
一种六轴动作捕捉系统及动作捕捉方法.pdf

大渊****公主


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种六轴动作捕捉系统及动作捕捉方法.pdf
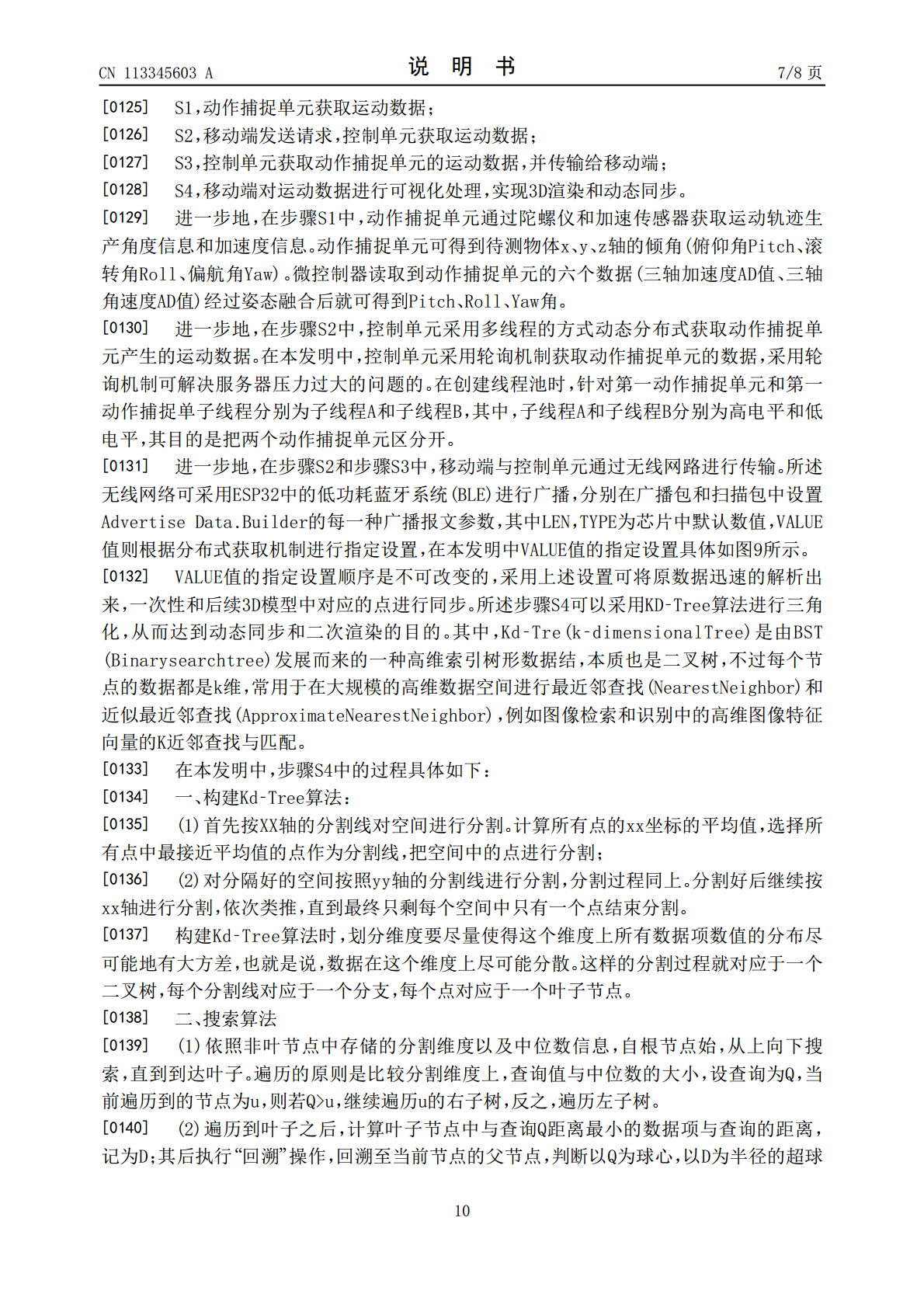
本发明属于动作捕捉及数据处理领域,公开了一种六轴动作捕捉系统,其包括动作捕捉单元、控制单元、移动端和上位机;动作捕捉单元与控制单元之间通过硬件接口进行连接,控制单元与上位机和移动端之间均通过无线网络连接。系统结构简单,管理方便,且系统响应快捷、准确,高效。采用上述系统进行动作捕捉的方法为:S1,动作捕捉单元根据运动轨迹产生运动数据;S2,移动端发送请求,控制单元获取动作捕捉单元获取的数据;S3,控制单元将运动数据传输给移动端;S4,移动端对运动数据进行可视化处理,实现3D渲染和动态同步。本发明可在极大程度
信息终端装置、动作捕捉系统及动作捕捉方法.pdf
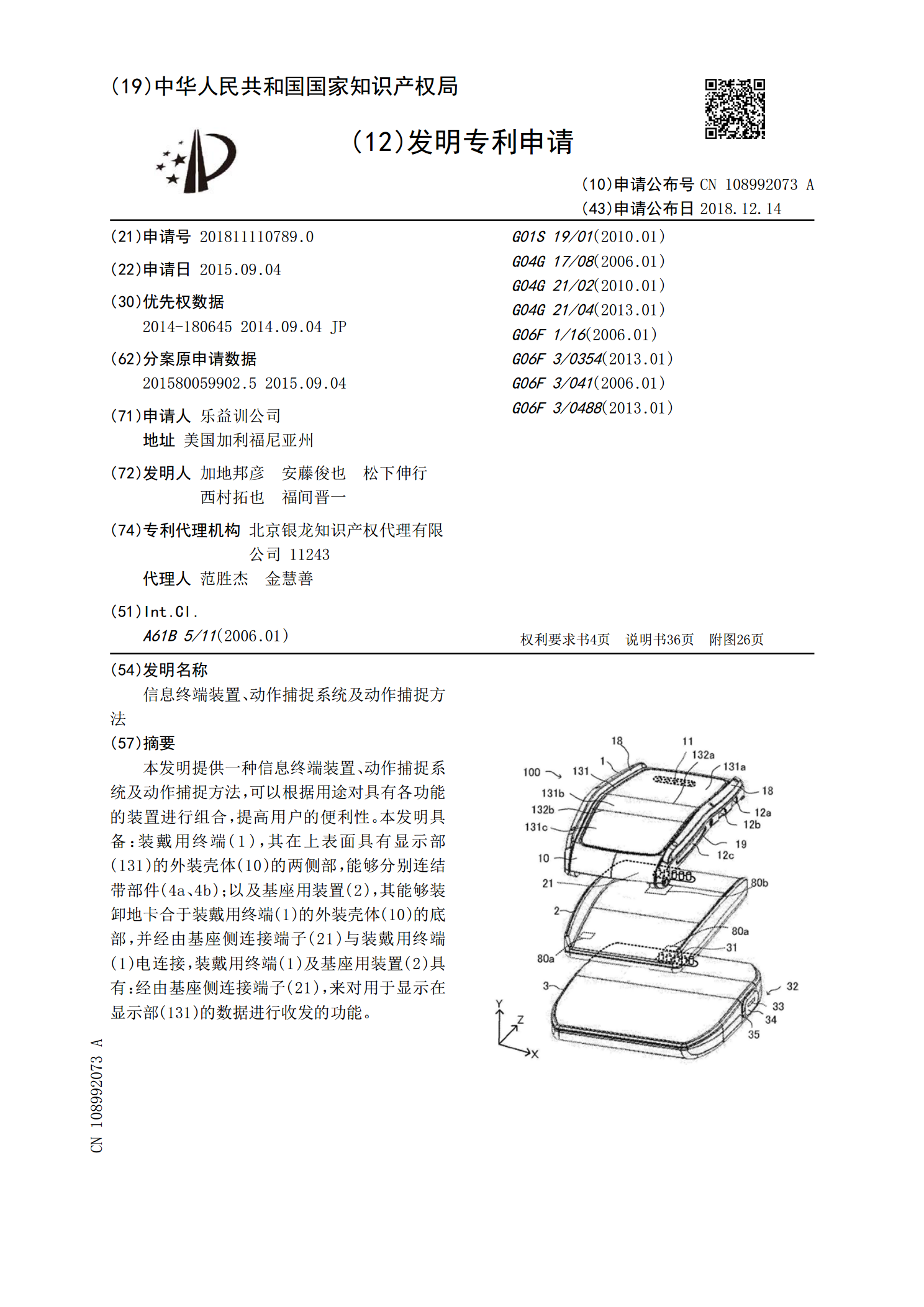
