
基于分数阶傅里叶变换的激光雷达微弱信号提取和分解方法.pdf

秀华****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于分数阶傅里叶变换的激光雷达微弱信号提取和分解方法.pdf
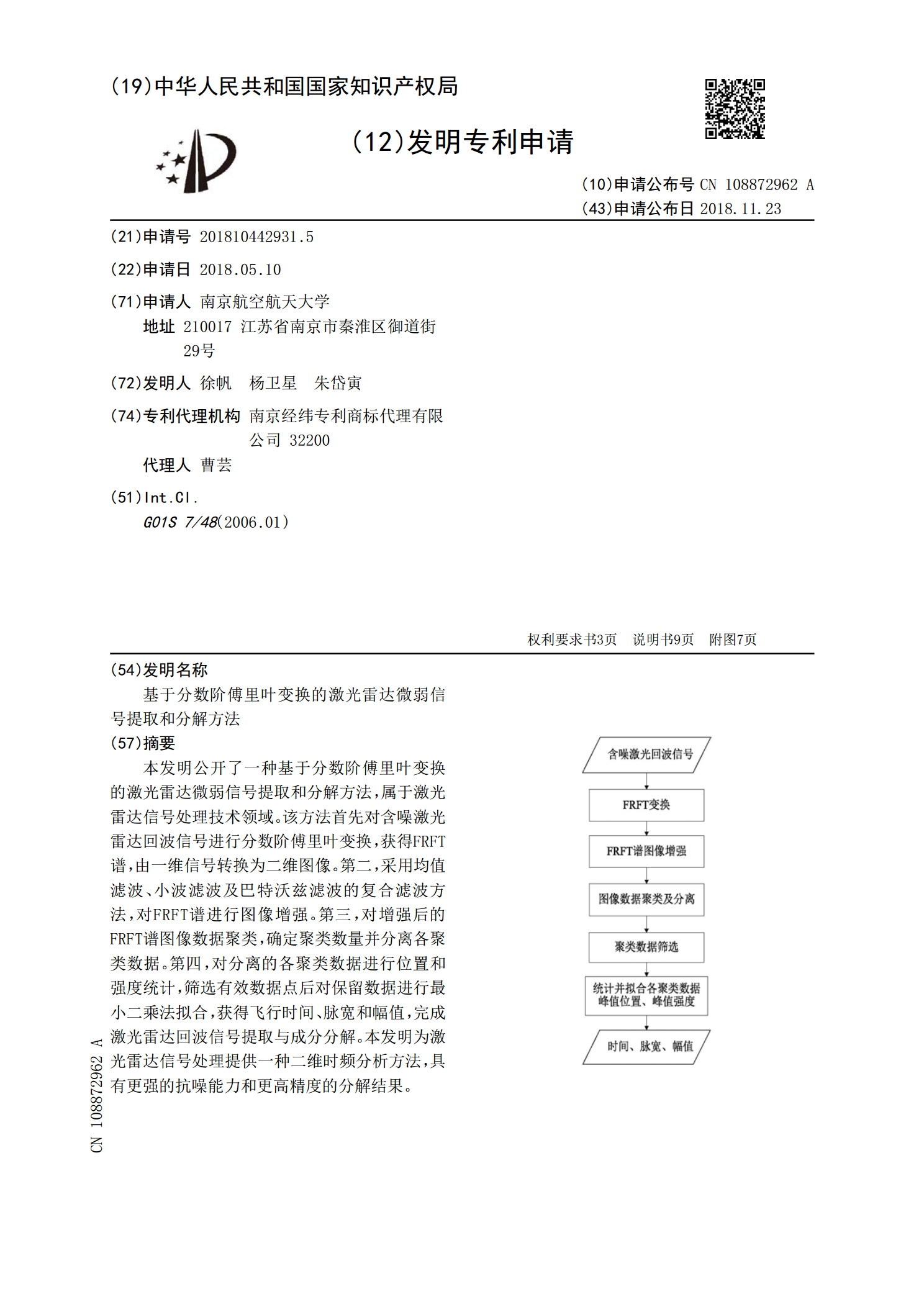
本发明公开了一种基于分数阶傅里叶变换的激光雷达微弱信号提取和分解方法,属于激光雷达信号处理技术领域。该方法首先对含噪激光雷达回波信号进行分数阶傅里叶变换,获得FRFT谱,由一维信号转换为二维图像。第二,采用均值滤波、小波滤波及巴特沃兹滤波的复合滤波方法,对FRFT谱进行图像增强。第三,对增强后的FRFT谱图像数据聚类,确定聚类数量并分离各聚类数据。第四,对分离的各聚类数据进行位置和强度统计,筛选有效数据点后对保留数据进行最小二乘法拟合,获得飞行时间、脉宽和幅值,完成激光雷达回波信号提取与成分分解。本发明为

