
段永德-基于MATLAB SIMULINK平面连杆机构运动学仿真(1).rar

秀美****甜v

单瑞峰的毕业设计论文okay.doc
预览
单瑞峰选题审批表.doc
预览
段永德-基于MATLABSIMULINK平面连杆机构运动学仿真-任务书.doc
预览
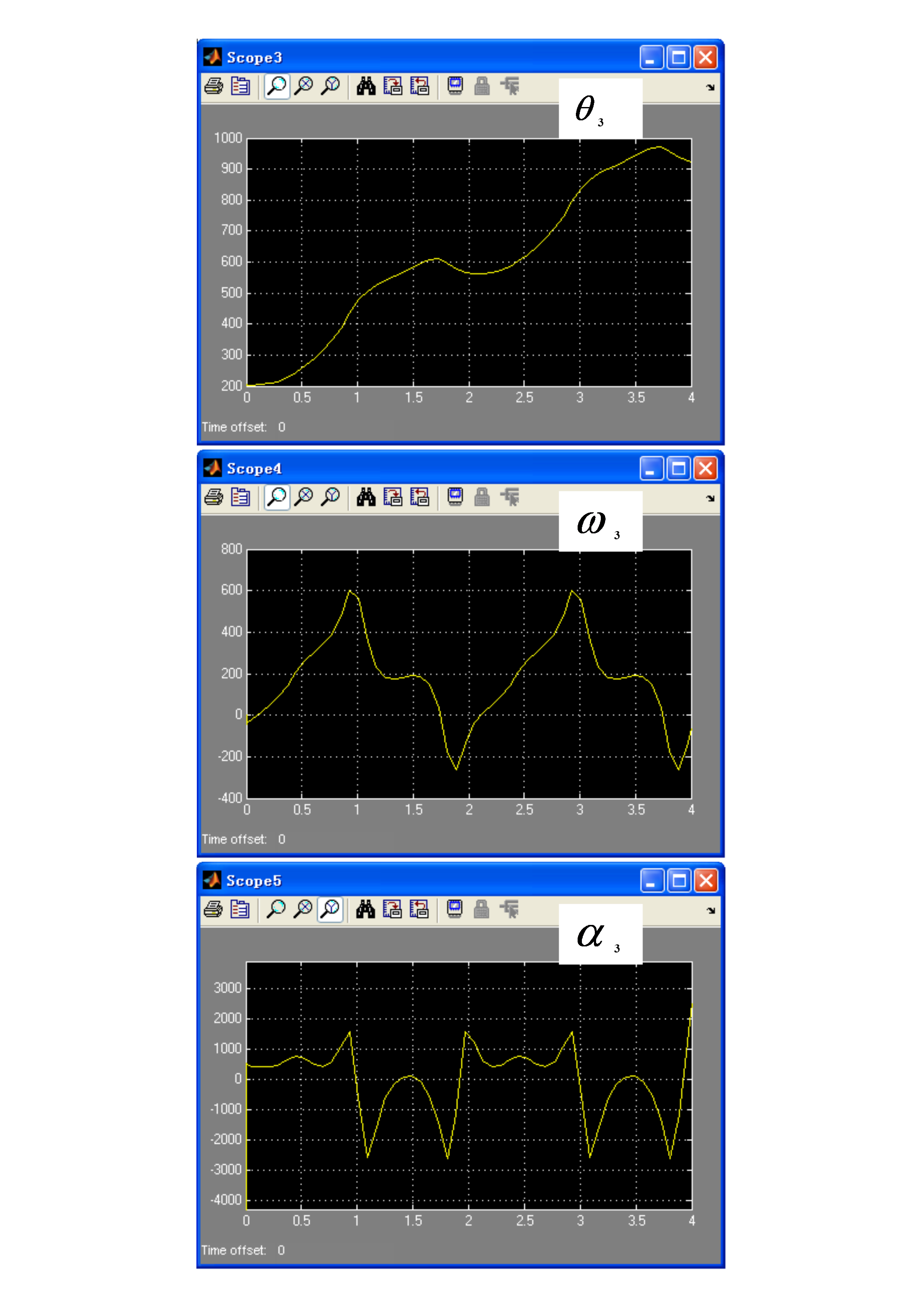
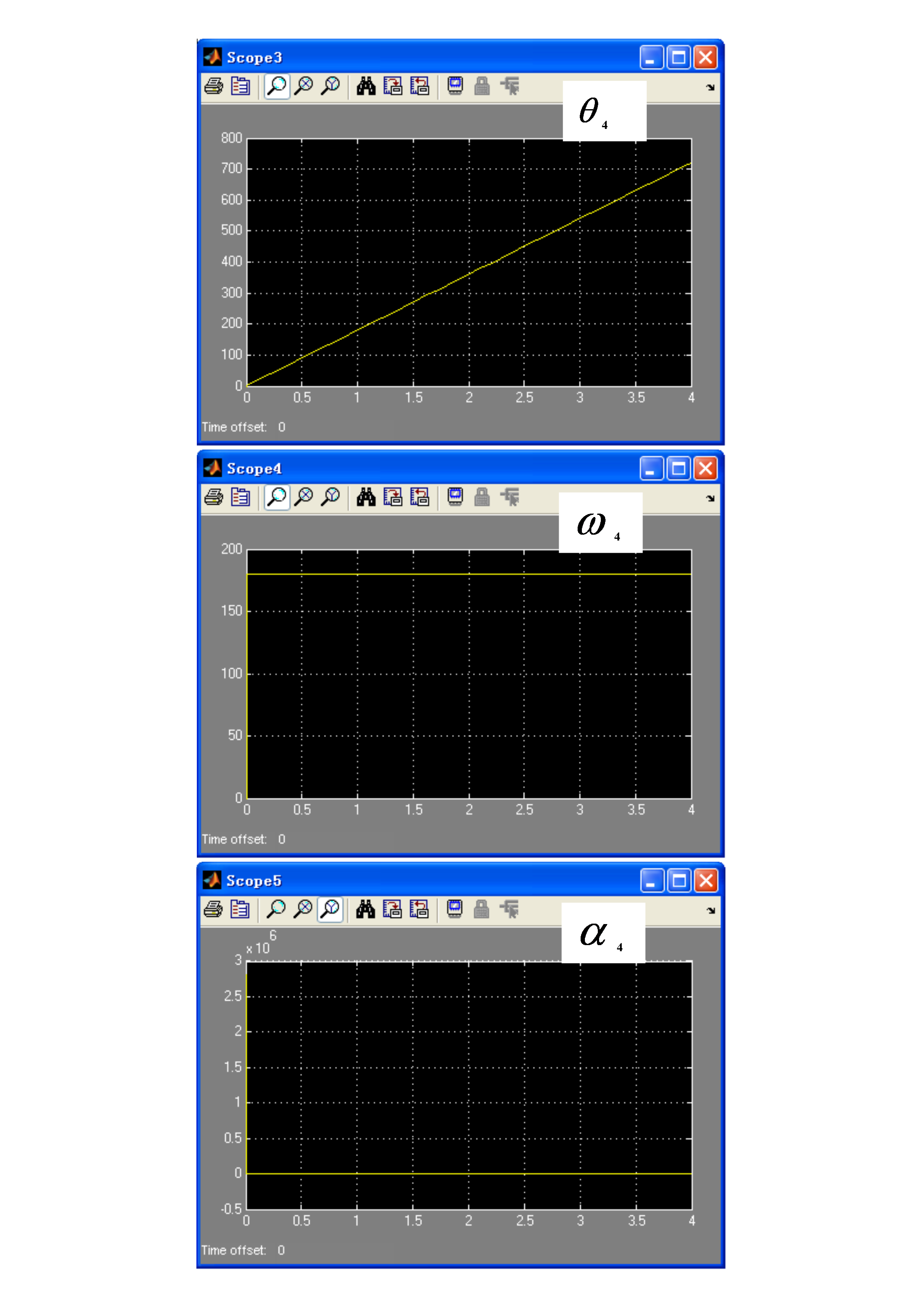
MATLAB输出图片.doc
预览
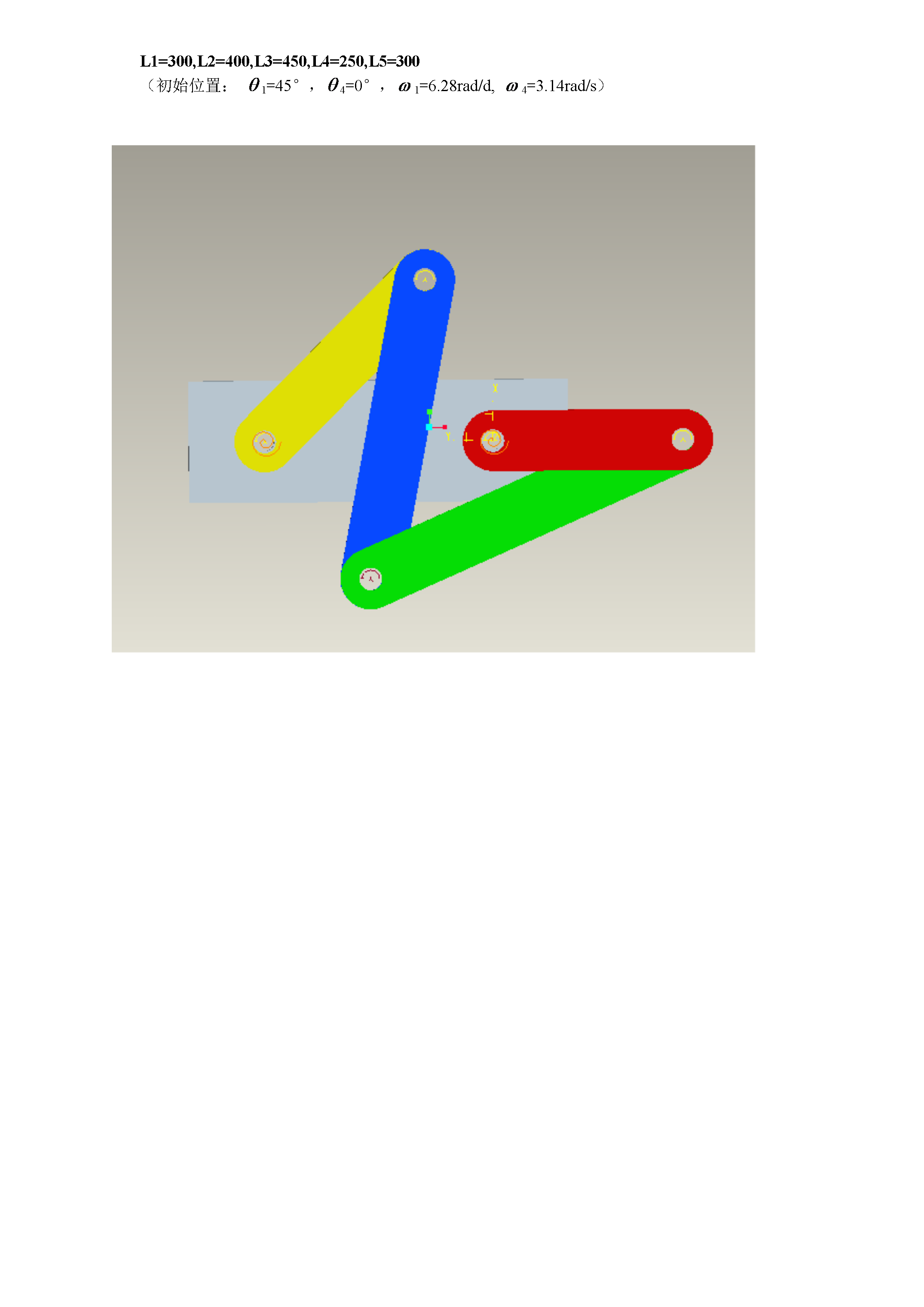