本发明提供一种信息终端装置、动作捕捉系统及动作捕捉方法,可以根据用途对具有各功能的装置进行组合,提高用户的便利性。本发明具备:装戴用终端(1),其在上表面具有显示部(131)的外装壳体(10)的两侧部,能够分别连结带部件(4a、4b);以及基座用装置(2),其能够装卸地卡合于装戴用终端(1)的外装壳体(10)的底部,并经由基座侧连接端子(21)与装戴用终端(1)电连接,装戴用终端(1)及基座用装置(2)具有:经由基座侧连接端子(21),来对用于显示在显示部(131)的数据进行收发的功能。
一种动作捕捉手套及动作捕捉系统.pdf
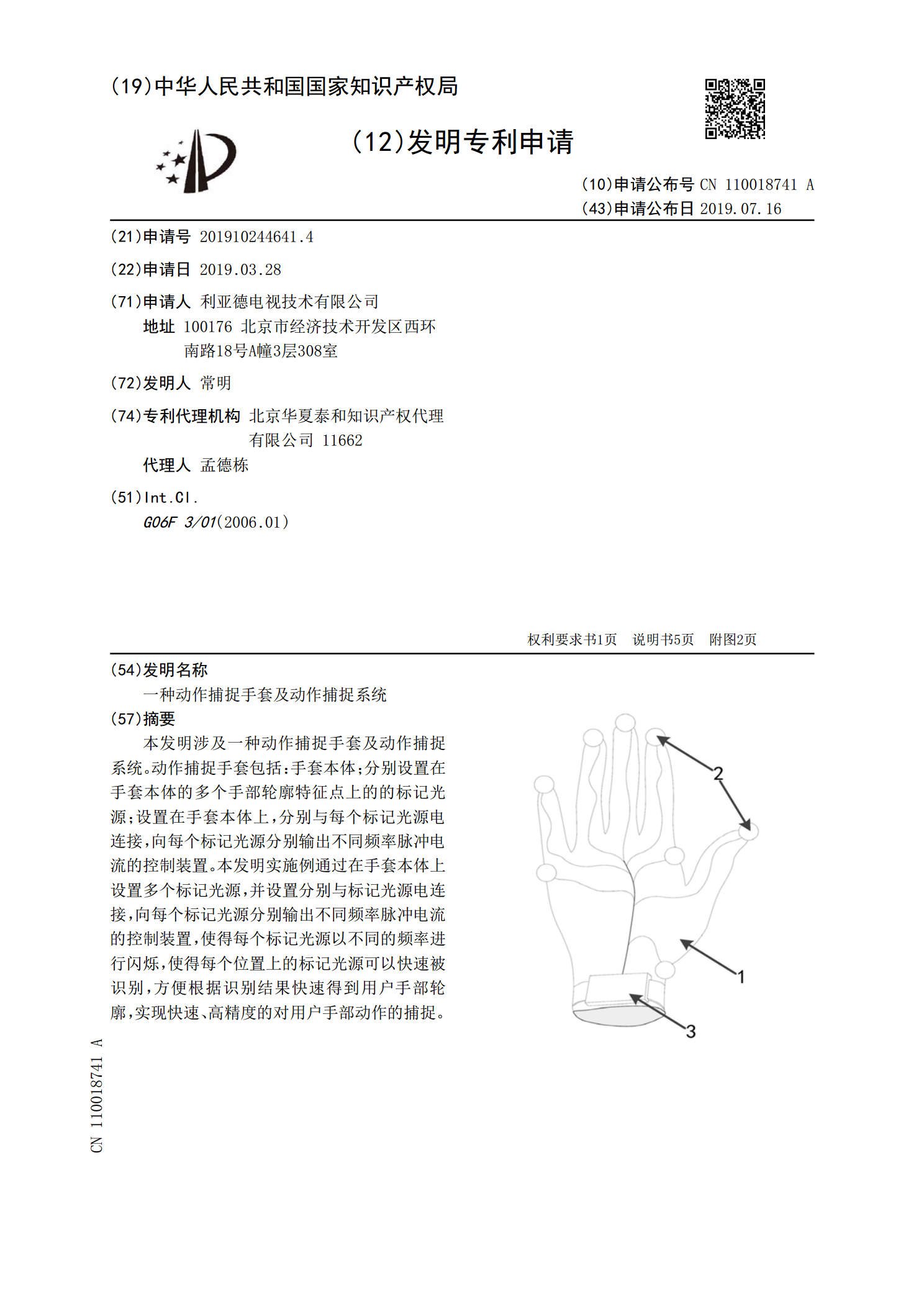
本发明涉及一种动作捕捉手套及动作捕捉系统。动作捕捉手套包括:手套本体;分别设置在手套本体的多个手部轮廓特征点上的的标记光源;设置在手套本体上,分别与每个标记光源电连接,向每个标记光源分别输出不同频率脉冲电流的控制装置。本发明实施例通过在手套本体上设置多个标记光源,并设置分别与标记光源电连接,向每个标记光源分别输出不同频率脉冲电流的控制装置,使得每个标记光源以不同的频率进行闪烁,使得每个位置上的标记光源可以快速被识别,方便根据识别结果快速得到用户手部轮廓,实现快速、高精度的对用户手部动作的捕捉。