基于分数阶傅里叶变换的目标特征提取方法.pdf
本发明公开了一种基于分数阶傅里叶变换理论的特征提取方法,主要解决现有技术在对三类飞机目标分类过程的特征提取中特征单一且分类效果不理想的问题。其技术方案是:1、对训练信号做分数阶傅里叶变换;2、对变换后的训练信号提取特征;3、对提取出的特征进行特征选择;4、用选出特征对分类器进行训练;5、对测试信号做分数阶傅里叶变换;6、对变换后测试信号提取步骤3中所选出特征;7、把从测试信号中提取的特征送入到训练好的分类器中,完成对三类飞机目标的分类。本发明将传统的时域和多普勒域特征扩展到分数域,能够更好地描述目标回波特
微弱信号盲提取方法.pdf
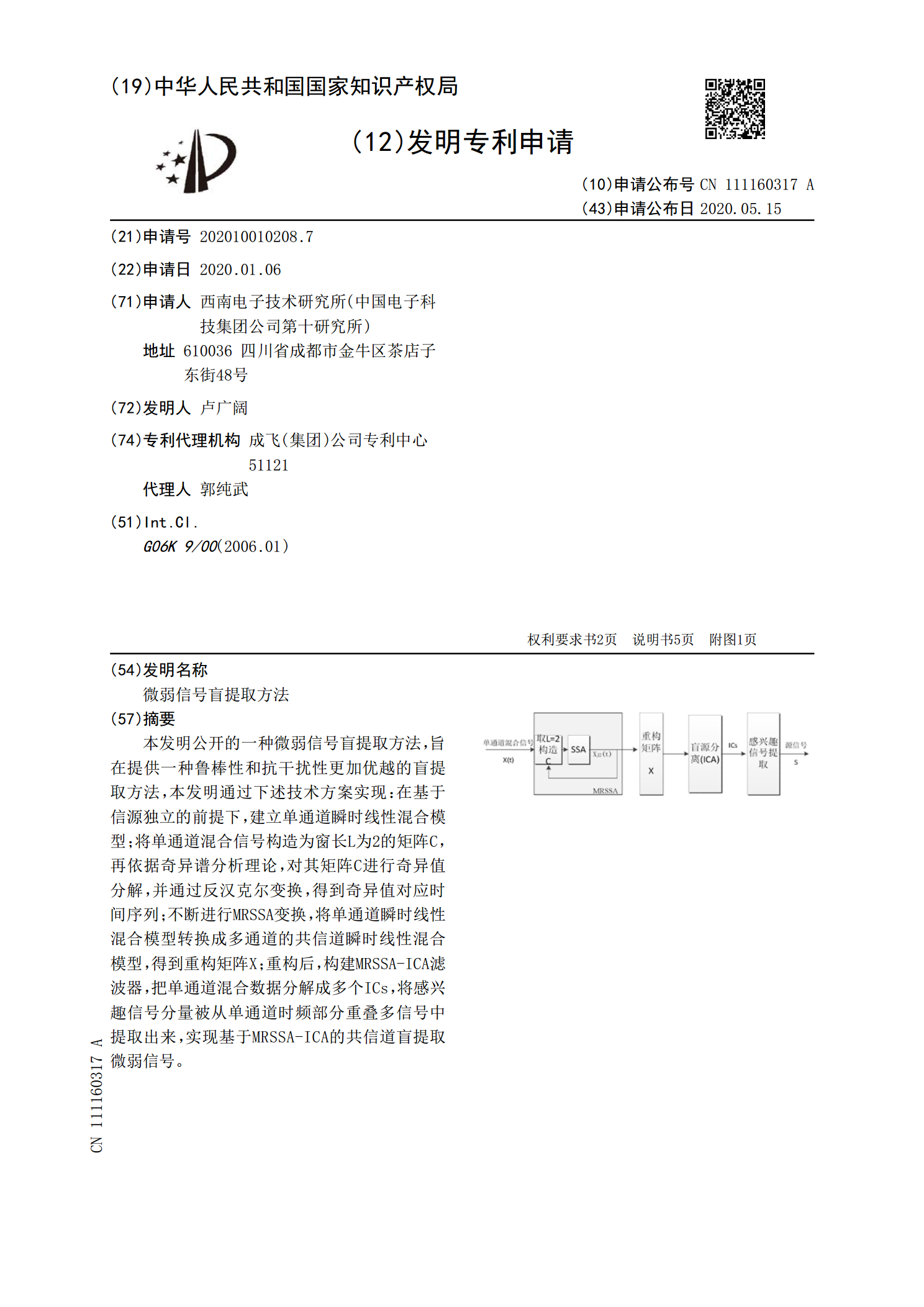