proe输出图片.doc
预览
连杆1234的运动参数输出.xls
预览
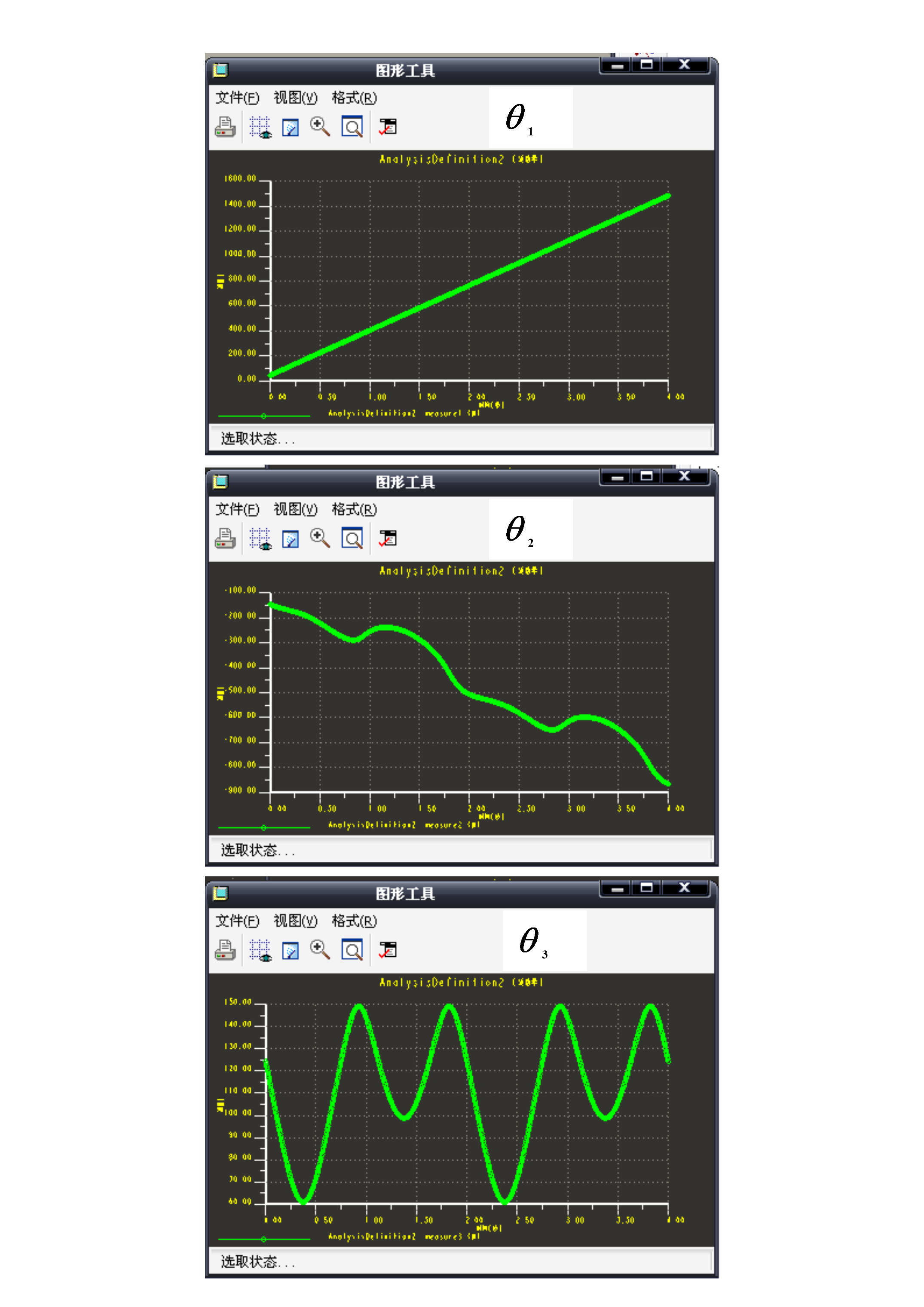
输出图片.doc
预览
连杆123的运动参数输出.xls
预览





在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
段永德-基于MATLAB SIMULINK平面连杆机构运动学仿真(1).rar
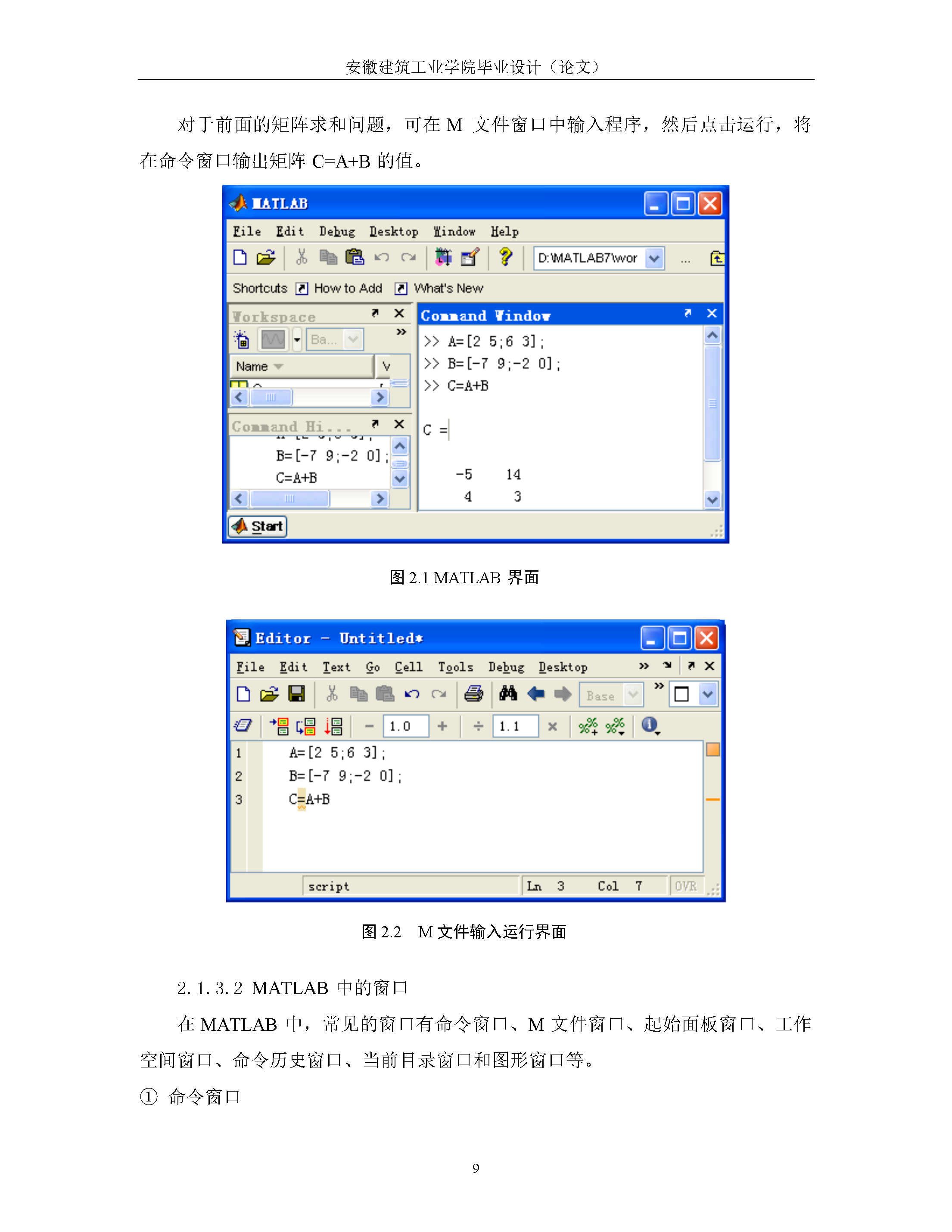
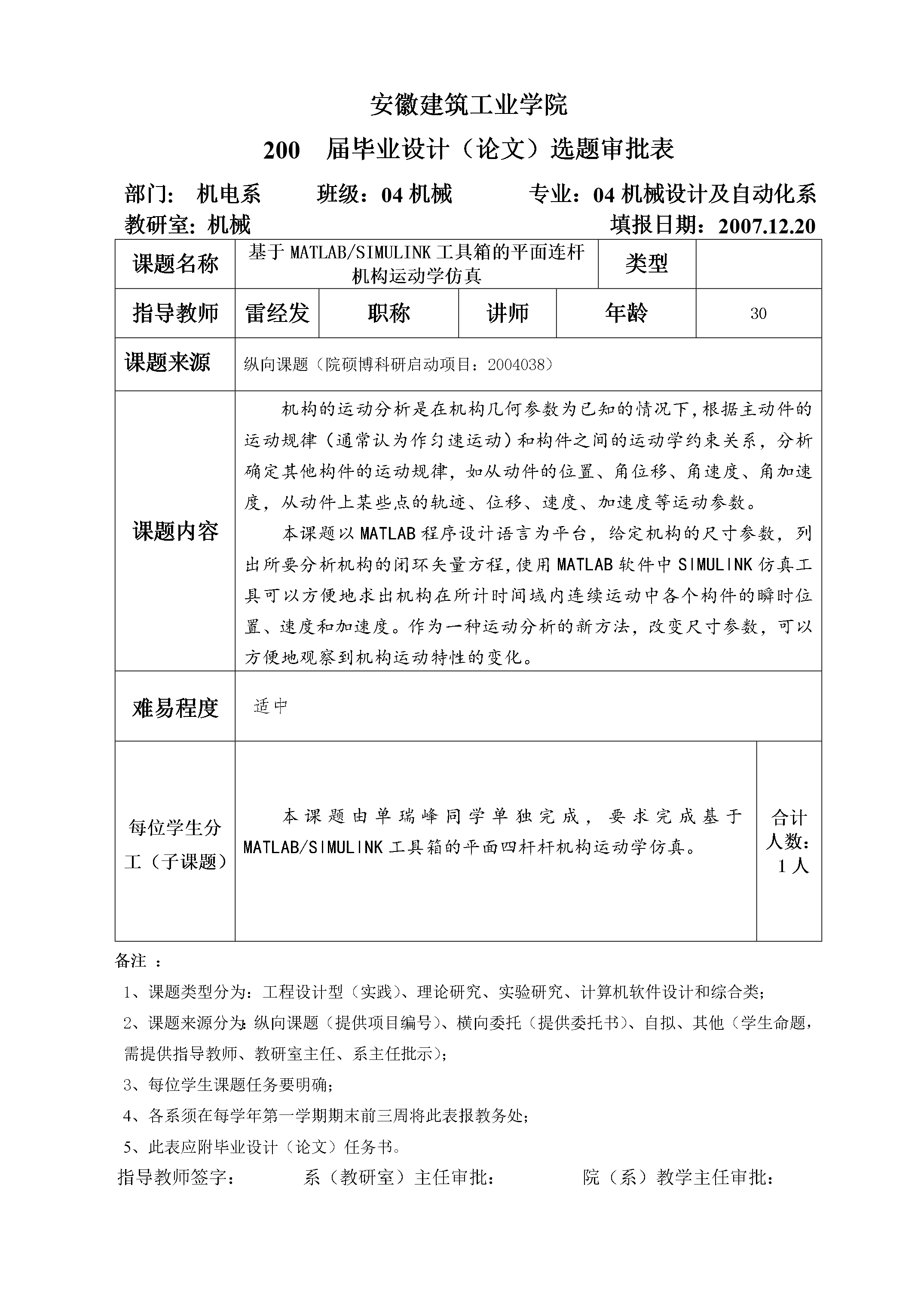
