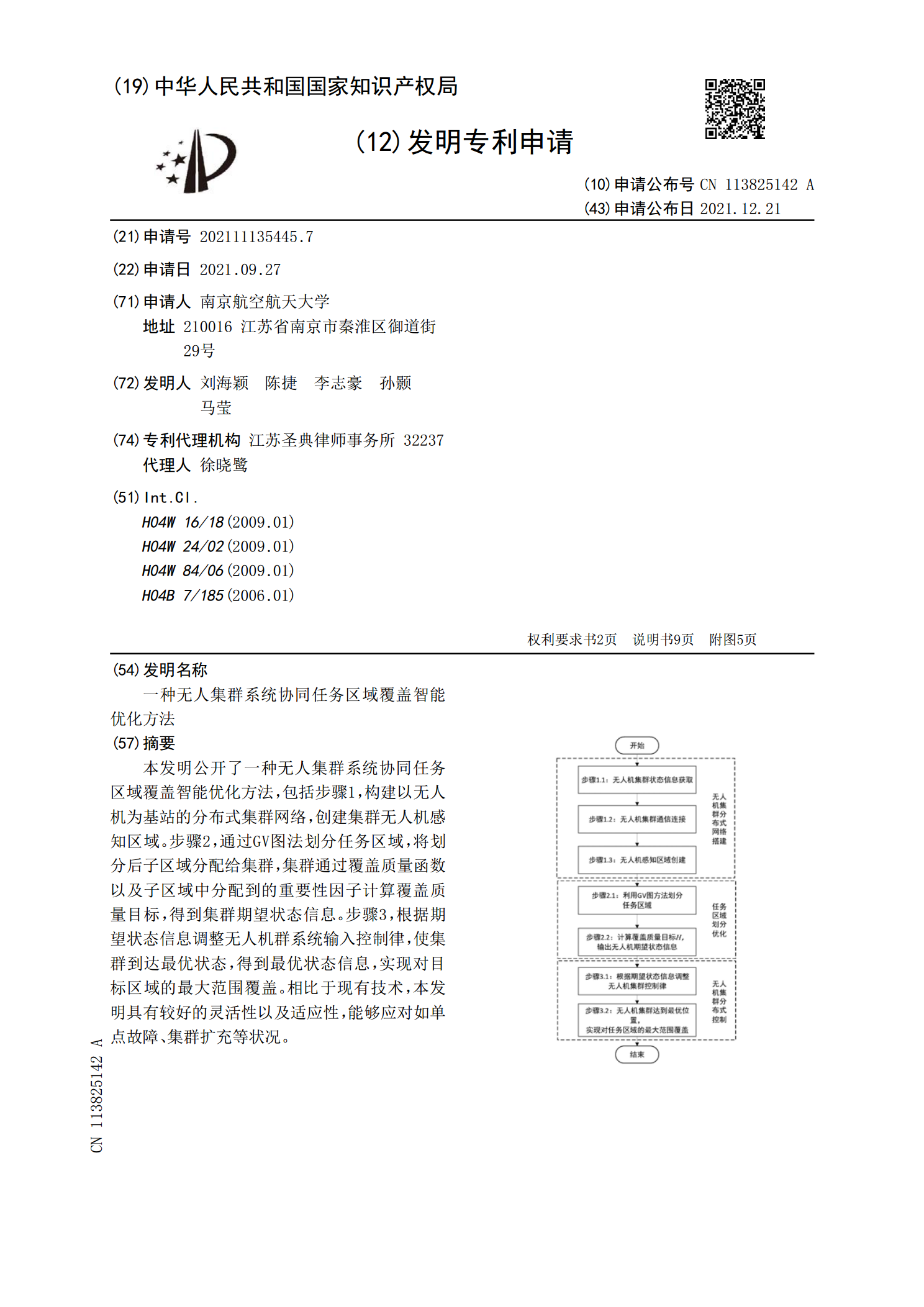
本发明公开了一种无人集群系统协同任务区域覆盖智能优化方法,包括步骤1,构建以无人机为基站的分布式集群网络,创建集群无人机感知区域。步骤2,通过GV图法划分任务区域,将划分后子区域分配给集群,集群通过覆盖质量函数以及子区域中分配到的重要性因子计算覆盖质量目标,得到集群期望状态信息。步骤3,根据期望状态信息调整无人机群系统输入控制律,使集群到达最优状态,得到最优状态信息,实现对目标区域的最大范围覆盖。相比于现有技术,本发明具有较好的灵活性以及适应性,能够应对如单点故障、集群扩充等状况。

面向无人机集群的弹性协同推理架构及方法.pdf
本发明公开了一种面向无人机集群的弹性协同推理架构及方法,本发明能够根据各节点的状态动态更新调度策略,并且能够应对部分节点失效的情况。另外,本发明可以通过协同推理的方式在无人机搭载的有限性能嵌入式设备上处理更大规模的复杂模型,提高智能应用的精度,同时也能在部分节点连接不可达和恢复连接时自适应地更新分配策略,通过弹性协同提高了无人机集群的抗毁性。

一种面向异构任务的无人机集群协同目标选择方法.pdf
