
基于局部自适应判别分析的高光谱图像分类方法.pdf

佳晨****ng

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于局部自适应判别分析的高光谱图像分类方法.pdf
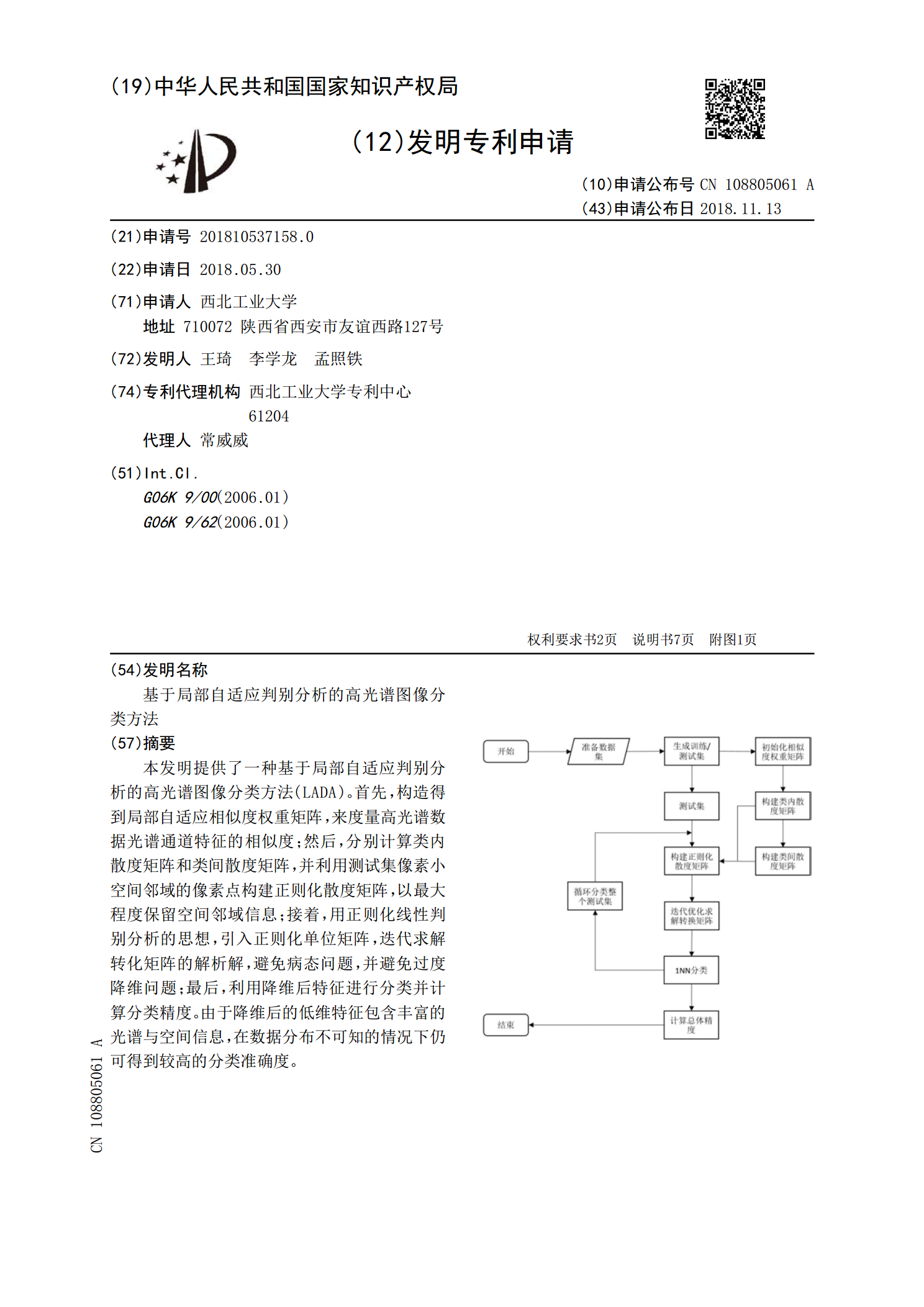
本发明提供了一种基于局部自适应判别分析的高光谱图像分类方法(LADA)。首先,构造得到局部自适应相似度权重矩阵,来度量高光谱数据光谱通道特征的相似度;然后,分别计算类内散度矩阵和类间散度矩阵,并利用测试集像素小空间邻域的像素点构建正则化散度矩阵,以最大程度保留空间邻域信息;接着,用正则化线性判别分析的思想,引入正则化单位矩阵,迭代求解转化矩阵的解析解,避免病态问题,并避免过度降维问题;最后,利用降维后特征进行分类并计算分类精度。由于降维后的低维特征包含丰富的光谱与空间信息,在数据分布不可知的情况下仍可得到

