
基于邻居像素点的共生局部三值模式的图像检索方法.pdf

明轩****la


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于邻居像素点的共生局部三值模式的图像检索方法.pdf
本发明公开了一种基于邻居像素点的共生局部三值模式的图像检索方法。本发明方法,包括:将局部图像中相邻半径的邻居像素点与邻居像素点均值进行比较,得到相应的局部差分,使用局部三值模式的思想进行三值编码,利用图像像素间的相似三值边缘的共生关系提取图像的特征。本发明保留了更多的特征区分性信息,同时提高了检索的精度。
一种基于尺度共生局部二值模式的图像识别方法.pdf
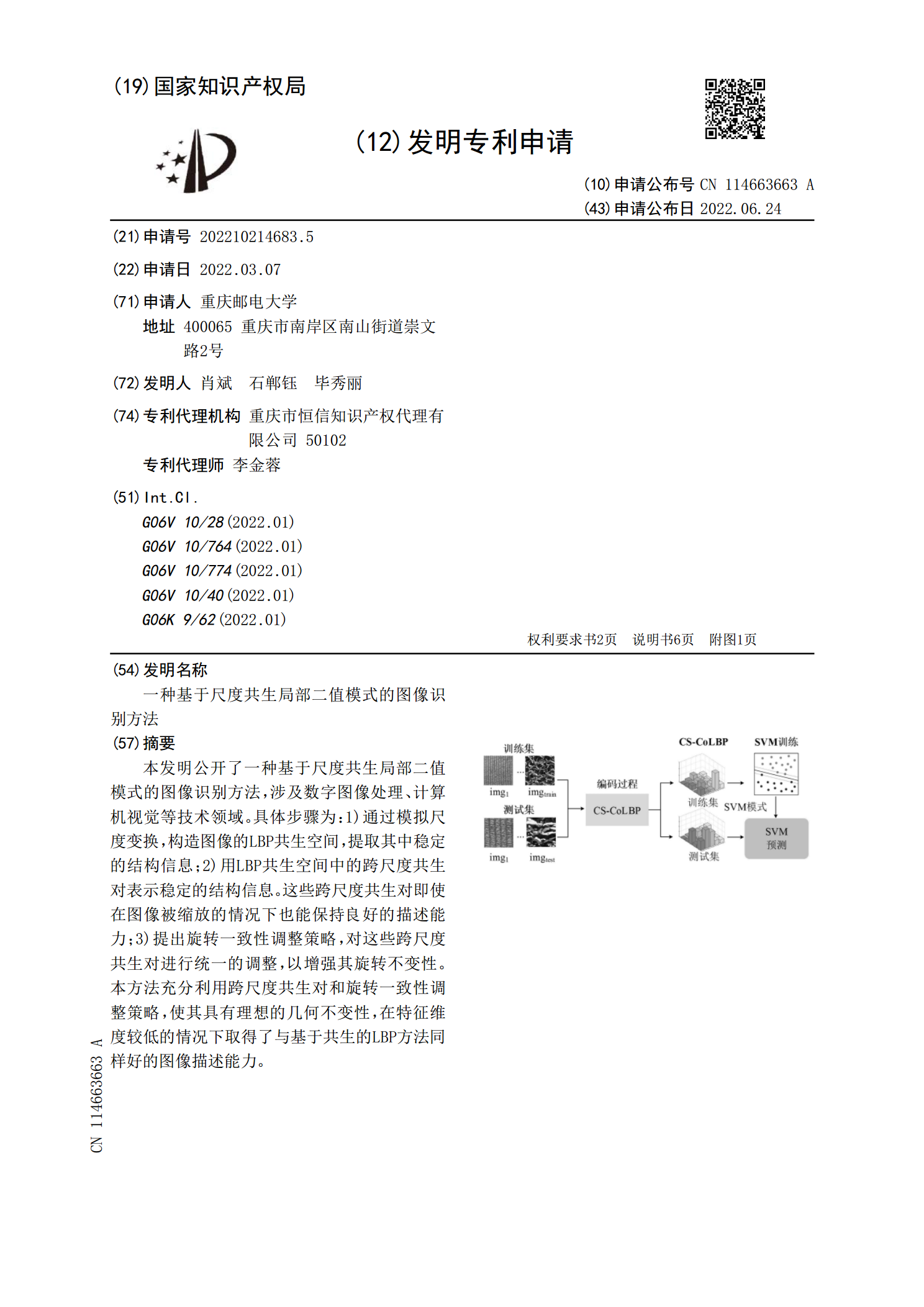
本发明公开了一种基于尺度共生局部二值模式的图像识别方法,涉及数字图像处理、计算机视觉等技术领域。具体步骤为:1)通过模拟尺度变换,构造图像的LBP共生空间,提取其中稳定的结构信息;2)用LBP共生空间中的跨尺度共生对表示稳定的结构信息。这些跨尺度共生对即使在图像被缩放的情况下也能保持良好的描述能力;3)提出旋转一致性调整策略,对这些跨尺度共生对进行统一的调整,以增强其旋转不变性。本方法充分利用跨尺度共生对和旋转一致性调整策略,使其具有理想的几何不变性,在特征维度较低的情况下取得了与基于共生的LBP方法同样

基于局部信息的图像检索方法.pdf
本发明公开了一种基于局部信息的图像检索方法,包括:获取若干原始图像;分别将各原始图像划分为多个图像区域,并提取各图像区域的局部特征向量;分别为各原始图像生成一个图像ID;分别将各原始图像的图像ID和局部特征向量进行关联;利用所述原始图像的图像ID以及局部特征向量构建图像索引;获取查询图像;计算查询图像与图像索引中每幅原始图像的全图相似度,并根据全图相似度生成检索结果列表。本发明中将图像划分为多个图像区域,分别计算各个图像区域的局部相似度,然后根据局部相似度计算得到全图相似度,提高了检索结果的准确性。

