
基于天线阵列的二维平面定位方法.pdf

淑然****by

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于天线阵列的二维平面定位方法.pdf
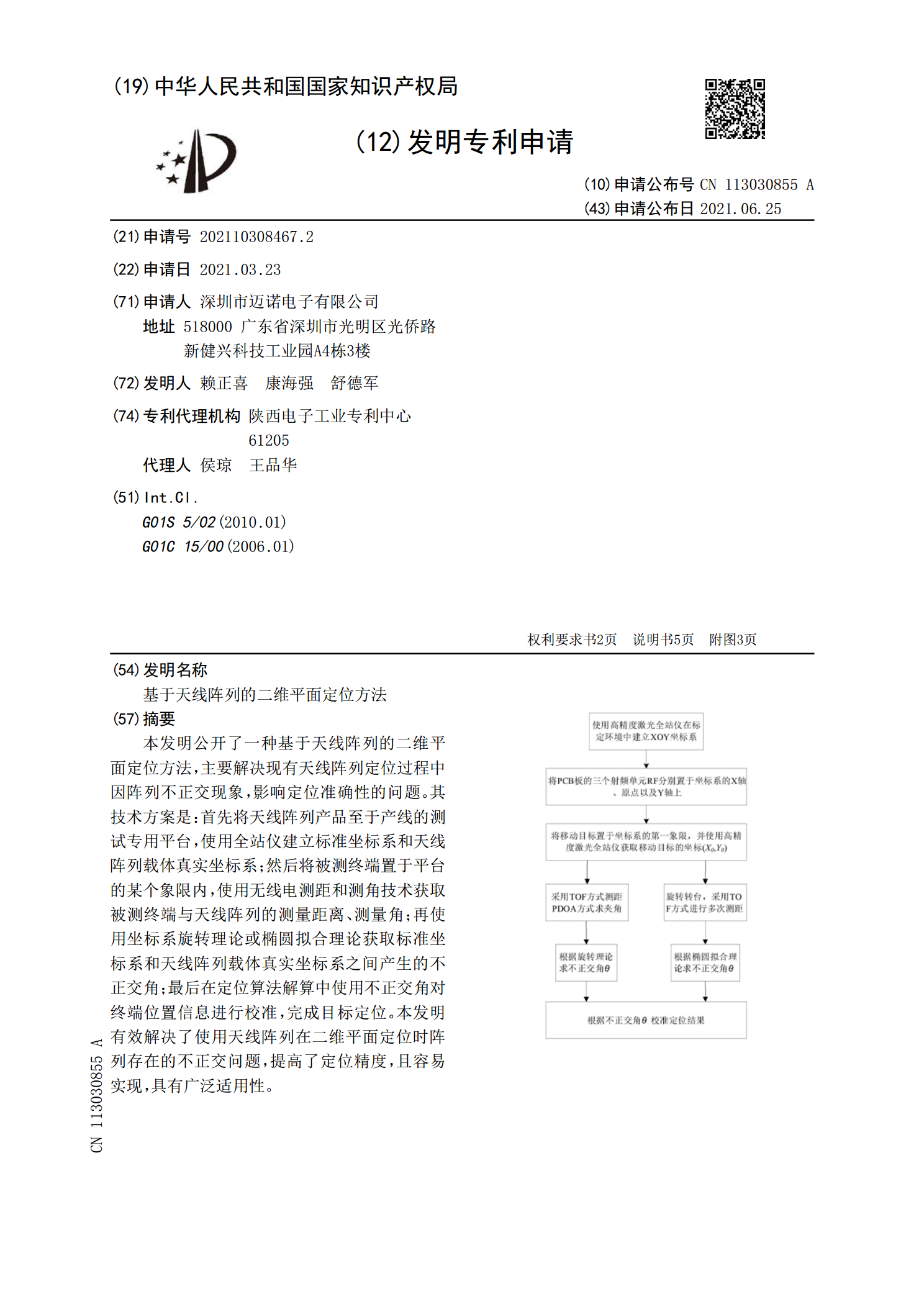
本发明公开了一种基于天线阵列的二维平面定位方法,主要解决现有天线阵列定位过程中因阵列不正交现象,影响定位准确性的问题。其技术方案是:首先将天线阵列产品至于产线的测试专用平台,使用全站仪建立标准坐标系和天线阵列载体真实坐标系;然后将被测终端置于平台的某个象限内,使用无线电测距和测角技术获取被测终端与天线阵列的测量距离、测量角;再使用坐标系旋转理论或椭圆拟合理论获取标准坐标系