
面向工业零件6D位姿估计的方法及计算机可读存储介质.pdf

努力****元恺

1/10
2/10
3/10
4/10
5/10
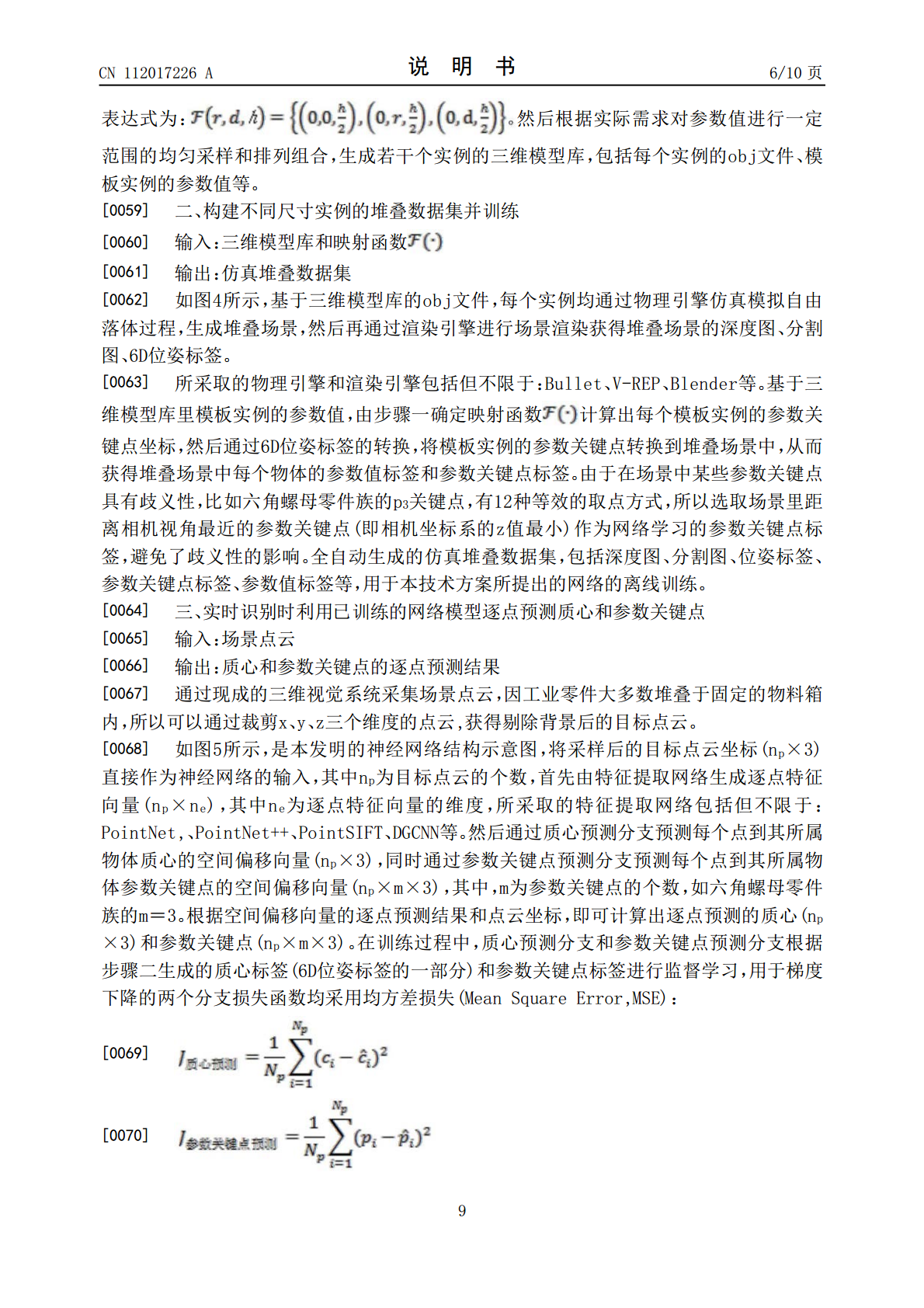
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
面向工业零件6D位姿估计的方法及计算机可读存储介质.pdf
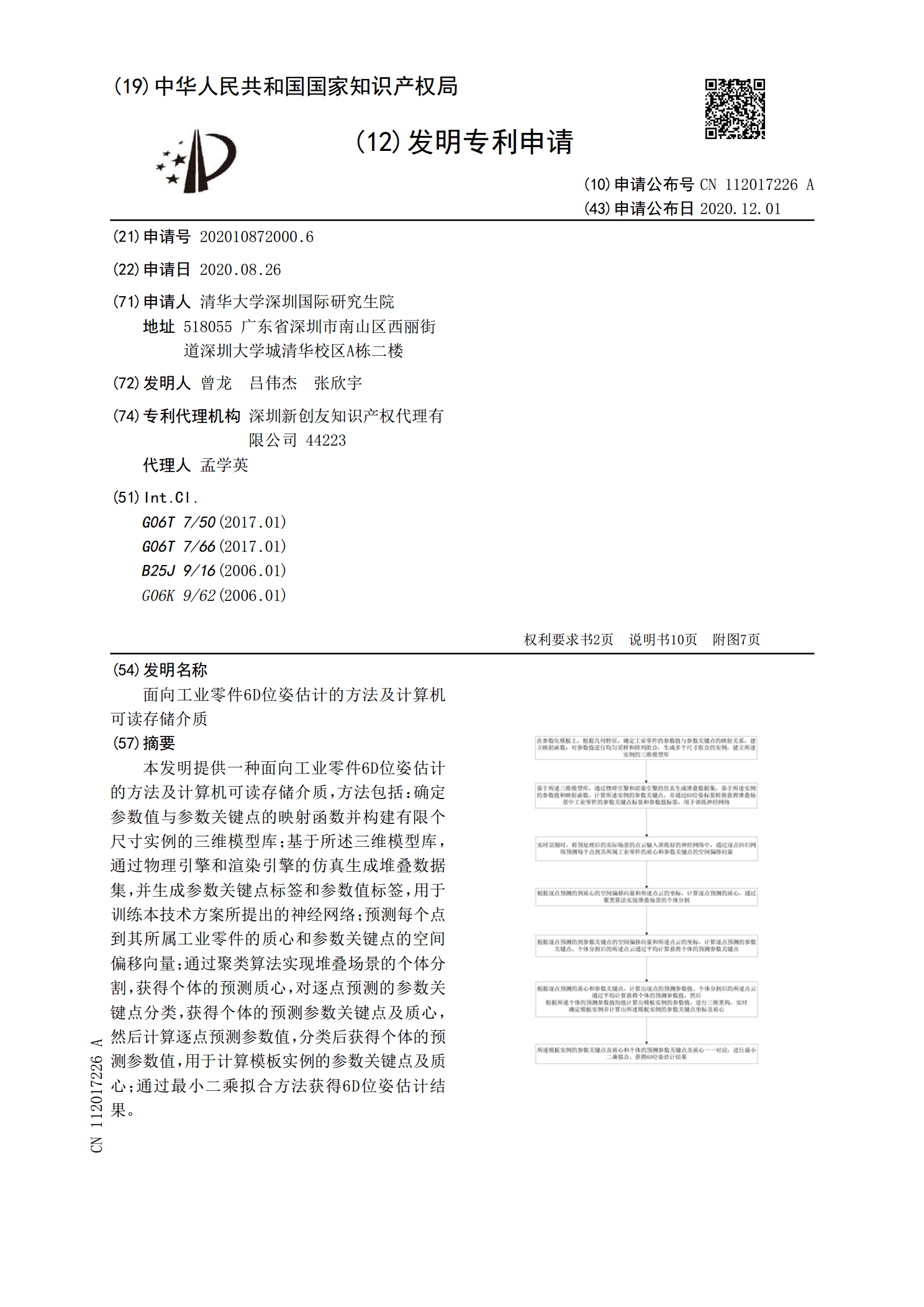
本发明提供一种面向工业零件6D位姿估计的方法及计算机可读存储介质,方法包括:确定参数值与参数关键点的映射函数并