基于自适应多尺度特征提取模型的高光谱图像分类方法.pdf
本发明公开了基于自适应多尺度特征提取模型的高光谱图像分类方法,建立包含尺度参考网络和特征提取网络两部分的框架,在尺度参考网络,引入条件门控机制,通过三组模块逐级判断,将特征输入到对应尺度提取网络,深入挖掘高光谱遥感图像蕴含的丰富信息,有效结合不同尺度的特征,提高分类效果,生成精细分类结果图;在特征提取网络,设计大尺度特征提取网络和小尺度特征提取网络从两个尺度进行地物信息提取,综合考虑数据集异构性和被识别地物尺度差异性,能够自适应改变网络结构,实现多尺度特征协同学习。本发明在进行多尺度特征提取时,同时保留了

一种基于局部保留投影的高光谱图像稀疏表示分类方法.pdf
本发明公开了一种基于局部保留投影的高光谱图像稀疏表示分类方法,包括:获取高光谱图像信息构建邻接图,计算邻接图中边的权重,结合权重信息进行特征映射获得投影变换矩阵;应用局部保留投影算法,将原始高光谱图像投影至低维度的流形子空间;采用稀疏表示分类模型对投影后的图像数据进行分类得到分类结果图像。该方法首先使用局部保留投影算法降低了原始数据的维度,保留了图像的邻域细节信息,避免冗余信息对稀疏表示产生的误差和干扰,最后稀疏表示分类模型的引入完成了对投影后的图像的分类。本方法提高了局部保留投影对于特征响应的能力,增强
