
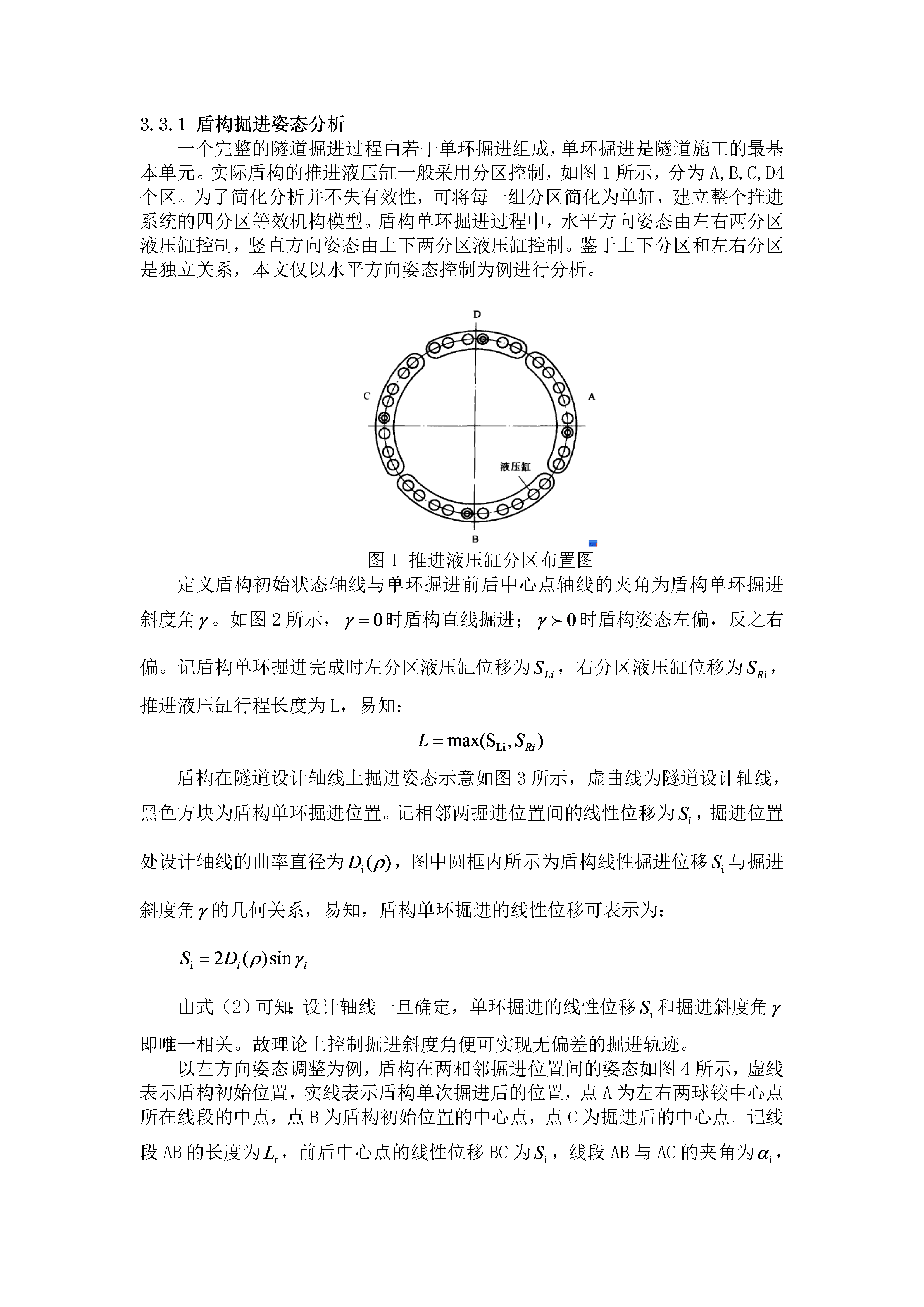
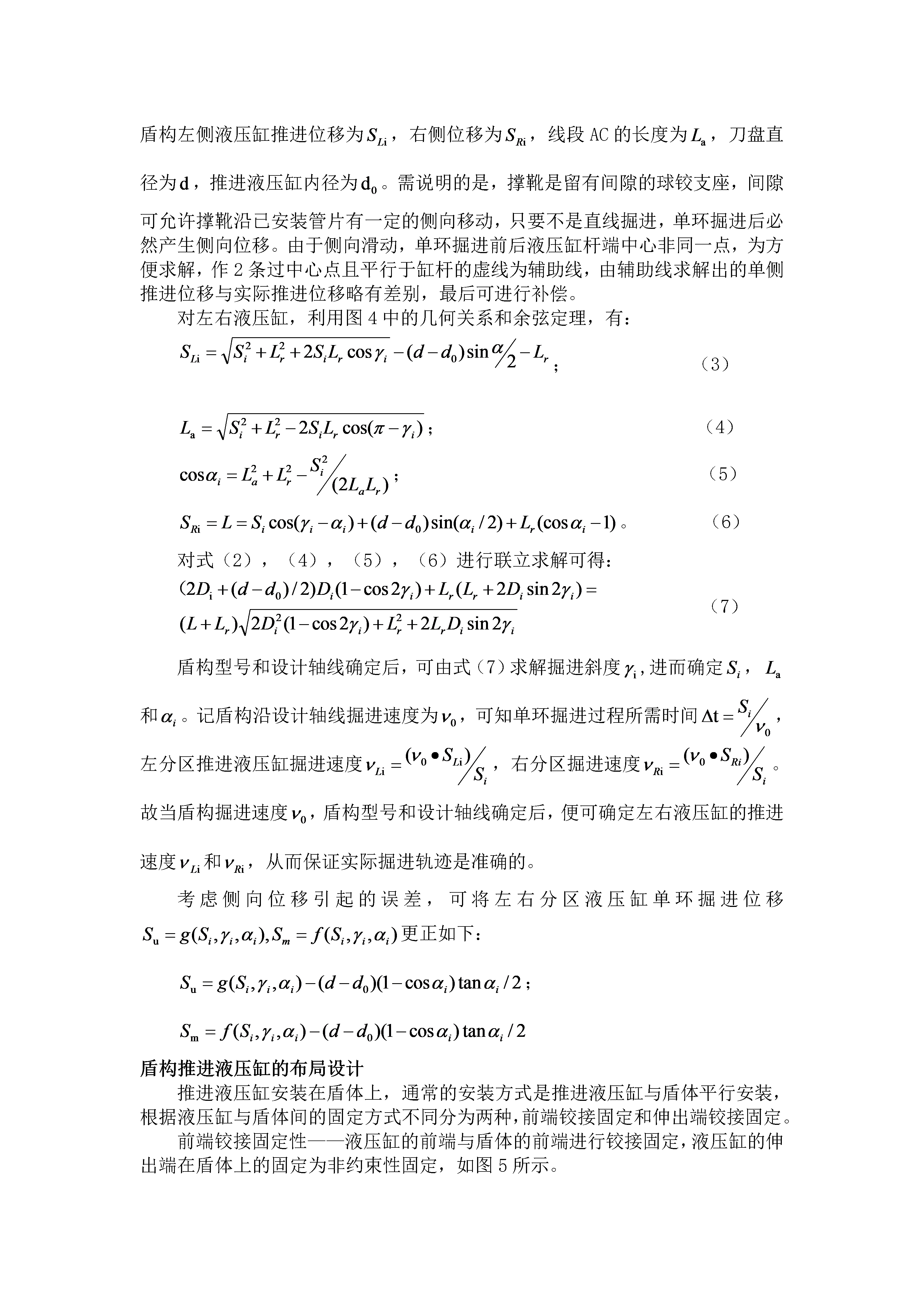
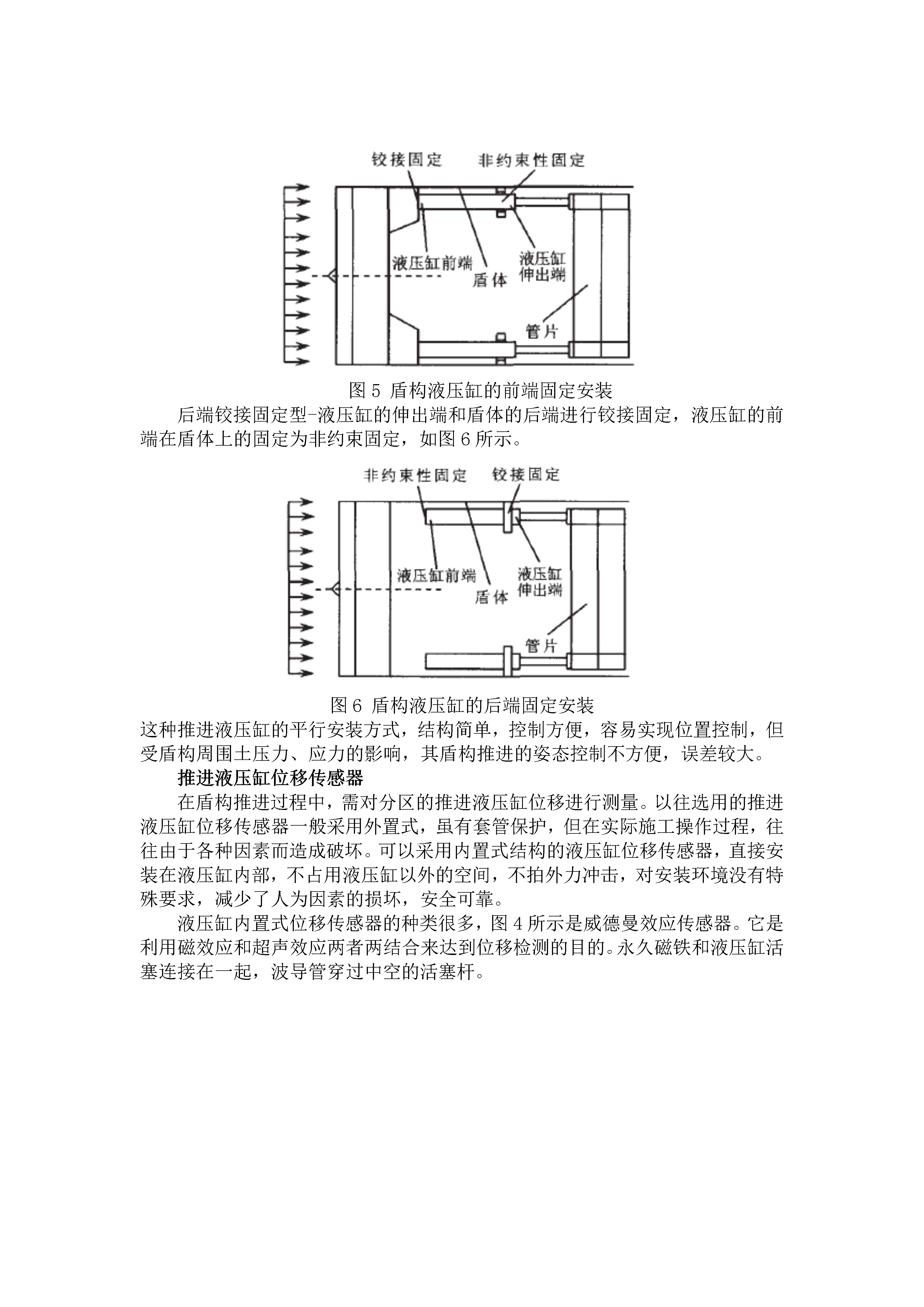
土压平衡盾构机推进液压系统设计研究.doc

胜利****实阿

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

土压平衡盾构机推进液压系统设计研究.doc
隧道掘进机推进液压系统设计研究本章主要对盾构掘进机推进液压系统的研究现状进行了综述,同时指出了研究中存在的难点和有待研究的问题,明确了本文的研究方向。硬岩掘进机的关键技术为:推进液压缸分区性能研究,推进液压缸控制方式研究以及液压缸推进速度控制研究。