和天线阵列载体真实坐标系之间产生的不正交角;最后在定位算法解算中使用不正交角对终端位置信息进行校准,完成目标定位。本发明有效解决了使用天
基于量子蜘蛛群演化机制的平面天线阵列稀疏方法.pdf
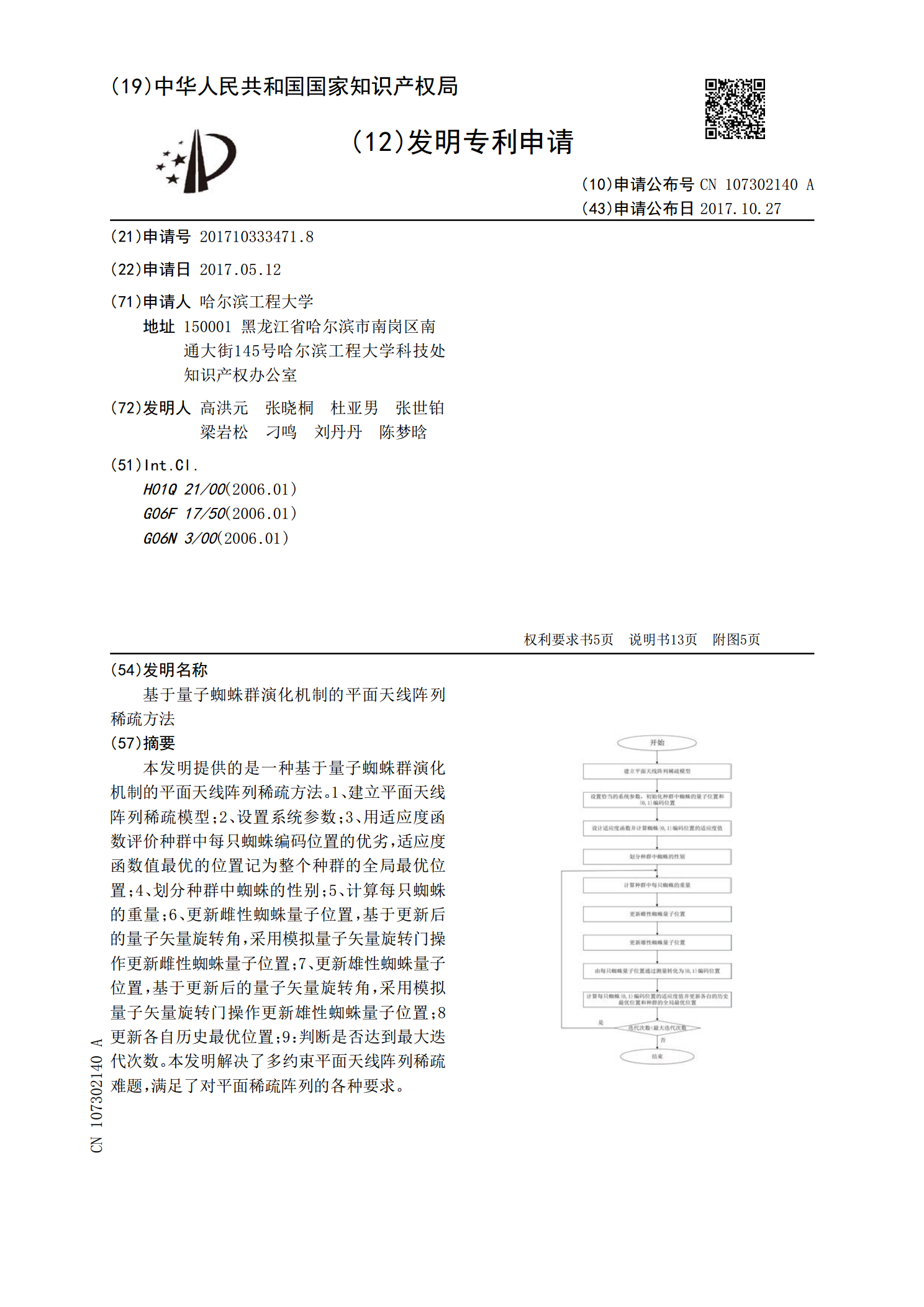
本发明提供的是一种基于量子蜘蛛群演化机制的平面天线阵列稀疏方法。1、建立平面天线阵列稀疏模型;2、设置系统参数;3、用适应度函数评价种群中每只蜘蛛编码位置的优劣,适应度函数值最优的位置记为整个种群的全局最优位置;4、划分种群中蜘蛛的性别;5、计算每只蜘蛛的重量;6、更新雌性蜘蛛量子位置,基于更新后的量子矢量旋转角,采用模拟量子矢量旋转门操作更新雌性蜘蛛量子位置;7、更新雄性蜘蛛量子位置,基