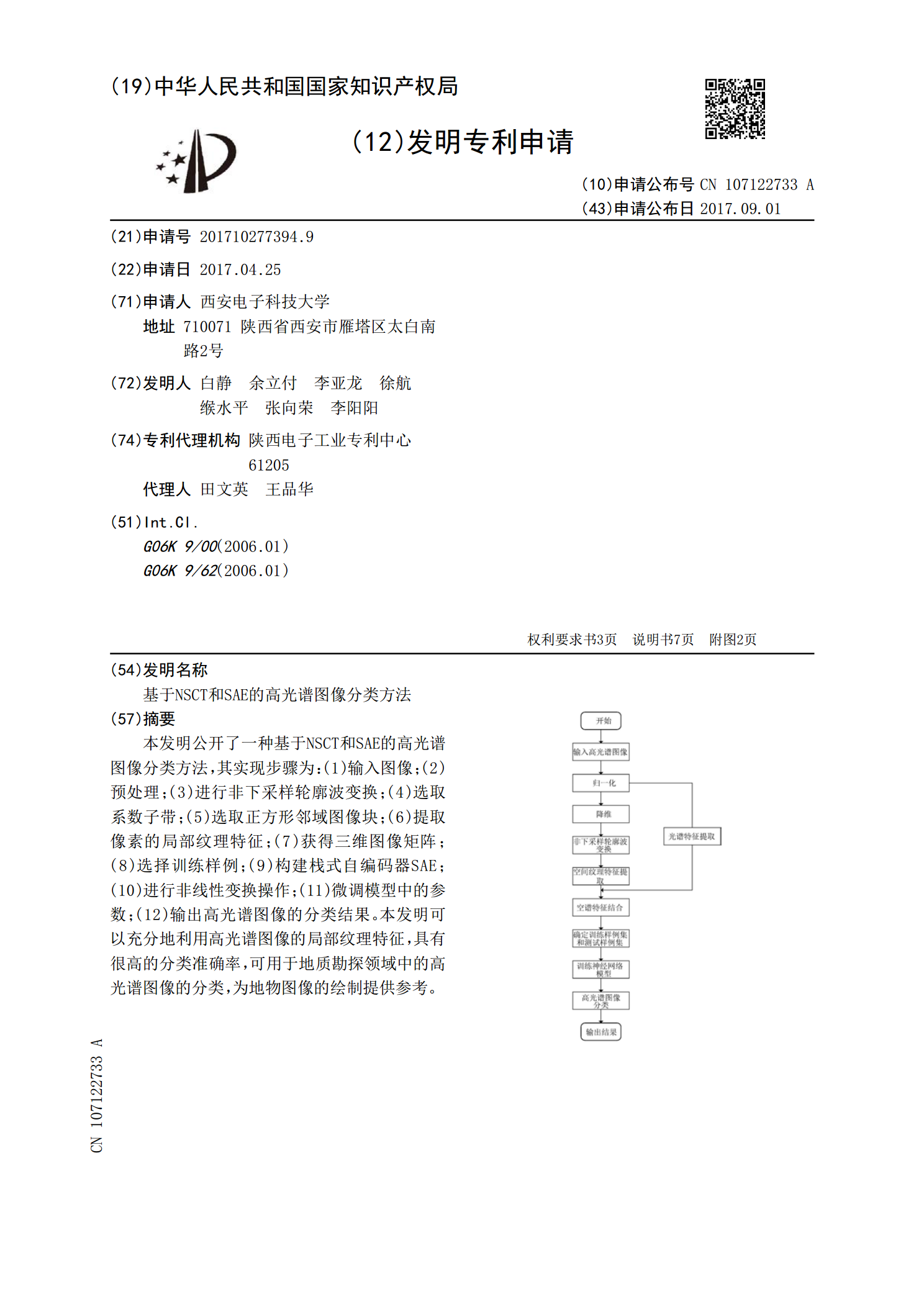
基于NSCT和SAE的高光谱图像分类方法.pdf
本发明公开了一种基于NSCT和SAE的高光谱图像分类方法,其实现步骤为:(1)输入图像;(2)预处理;(3)进行非下采样轮廓波变换;(4)选取系数子带;(5)选取正方形邻域图像块;(6)提取像素的局部纹理特征;(7)获得三维图像矩阵;(8)选择训练样例;(9)构建栈式自编码器SAE;(10)进行非线性变换操作;(11)微调模型中的参数;(12)输出高光谱图像的分类结果。本发明可以充分地利用高光谱图像的局部纹理特征,具有很高的分类准确率,可用于地质勘探领域中的高光谱图像的分类,为地物图像的绘制提供参考。

基于Gauss分布的自适应阈值高光谱图像分类研究的开题报告.docx
基于Gauss分布的自适应阈值高光谱图像分类研究的开题报告一、研究背景与意义高光谱遥感技术能够获取地表物体的高精度光谱信息,具有较高的分类精度和信息丰富度,近年来被广泛应用于地物分类、植被覆盖度估算、环境监测等领域,因此对高光谱图像分类算法的研究具有重要的理论和现实意义。其中,阈值分类是高光谱图像分类中最为简单、直接的一种方法,但是阈值的确定会直接影响分类的准确率。传统的阈值分类方法常常基于固定的阈值,无法适应高光谱图像中不同类别的光谱分布特征,导致分类结果不佳。因此,通过研究基于Gauss分布的自适应阈