基于局部特征点的商标图像检索方法研究的开题报告.docx
基于局部特征点的商标图像检索方法研究的开题报告一、研究背景及意义随着互联网技术的快速发展,大量的商标图像在网络上广泛流传。对于商标图像的快速检索和识别,已成为商标管理和知识产权保护领域亟需解决的问题。商标图像检索技术的研究已经成为计算机视觉和图像处理领域的热点研究方向之一。商标图像的检索与识别是一个复杂的问题,主要因为商标图像存在很多变化因素,如旋转、缩放、噪声等。此外,商标的外观形状和颜色也存在很大的差异。传统的基于颜色和形状特征的商标图像检索方法存在一定的局限性,例如对于图像的旋转或缩放不变性差,同时
一种基于局部二值模式的图像盲去模糊算法.pdf
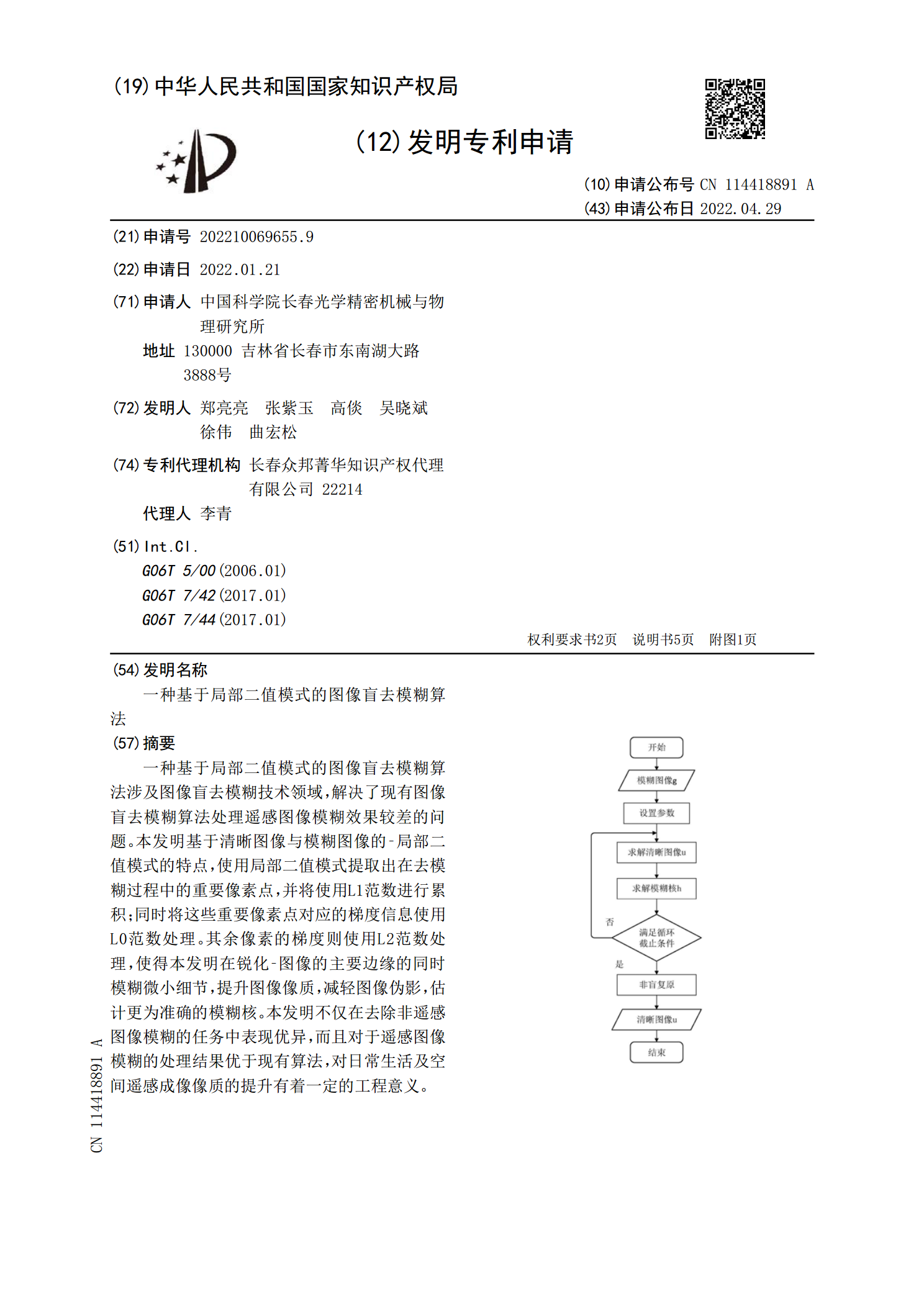
一种基于局部二值模式的图像盲去模糊算法涉及图像盲去模糊技术领域,解决了现有图像盲去模糊算法处理遥感图像模糊效果较差的问题。本发明基于清晰图像与模糊图像的‑局部二值模式的特点,使用局部二值模式提取出在去模糊过程中的重要像素点,并将使用L1范数进行累积;同时将这些重要像素点对应的梯度信息使用L0范数处理。其余像素的梯度则使用L2范数处理,使得本发明在锐化‑图像的主要边缘的同时模糊微小细节,提升图像像质,减轻图像伪影,估计更为准确的模糊核。本发明不仅在去除非遥感图像模糊的任务中表现优异,而且对于遥感图像模糊的处