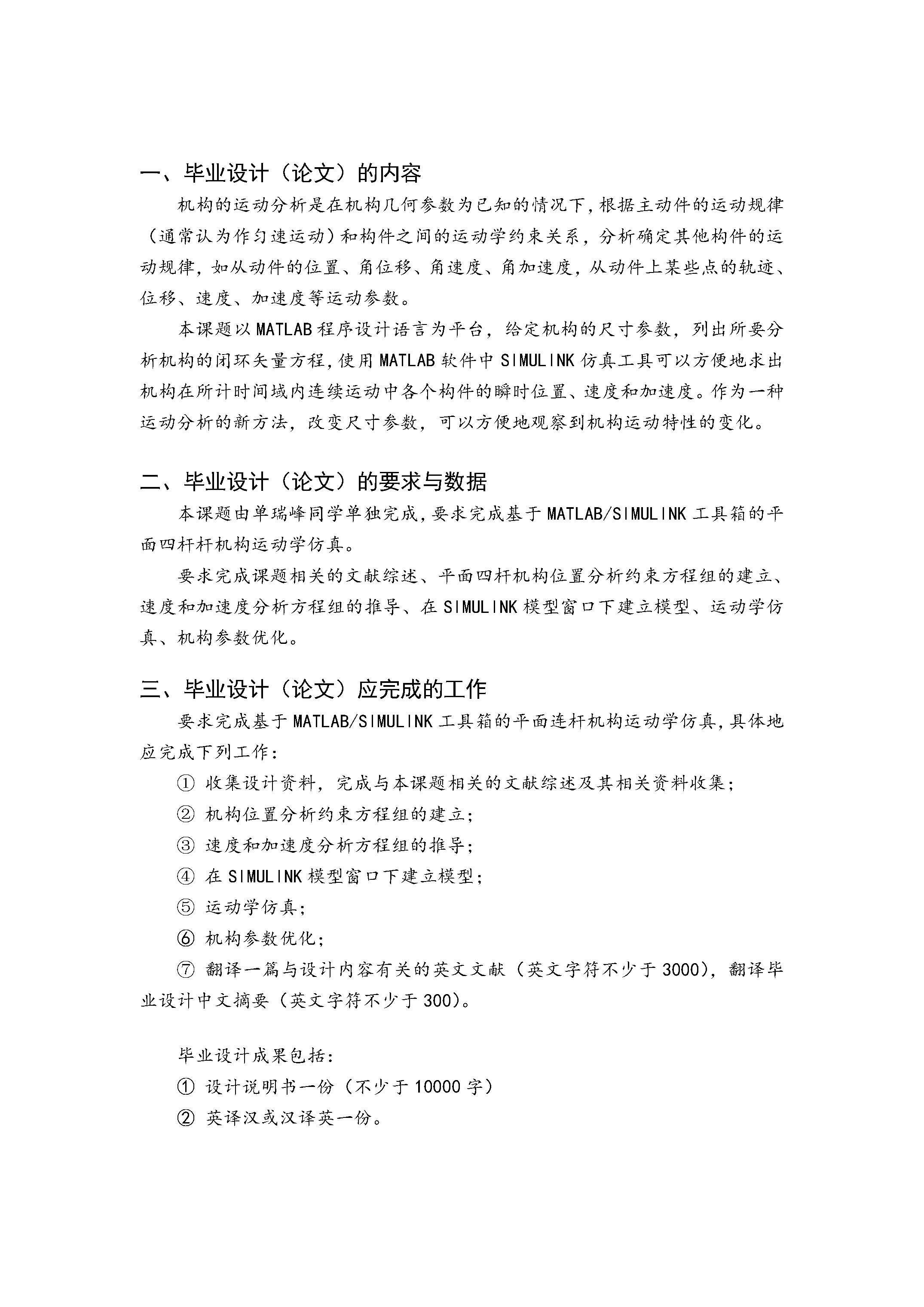
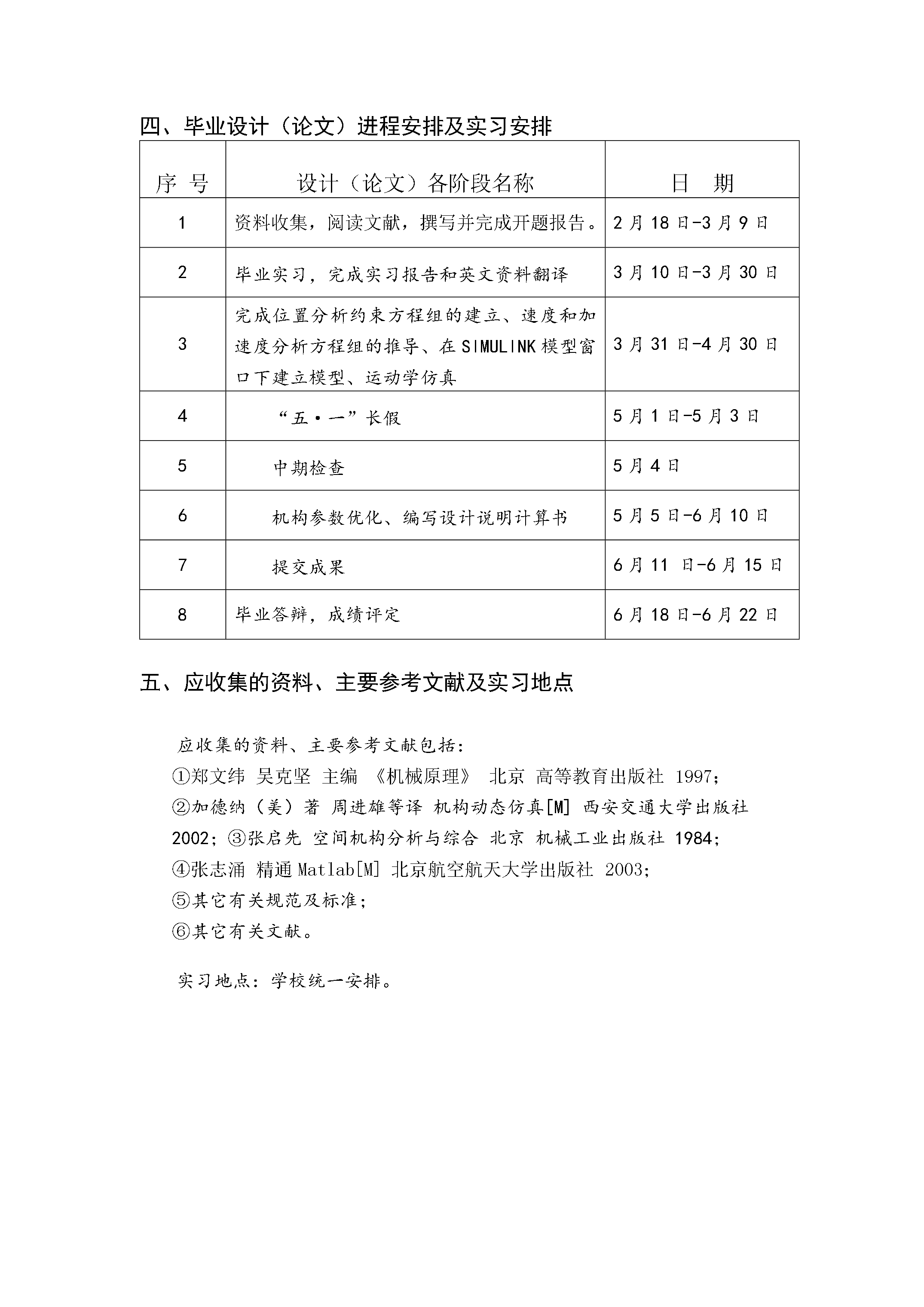
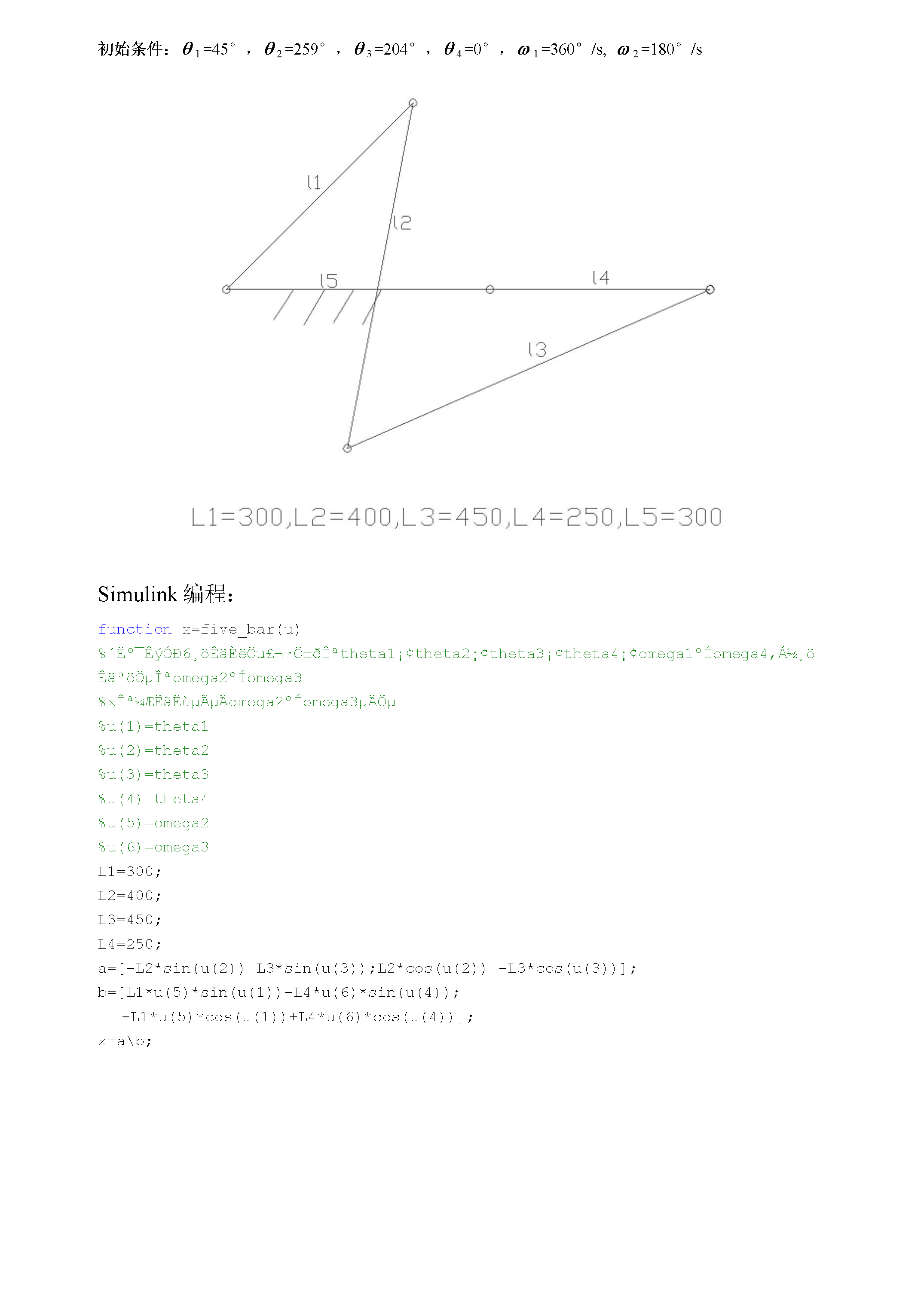
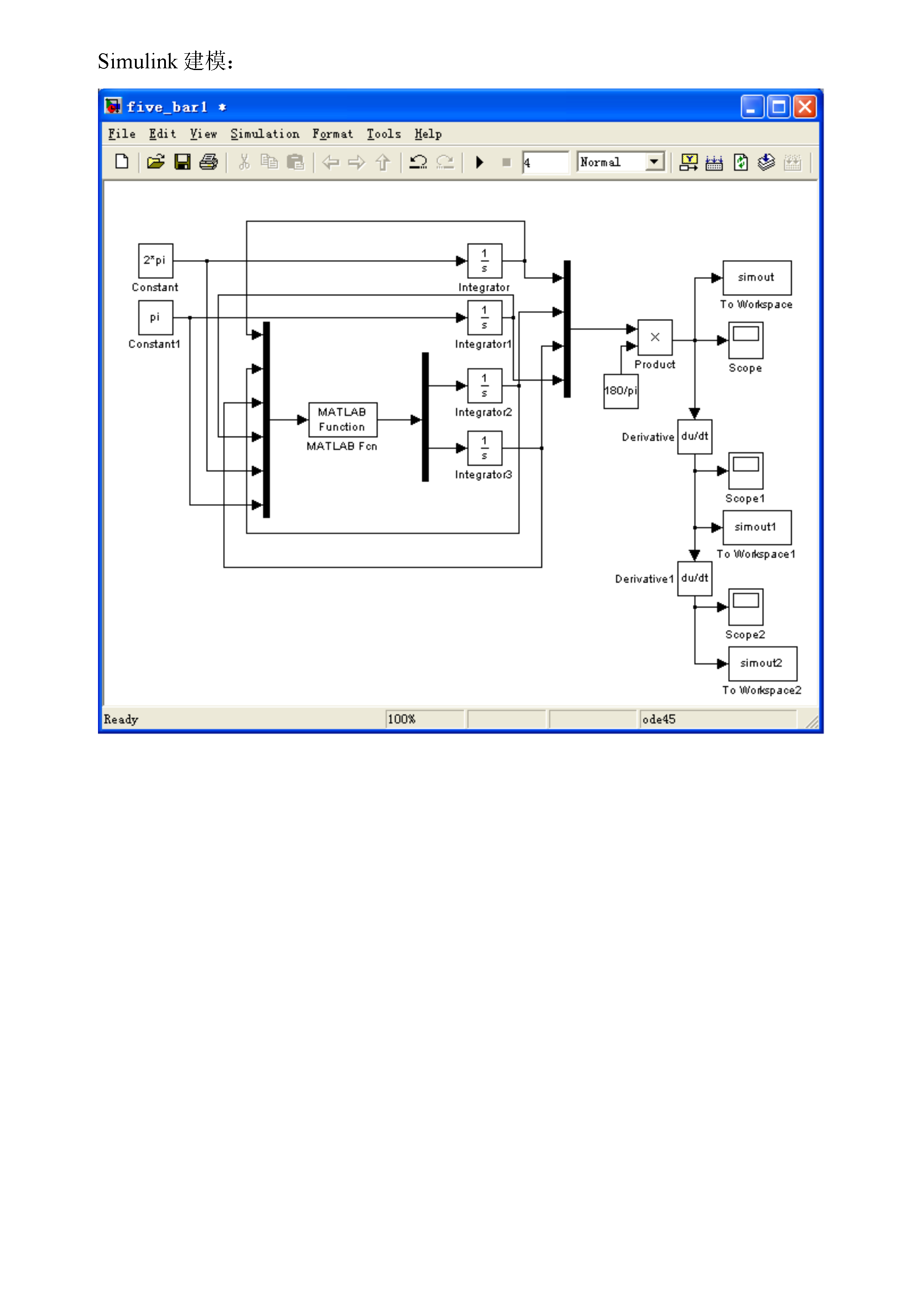
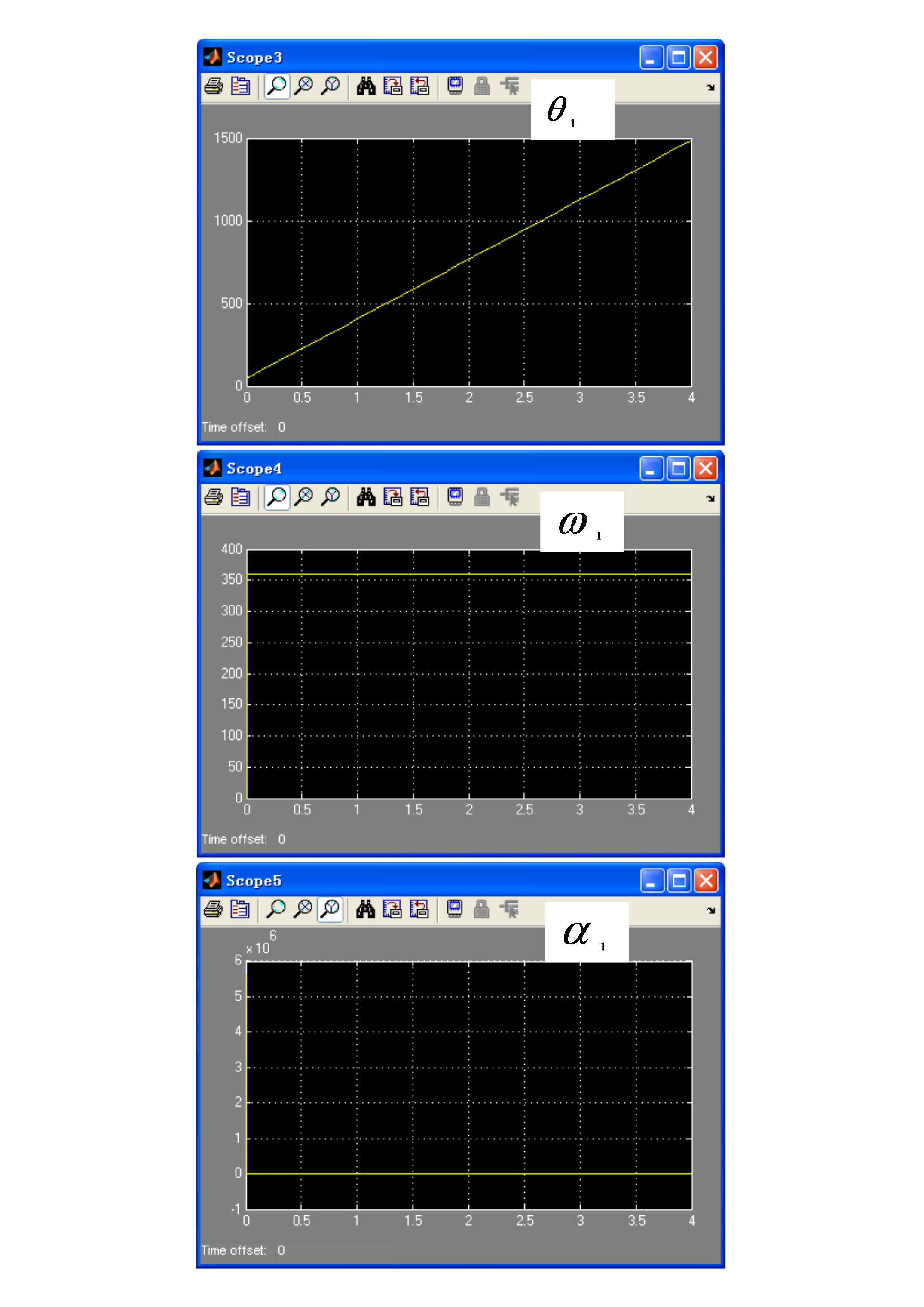
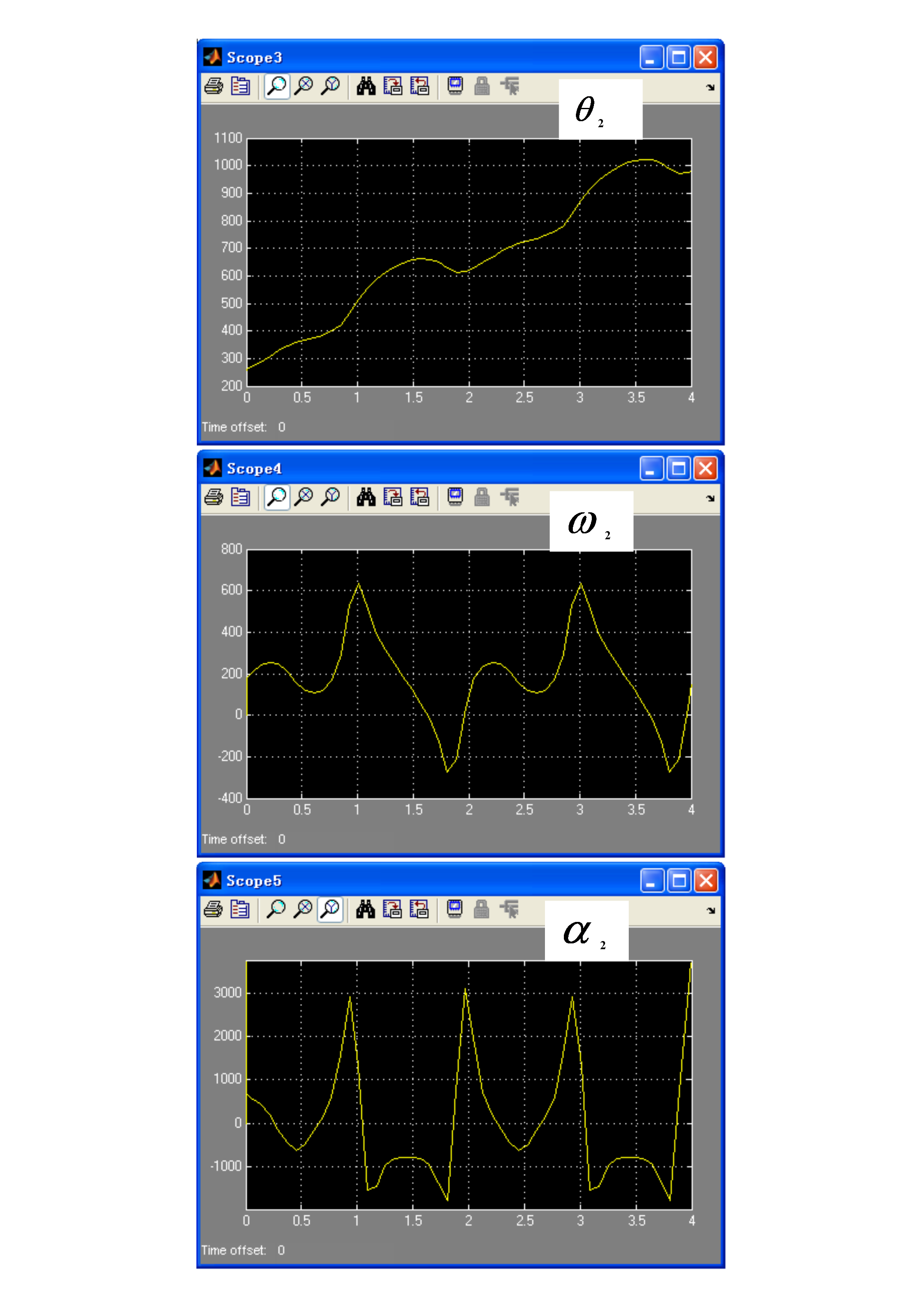