本发明公开了一种面向异构任务的无人机集群协同目标选择方法,通过考虑不同目标的任务价值和要求,以及多机协同增益和制约关系,构建了斯坦伯格博弈模型,将上层无人机建立为博弈领导者,下层无人机建立为博弈跟随者,并提出了一种分布式策略更新迭代算法,有效提升无人机集群系统同时完成多个任务的效率,并能在不同环境下实现面向异构任务价值的高效协同,本发明使得无人机能根据区域内目标任务的需求和价值属性,通过集群内部协同和算法迭代,合理分配每架无人机的任务对象,提高无人机集群的整体任务能力,解决当前无人机集群系统任务分配局限于
一种智能体集群协同运动方法及系统.pdf
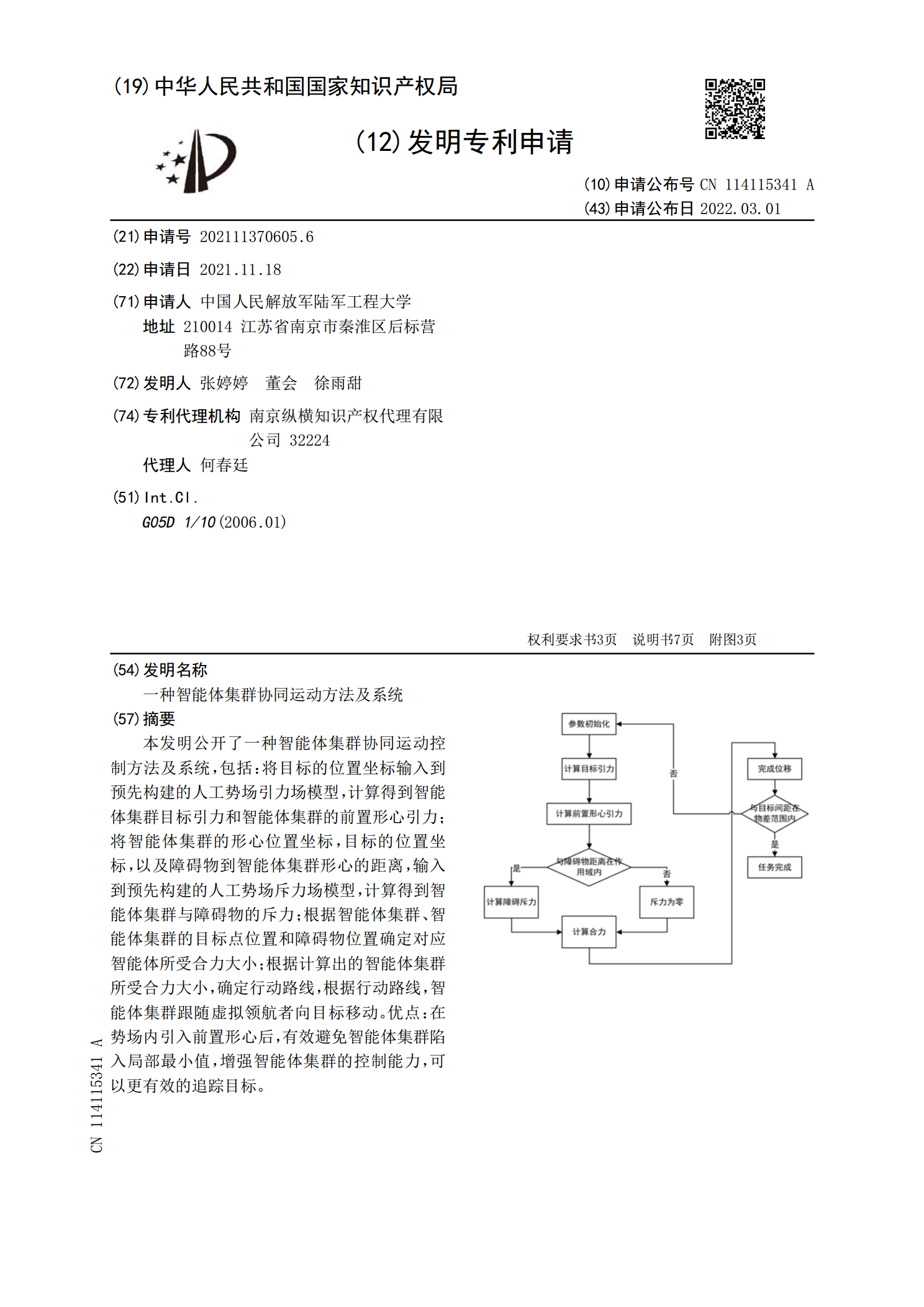
本发明公开了一种智能体集群协同运动控制方法及系统,包括:将目标的位置坐标输入到预先构建的人工势场引力场模型,计算得到智能体集群目标引力和智能体集群的前置形心引力;将智能体集群的形心位置坐标,目标的位置坐标,以及障碍物到智能体集群形心的距离,输入到预先构建的人工势场斥力场模型,计算得到智能体集群与障碍物的斥力;根据智能体集群、智能体集群的目标点位置和障碍物位置确定对应智能体所受合力大小;根据计算出的智能体集群所受合力大小,确定行动路线,根据行动路线,智能体集群跟随虚拟领航者向目标移动。优点:在势场内引入前置