
基于线阵相机的路面图像灰度校正方法.pdf

努力****亚捷


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于线阵相机的路面图像灰度校正方法.pdf
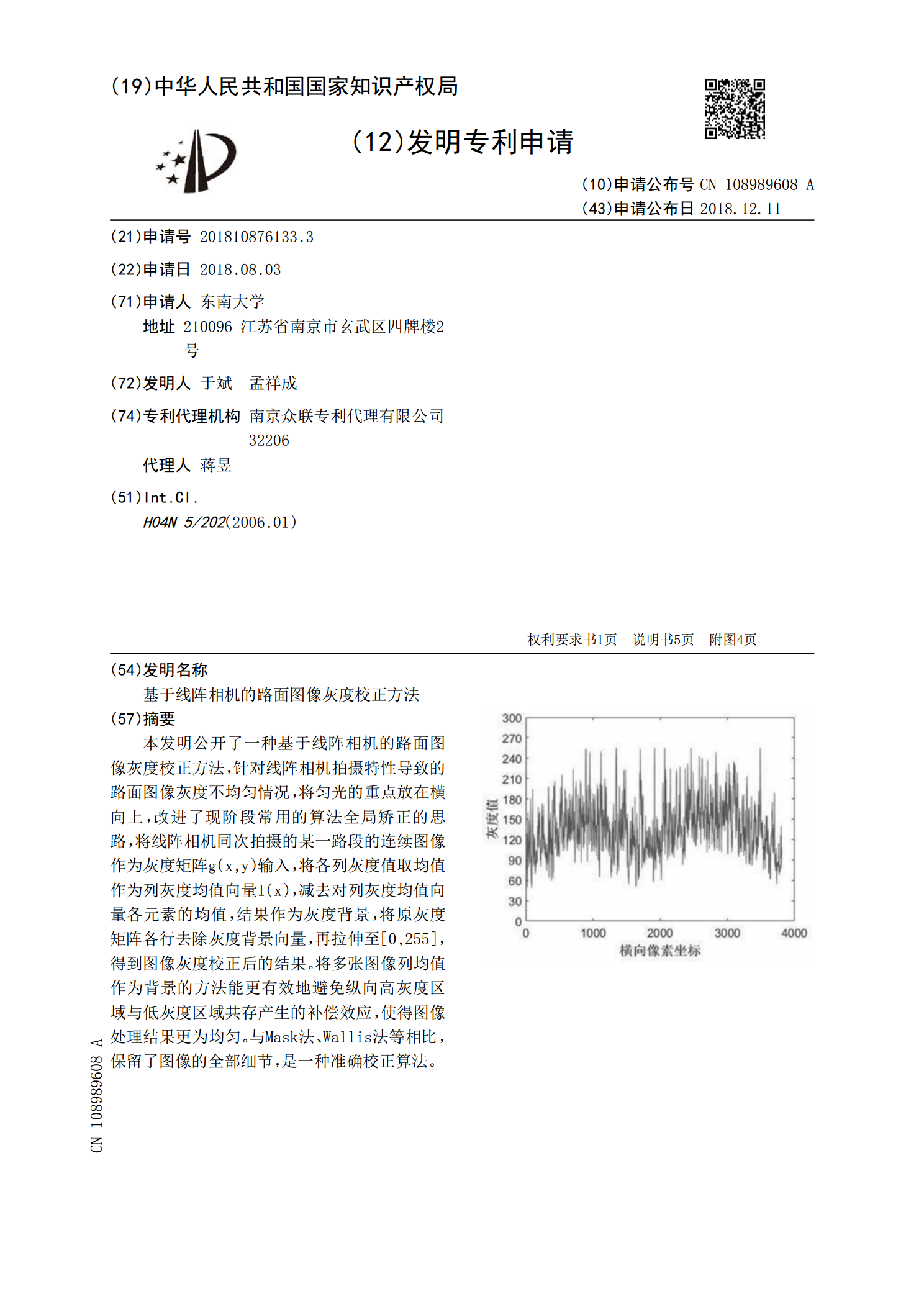
本发明公开了一种基于线阵相机的路面图像灰度校正方法,针对线阵相机拍摄特性导致的路面图像灰度不均匀情况,将匀光的重点放在横向上,改进了现阶段常用的算法全局矫正的思路,将线阵相机同次拍摄的某一路段的连续图像作为灰度矩阵g(x,y)输入,将各列灰度值取均值作为列灰度均值向量I(x),减去对列灰度均值向量各元素的均值,结果作为灰度背景,将原灰度矩阵各行去除灰度背景向量,再拉伸至[0,255],得到图像灰度校正后的结果。将多张图像列均值作为背景的方法能更有效地避免纵向高灰度区域与低灰度区域共存产生的补偿效应,使得图