基于MATLAB/SIMULINK工具箱的平面连杆机构运动学仿真安徽建筑工业学院毕业设计(论文)8685毕业设计(论文)专业机械设计制造及其自动化班级04机械②班学生姓名单瑞峰学号04207040209课题基于MATLAB/SIMULINK工具箱的平面连杆机构运动学仿真指导教师雷经发2008年6月6日基于MATLAB/SIMULINK工具箱的平面连杆机构运动学仿真机械与电气工程系机械设计制造及其自动化专业04机械2班单瑞峰指导老师:雷经发摘要:机构的运动分析是在机构几何参数已知的情况下,根据主动件的运动规

基于SIMULINK平面五杆机构运动学仿真.docx
基于SIMULINK平面五杆机构运动学仿真五杆机构是一种用于转换旋转运动为直线运动或者直线运动为旋转运动的机械结构,广泛应用于机械制造和自动化控制领域。其中平面五杆机构是一种常见的五杆机构,它由五个杆件组成,并且所有杆件都在同一平面上移动。本文将基于SIMULINK平面五杆机构运动学仿真,对平面五杆机构的运动学特性进行分析和探讨。1.平面五杆机构的运动学特性平面五杆机构是由固定杆件、驱动杆件和被动杆件组成的。其中固定杆件是机构的支撑系统,驱动杆件通过动力学力来驱动整个机构的运动,被动杆件通过机构的连杆使得

基于MATLAB的平面四连杆机构运动学分析.docx
