
港口门座式起重机工作原理.doc

和蔼****娘子


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

港口门座式起重机工作原理.doc
(完整word版)港口门座式起重机工作原理(完整word版)港口门座式起重机工作原理(完整word版)港口门座式起重机工作原理港口门座式起重机动态抓斗电子秤的工作原理一、吊臂结构为了适应不同吨位的大、中、小型货轮物料的装卸作业,门座式起重机的吊臂结构设计为在长度方向上是可以伸缩的,即大型货轮的中心位离码头的距离比小型货轮的中心位要大得多,所以吊臂要在长度方向伸展,方能使吊钩或抓斗落到大轮的中心位上,相应的吊臂34与35之间的夹角∠a也随着吊臂的伸展而增大(如图1所示)吊臂33
大型门式和港口门座式起重机的防风装置.pdf
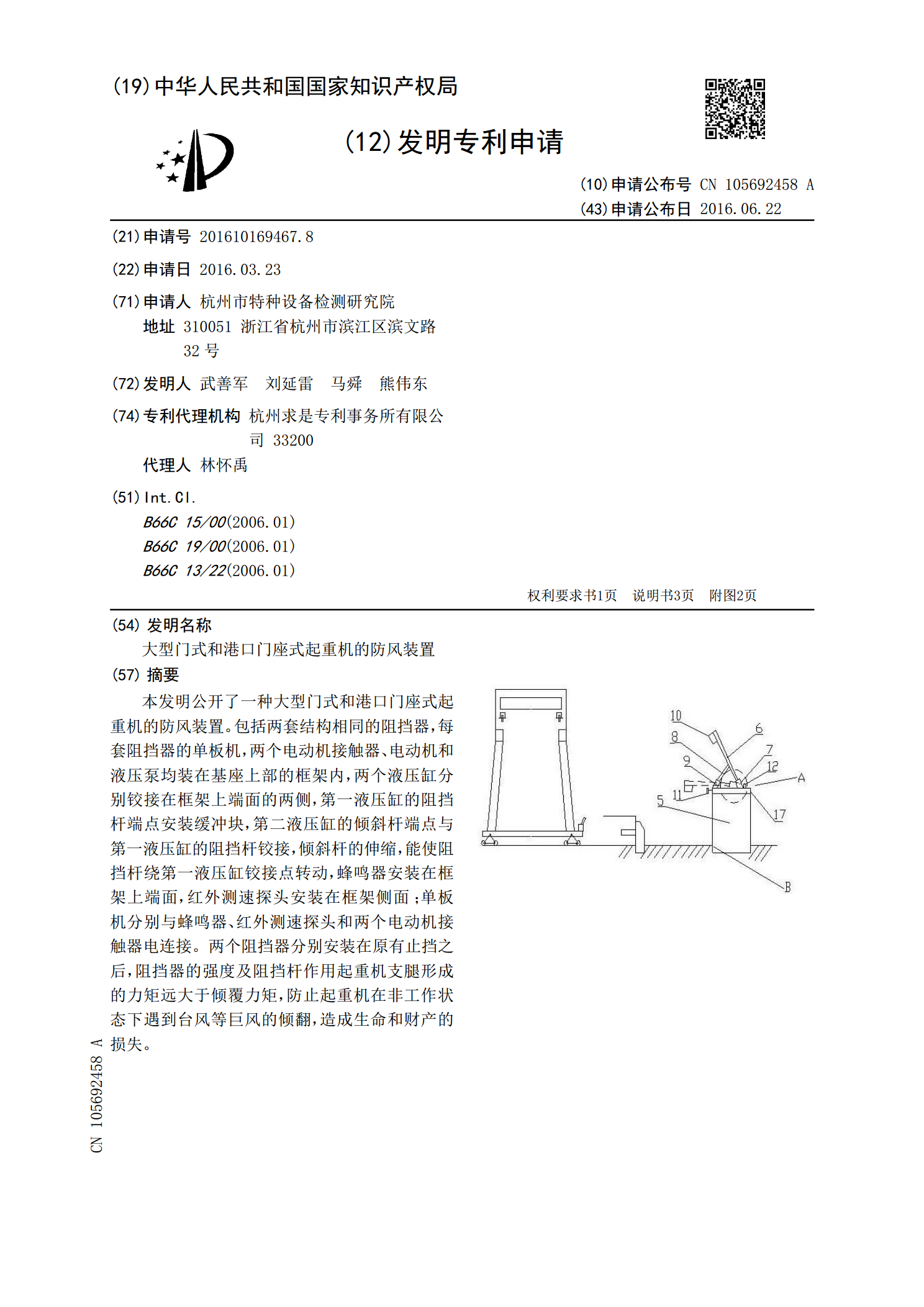
本发明公开了一种大型门式和港口门座式起重机的防风装置。包括两套结构相同的阻挡器,每套阻挡器的单板机,两个电动机接触器、电动机和液压泵均装在基座上部的框架内,两个液压缸分别铰接在框架上端面的两侧,第一液压缸的阻挡杆端点安装缓冲块,第二液压缸的倾斜杆端点与第一液压缸的阻挡杆铰接,倾斜杆的伸缩,能使阻挡杆绕第一液压缸铰接点转动,蜂鸣器安装在框架上端面,红外测速探头安装在框架侧面;单板机分别与蜂鸣器、红外测速探头和两个电动机接触器电连接。两个阻挡器分别安装在原有止挡之后,阻挡器的强度及阻挡杆作用起重机支腿形成的力

港口门座式起重机常见电气故障分析.docx
港口门座式起重机常见电气故障分析一、引言港口门座式起重机是一种广泛应用于港口、码头等场所的重型起重设备,其工作效率和稳定性对于大型货物的运输和卸载至关重要,因此港口门座式起重机在现代物流行业中扮演着非常重要的角色。然而,由于其复杂的机械和电气系统,这些起重机在长时间使用时也会出现一些各种各样的电气故障,严重影响到设备的正常使用和作业效率。因此,对港口门座式起重机常见电气故障的分析和解决方法进行研究和总结,对于提高设备的安全性和可靠性,保证顺畅的生产、作业效率具有很重要的理论和实际意义。二、常见故障原因及分
港口门座式起重机常见电气故障分析.pptx
汇报人:目录PARTONEPARTTWO港口门座式起重机电气系统的组成港口门座式起重机电气系统的工作原理PARTTHREE电源故障控制电路故障电机故障传感器故障电磁阀故障PARTFOUR电源故障的诊断与排除控制电路故障的诊断与排除电机故障的诊断与排除传感器故障的诊断与排除电磁阀故障的诊断与排除PARTFIVE定期检查与维护使用高品质的电气元件建立完善的故障记录和维修档案加强操作人员的培训和管理PARTSIX实际案例描述案例分析过程及解决方法案例总结与经验教训THANKYOU

门座式起重机1.pptx
门座式起重机培训材料一、门机设备概述该门机主要由组合臂架系统、人字架、转盘、以及安装在转盘上面的起升、变幅、旋转机构及机房、电气房、司机室等上部回转部分,和由圆筒式门架、平衡梁、运行台车、抗风防倾装置及其它安全装置等下部非回转部分及一些辅助机构与结构组成。臂架、象鼻梁、平衡梁、大拉杆通过铰轴连接,与人字架、转盘等支承构件组成一个四连杆平面机构的组合臂架系统,通过变幅驱动装置实现不同幅度范围内的作业要求。该门机在工作范围内不仅能实现各机构的独立动作,同时能够实现起升、变幅、旋转的单独或联合动作。4、防风锚定