构建有限个尺寸实例的三维模型库;基于所述三维模型库,通过物理引擎和渲染引擎的仿真生成堆叠数据集,并生成参数关键点标签和参数值标签,用于训练本技术方案所提出的神经网络;预测每个点到其所属工业零件的质心和参数关键点的空间偏移向量;通过聚类算法实现堆叠场景的个体分割,获得个体的预测质心,对逐点预测的参数关键点分类,获得个体的预测参数关键点及质心,然后计算逐点预测参数值,分类后获得个体的预测参数值,用于计
估计位姿的方法、装置及计算机可读存储介质.pdf
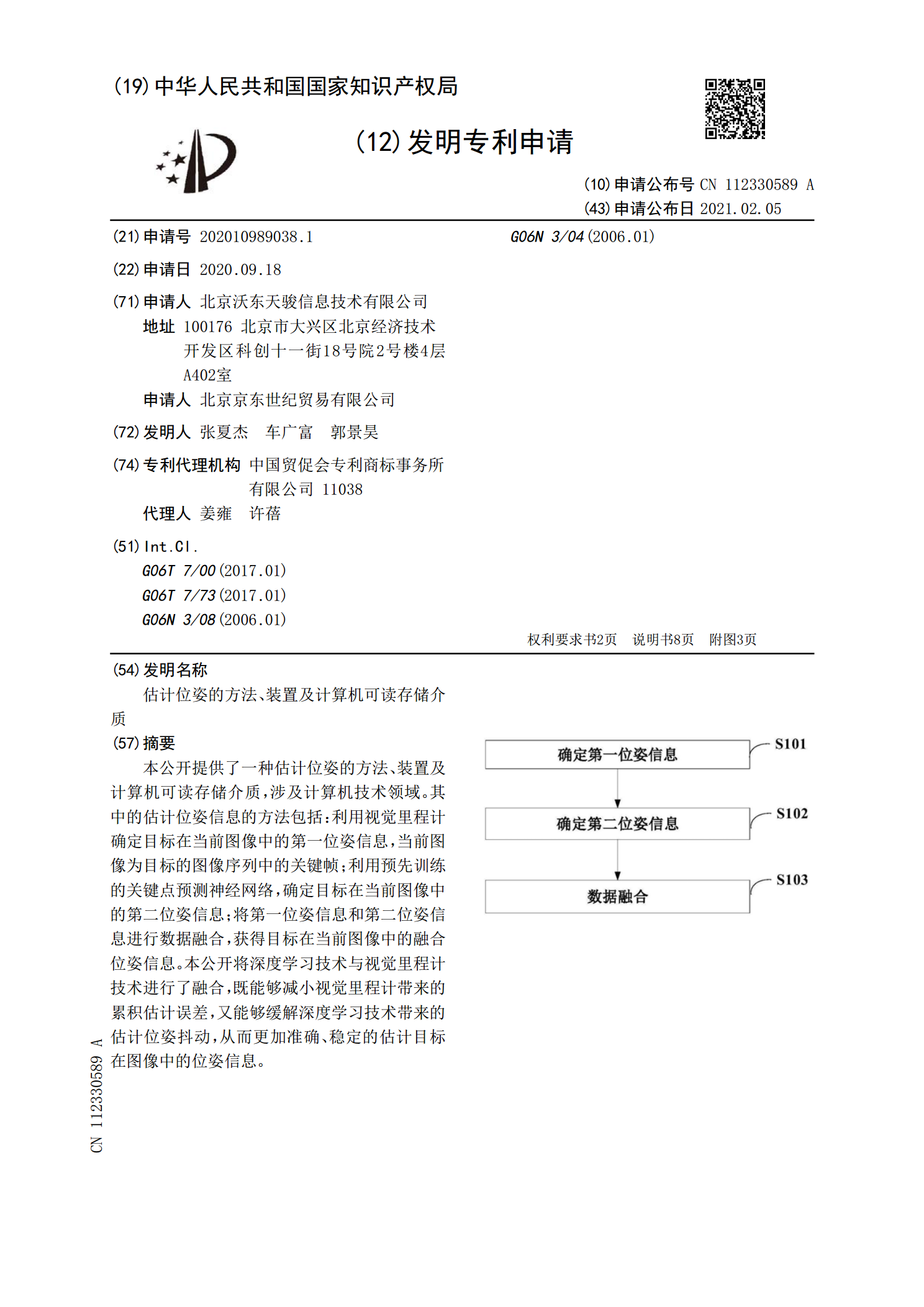