于更新后的量子矢量旋转角,采用模拟量子矢量旋转门操作更新雄性蜘蛛量子位置;8更新各自历史最优位置;9:判断是否达到最大
基于物品定位的RFID阅读器天线阵列的排布优化方法.pdf
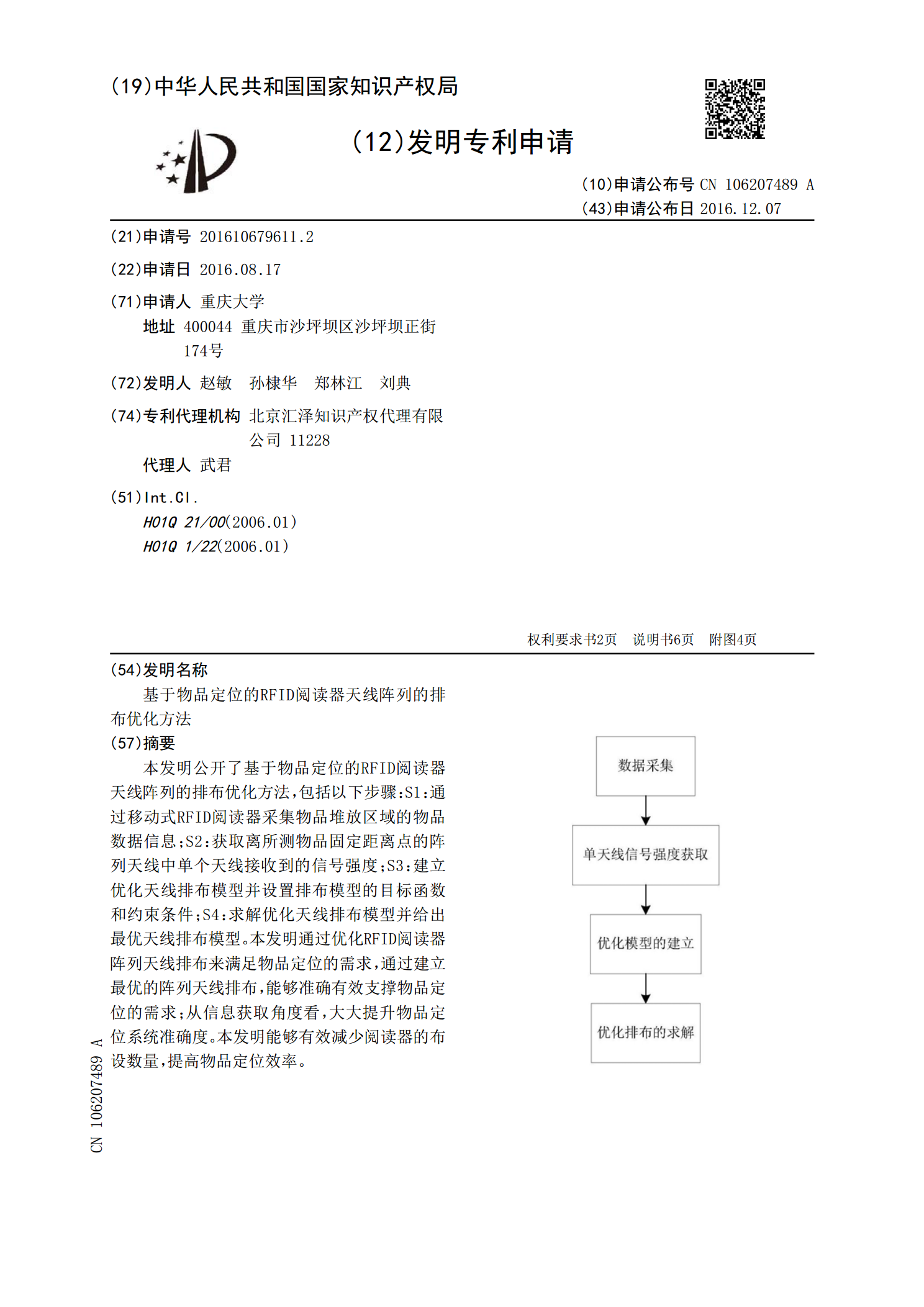
本发明公开了基于物品定位的RFID阅读器天线阵列的排布优化方法,包括以下步骤:S1:通过移动式RFID阅读器采集物品堆放区域的物品数据信息;S2:获取离所测物品固定距离点的阵列天线中单个天线接收到的信号强度;S3:建立优化天线排布模型并设置排布模型的目标函数和约束条件;S4:求解优化天线排布模型并给出最优天线排布模型。