目前对硬岩掘进机推进液压系统的研究主要集中在对推进液压缸分区布置的优化研究、对推进液压系统的改进设计以及对推进速度的控制算法研究三个方面,其中尤对硬岩掘进机推进液压系统的控制研究居多。在硬岩掘进机分区性能研究方面,邓颖聪,郭为忠,高峰等提出了推进系统超冗余并联机

土压平衡盾构机推进液压系统设计研究.doc
隧道掘进机推进液压系统设计研究本章主要对盾构掘进机推进液压系统的研究现状进行了综述,同时指出了研究中存在的难点和有待研究的问题,明确了本文的研究方向。硬岩掘进机的关键技术为:推进液压缸分区性能研究,推进液压缸控制方式研究以及液压缸推进速度控制研究。目前对硬岩掘进机推进液压系统的研究主要集中在对推进液压缸分区布置的优化研究、对推进液压系统的改进设计以及对推进速度的控制算法研究三个方面,其中尤对硬岩掘进机推进液压系统的控制研究居多。在硬岩掘进机分区性能研究方面,邓颖聪,郭为忠,高峰等提出了推进系统超冗余并联机
土压平衡盾构机推进液压系统设计研究.doc
隧道掘进机推进液压系统设计研究本章主要对盾构掘进机推进液压系统的研究现状进行了综述,同时指出了研究中存在的难点和有待研究的问题,明确了本文的研究方向。硬岩掘进机的关键技术为:推进液压缸分区性能研究,推进液压缸控制方式研究以及液压缸推进速度控制研究。目前对硬岩掘进机推进液压系统的研究主要集中在对推进液压缸分区布置的优化研究、对推进液压系统的改进设计以及对推进速度的控制算法研究三个方面,其中尤对硬岩掘进机推进液压系统的控制研究居多。在硬岩掘进机分区性能研究方面,邓颖聪,郭为忠,高峰等提出了推进系统超冗余并联机

土压平衡盾构机推进液压系统设计研究.doc
隧道掘进机推进液压系统设计研究本章主要对盾构掘进机推进液压系统的研究现状进行了综述,同时指出了研究中存在的难点和有待研究的问题,明确了本文的研究方向。硬岩掘进机的关键技术为:推进液压缸分区性能研究,推进液压缸控制方式研究以及液压缸推进速度控制研究。目前对硬岩掘进机推进液压系统的研究主要集中在对推进液压缸分区布置的优化研究、对推进液压系统的改进设计以及对推进速度的控制算法研究三个方面,其中尤对硬岩掘进机推进液压系统的控制研究居多。在硬岩掘进机分区性能研究方面,邓颖聪,郭为忠,高峰等提出了推进系统超冗余并联机
土压平衡盾构机推进液压系统设计研究.doc
隧道掘进机推进液压系统设计研究本章主要对盾构掘进机推进液压系统的研究现状进行了综述,同时指出了研究中存在的难点和有待研究的问题,明确了本文的研究方向。硬岩掘进机的关键技术为:推进液压缸分区性能研究,推进液压缸控制方式研究以及液压缸推进速度控制研究。目前对硬岩掘进机推进液压系统的研究主要集中在对推进液压缸分区布置的优化研究、对推进液压系统的改进设计以及对推进速度的控制算法研究三个方面,其中尤对硬岩掘进机推进液压系统的控制研究居多。在硬岩掘进机分区性能研究方面,邓颖聪,郭为忠,高峰等提出了推进系统超冗余并联机