本公开提供了一种估计位姿的方法、装置及计算机可读存储介质,涉及计算机技术领域。其中的估计位姿信息的方法包括:利用视觉里程计确定目标在当前图像中的第一位姿信息,当前图像为目标的图像序列中的关键帧;利用预先训练的关键点预测神经网络,确定目标在当前图像中的第二位姿信息;将第一位姿信息和第二位姿信息进行数据融合,获得目标在当前图像中的融合位姿信息。本公开将深度学习技术与视觉里程计技术进行了融合,既能够减小视觉里程计带来的累积估计误差,又能够缓解深度学习技术带来的估计位姿抖动,从而更加准确、稳定的估计目标在图像中的
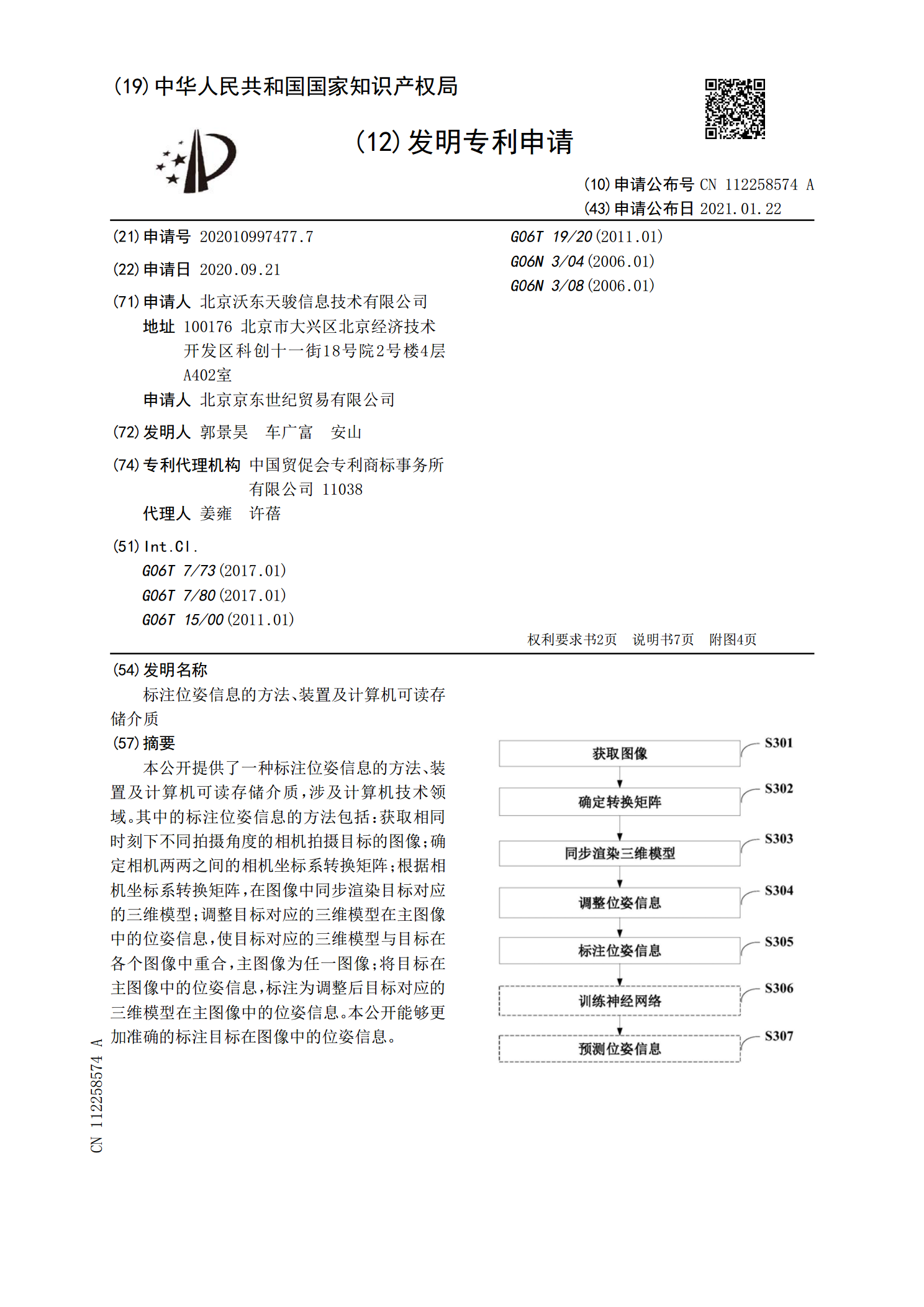