本发明通过优化RFID阅读器阵列天线排布来满足物品定位的需求,通过建立最优的阵列天线排布,能够准确有效支撑物品定位的需求;从信息获取角度看,大大提升物品定位系统准确度。本发明能够有效减少阅读

一种基于阵列天线的多无人装置导航定位方法及系统.pdf
本发明公开了一种基于阵列天线的多无人装置导航定位方法及系统,方法包括:在多无人装置编队的每一个无人装置上装备阵列天线,建立基于LOS向量的无人装置定位模型;根据主无人装置与从无人装置之间的阵列信号探测,构建主无人装置与从无人装置之间的通信链路,并得到双向LOS向量;根据主无人装置的位置信息,利用基于LOS向量的USV双矢量相对位置测量方法得到从无人装置的位置观测信息;通过无人装置上的惯性导航设备获取位姿状态信息;通过扩展卡尔曼滤波将位置观测信息与位姿状态信息进行融合滤波,得到从无人装置的实时位姿信息。本发
基于极化转换超表面的天线单元、天线阵列及阵列天线.pdf
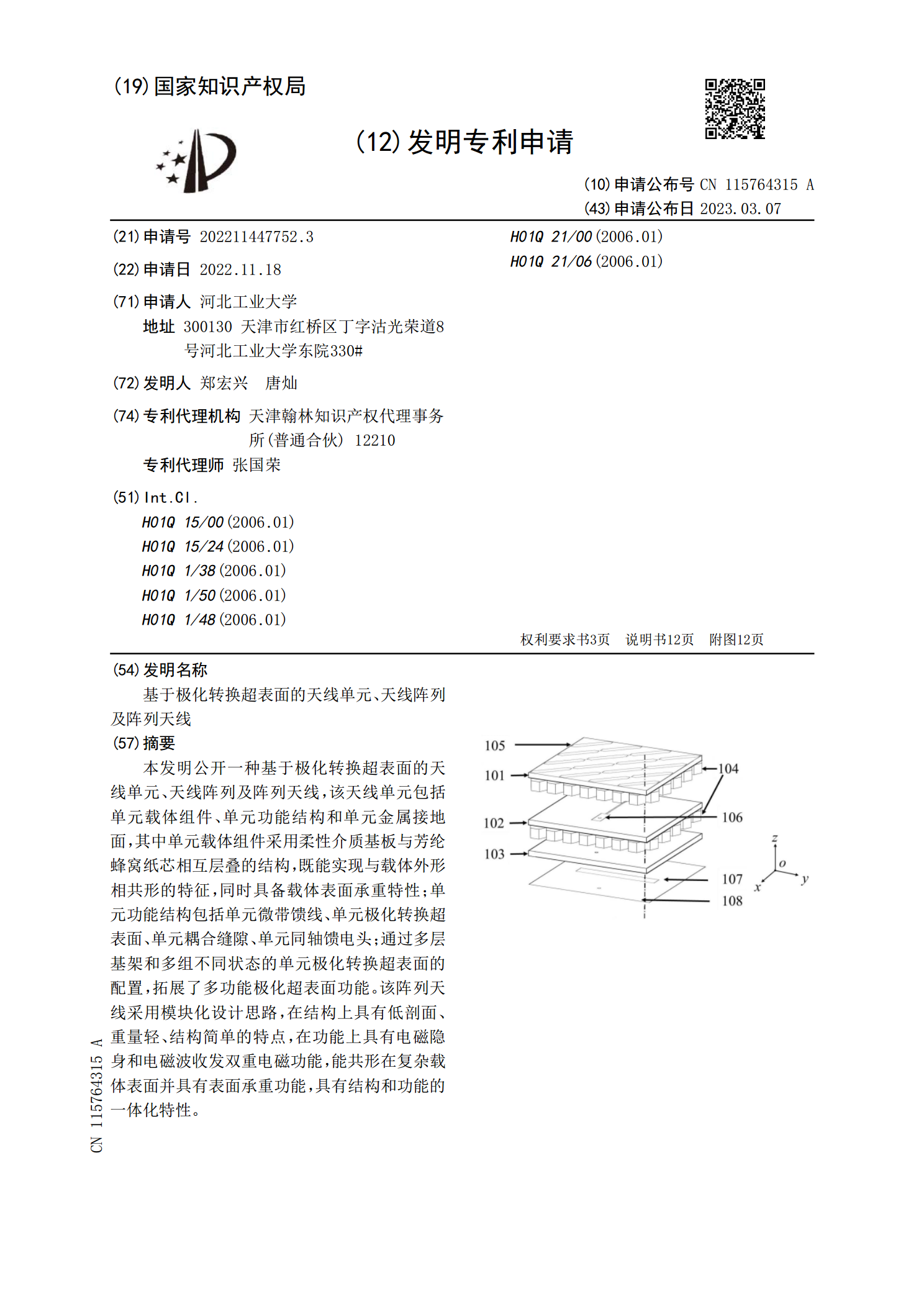
本发明公开一种基于极化转换超表面的天线单元、天线阵列及阵列天线,该天线单元包括单元载体组件、单元功能结构和单元金属接地面,其中单元载体组件采用柔性介质基板与芳纶蜂窝纸芯相互层叠的结构,既能实现与载体外形相共形的特征,同时具备载体表面承重特性;单元功能结构包括单元微带馈线、单元极化转换超表面、单元耦合缝隙、单元同轴馈电头;通过多层基架和多组不同状态的单元极化转换超表面的配置,拓展了多功能极化超表面功能。该阵列天线采用模块化设计思路,在结构上具有低剖面、重量轻、结构简单的特点,在功能上具有电磁隐身和电磁波收发