本发明公开的一种微弱信号盲提取方法,旨在提供一种鲁棒性和抗干扰性更加优越的盲提取方法,本发明通过下述技术方案实现:在基于信源独立的前提下,建立单通道瞬时线性混合模型;将单通道混合信号构造为窗长L为2的矩阵C,再依据奇异谱分析理论,对其矩阵C进行奇异值分解,并通过反汉克尔变换,得到奇异值对应时间序列;不断进行MRSSA变换,将单通道瞬时线性混合模型转换成多通道的共信道瞬时线性混合模型,得到重构矩阵X;重构后,构建MRSSA‑ICA滤波器,把单通道混合数据分解成多个ICs,将感兴趣信号分量被从单通道时频部分重
基于分数阶傅里叶变换的早期胃癌目标特征提取系统.pdf
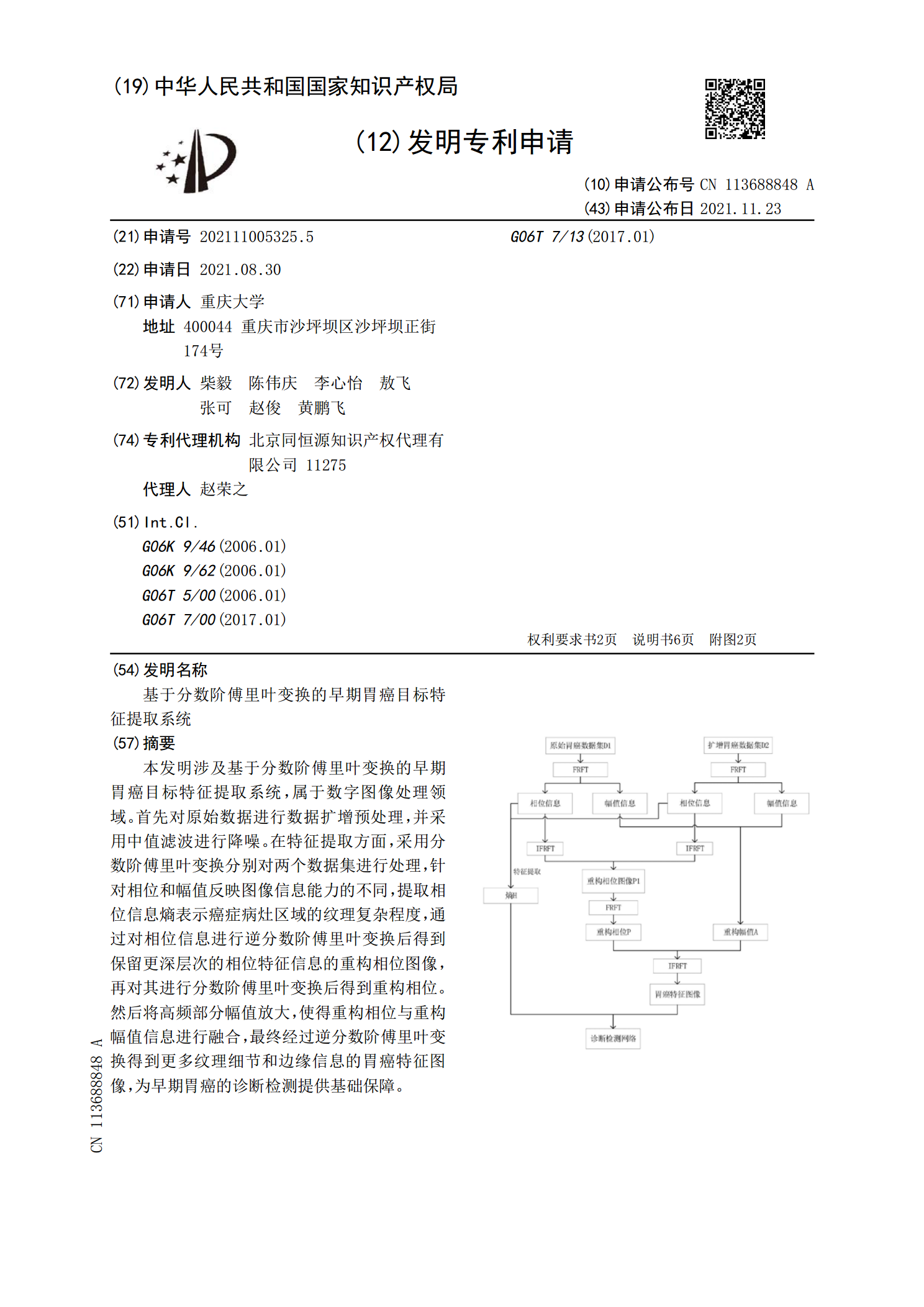
本发明涉及基于分数阶傅里叶变换的早期胃癌目标特征提取系统,属于数字图像处理领域。首先对原始数据进行数据扩增预处理,并采用中值滤波进行降噪。在特征提取方面,采用分数阶傅里叶变换分别对两个数据集进行处理,针对相位和幅值反映图像信息能力的不同,提取相位信息熵表示癌症病灶区域的纹理复杂程度,通过对相位信息进行逆分数阶傅里叶变换后得到保留更深层次的相位特征信息的重构相位图像,再对其进行分数阶傅里叶变换后得到重构相位。然后将高频部分幅值放大,使得重构相位与重构幅值信息进行融合,最终经过逆分数阶傅里叶变换得到更多纹理细

基于分数阶傅里叶变换的语音非语音检测方法.pdf
本发明公开了语音信号处理领域的一种基于分数阶傅里叶变换的语音非语音检测方法。其技术方案是,首先对音频信号分帧,然后进行零均值化和加窗处理,接着对每帧信号进行不同阶次的分数阶傅里叶变换,得到其分数阶频谱,然后计算分数阶频谱熵,选择各个阶次中最大的分数阶频谱熵,与阈值进行比较即可得到判决结果。该方法处理方法统一,流程简单,可以有效提高提高语音非语音检测的性能;可以实现音频信号中静音、噪音、音乐等“垃圾”信号的有效过滤。