一种VR虚拟现实动作捕捉系统和动作捕捉方法.pdf
本发明提供了VR虚拟现实动作捕捉系统,其包括:一动作捕捉头盔,其包括一显示屏,其用于向演员显示由后述图像处理装置合成的图像;一头部动作捕捉模块,其用于捕捉动作捕捉头盔的动作;一第一通信模块,其连接后述图像处理装置;一图像处理装置,其用于创建三维场景,并将三维场景的图像传输至动作捕捉头盔的显示屏,该图像处理装置包括一第二通讯模块,其用于与第一通讯模块进行有线或无线通讯。还提供了VR虚拟现实动作捕捉方法。能够在表演时向演员提供最终或者接近最终的画面,为演员的演出提供参考。

信息终端装置、动作捕捉系统及动作捕捉方法.pdf
可以根据用途对具有各功能的装置进行组合,提高用户的便利性。本发明具备:装戴用终端(1),其在上表面具有显示部(131)的外装壳体(10)的两侧部,能够分别连结带部件(4a、4b);以及基座用装置(2),其能够装卸地卡合于装戴用终端(1)的外装壳体(10)的底部,并经由基座侧连接端子(21)与装戴用终端(1)电连接,装戴用终端(1)及基座用装置(2)具有:经由基座侧连接端子(21),来对用于显示在显示部(131)的数据进行收发的功能。