标注位姿信息的方法、装置及计算机可读存储介质.pdf
本公开提供了一种标注位姿信息的方法、装置及计算机可读存储介质,涉及计算机技术领域。其中的标注位姿信息的方法包括:获取相同时刻下不同拍摄角度的相机拍摄目标的图像;确定相机两两之间的相机坐标系转换矩阵;根据相机坐标系转换矩阵,在图像中同步渲染目标对应的三维模型;调整目标对应的三维模型在主图像中的位姿信息,使目标对应的三维模型与目标在各个图像中重合,主图像为任一图像;将目标在主图像中的位姿信息,标注为调整后目标对应的三维模型在主图像中的位姿信息。本公开能够更加准确的标注目标在图像中的位姿信息。

获取车辆位姿的方法、电子设备和计算机可读存储介质.pdf
本申请涉及电子技术领域,提供了一种获取车辆位姿的方法、电子设备和计算机可读存储介质,该方法包括:根据手机图像在预设视觉系统中的多个环境图像中进行检索,得到第一候选图像集合,第一候选图像集合中包括多个候选环境图像,其中,每个候选环境图像与一个手机图像的相似度大于预设相似度阈值,手机图像为采用车载摄像头之外的终端设备所拍摄的图像;获取任意两个相邻位置的车载摄像头各自拍摄的车载图像中交叉区域的交叉区域特征点形成的交叉区域特征点集合;从第一候选图像集合中选择出与交叉区域特征点集合的重叠程度高的候选环境图像确定为目
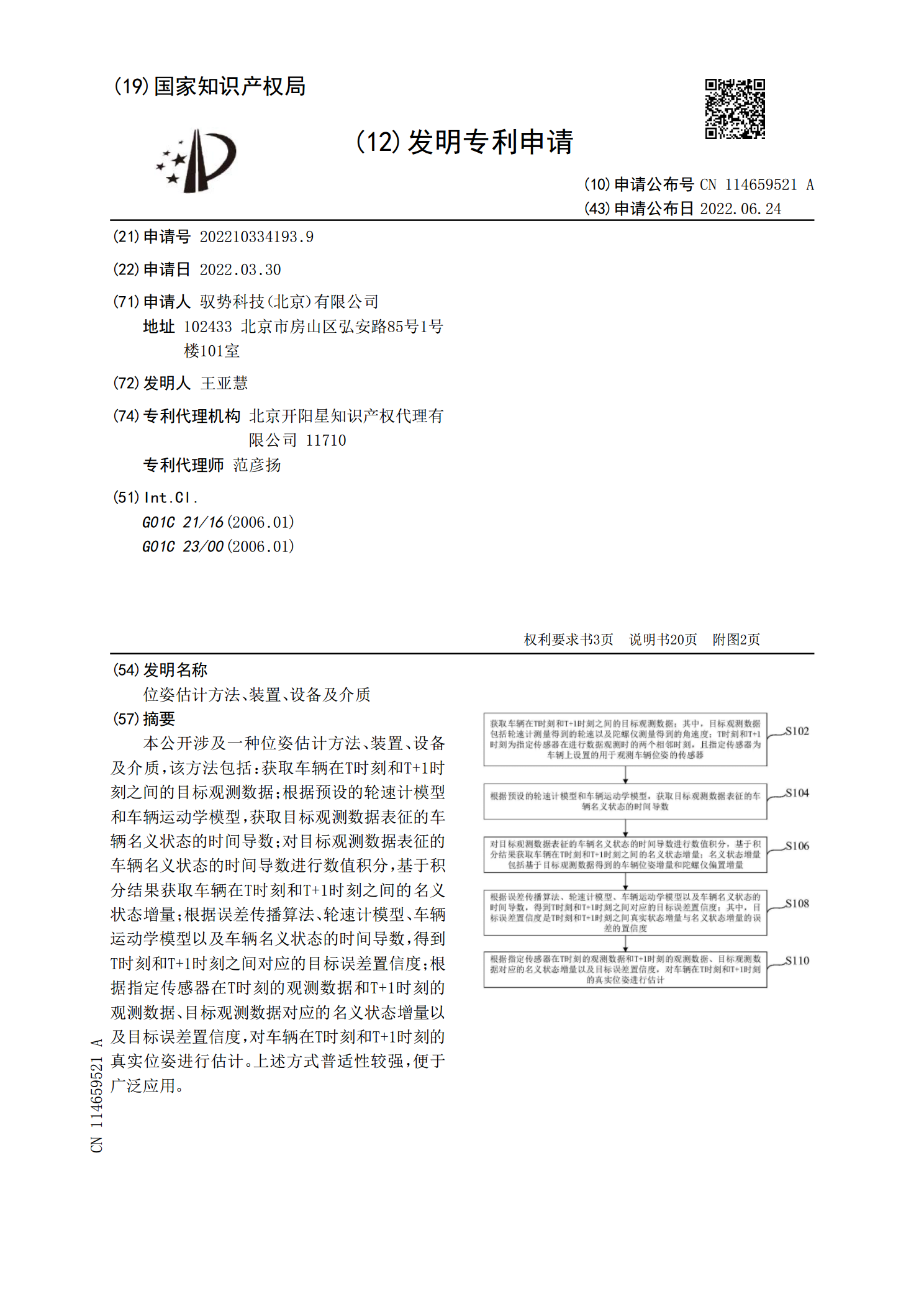
位姿估计方法、装置、设备及介质.pdf
本公开涉及一种位姿估计方法、装置、设备及介质,该方法包括:获取车辆在T时刻和T+1时刻之间的轮速计观测数据;根据预设轮速计模型和车辆运动学模型,获取轮速计观测数据表征的车辆名义状态的时间导数;对轮速计观测数据表征的车辆名义状态的时间导数进行数值积分,基于积分结果获取车辆在T时刻和T+1时刻之间的名义位姿增量;根据误差传播算法、轮速计模型、车辆运动学模型以及车辆名义状态的时间导数,得到T时刻和T+1时刻之间对应的轮速计误差置信度;根据指定传感器在T时刻观测数据和T+1时刻观测数据、轮速计观测数据对应的名义位