一、课程设计内容及要求:1.对连杆机构运动工作原理及运动参数有一定理解2.掌握MATLAB基本命令3.了解MATLAB编程的基本知识,并能编写简单M文件4.了解MATLAB图形界面设计的基本知识5.课程设计说明书:应阐述整个课程设计内容,要突出重点和特色,图文并茂,文字通畅。应有目录、摘要及关键词、正文、参考文献等内容,字数一般不少于6000字。二、主要参考资料有关复杂刀具参数计算及结构设计、机械制造工艺与设备的手册与图册。三、课程设计进度安排阶段阶段内容起止时间1布置任务,准备资料1天(12月12日)2

基于matlab和simulink的系统仿真.doc
基于matlab/simulink的QPSK通信系统仿真课程设计目的:本课程设计主要是学会运用MATLAB中的Simulink来实现数字基带信号的模拟传输。在知道其传输原理的情况下,将仿真电路到Simulink之中。并且对正交振幅调制、解调过程的频谱和波形的分析,同时在无噪声和有噪声的进行分析,加入高斯白噪声,瑞利噪声,莱斯噪声分析调制解调后的频谱、波形,观察其误码率。(1)巩固和加深学生对QPSK调制解调技术的基本知识的理解和掌握;(2)掌握编程和程序调试的基本技能;(3)利用MATLAB进行基本的软件

基于matlab和simulink的系统仿真.docx
基于matlab/simulink的QPSK通信系统仿真课程设计目的:本课程设计主要是学会运用MATLAB中的Simulink来实现数字基带信号的模拟传输。在知道其传输原理的情况下,将仿真电路到Simulink之中。并且对正交振幅调制、解调过程的频谱和波形的分析,同时在无噪声和有噪声的进行分析,加入高斯白噪声,瑞利噪声,莱斯噪声分析调制解调后的频谱、波形,观察其误码率。(1)巩固和加深学生对QPSK调制解调技术的基本知识的理解和掌握;(2)掌握编程和程序调试的基本技能;(3)利用MATLAB进行基本的软件