一种线阵相机的扫描图像校正方法及终端.pdf
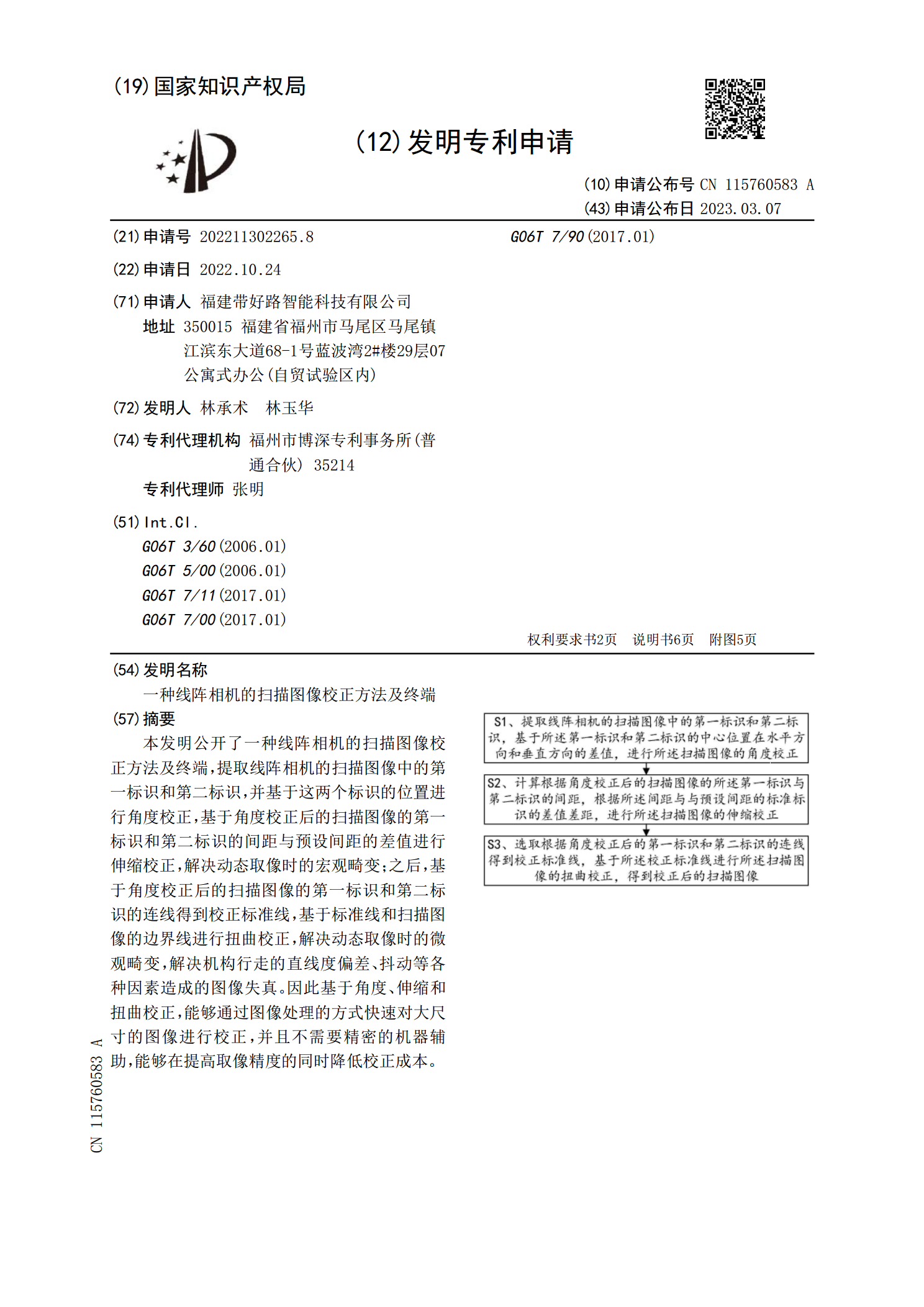
本发明公开了一种线阵相机的扫描图像校正方法及终端,提取线阵相机的扫描图像中的第一标识和第二标识,并基于这两个标识的位置进行角度校正,基于角度校正后的扫描图像的第一标识和第二标识的间距与预设间距的差值进行伸缩校正,解决动态取像时的宏观畸变;之后,基于角度校正后的扫描图像的第一标识和第二标识的连线得到校正标准线,基于标准线和扫描图像的边界线进行扭曲校正,解决动态取像时的微观畸变,解决机构行走的直线度偏差、抖动等各种因素造成的图像失真。因此基于角度、伸缩和扭曲校正,能够通过图像处理的方式快速对大尺寸的图像进行校
线阵相机标定方法.pdf
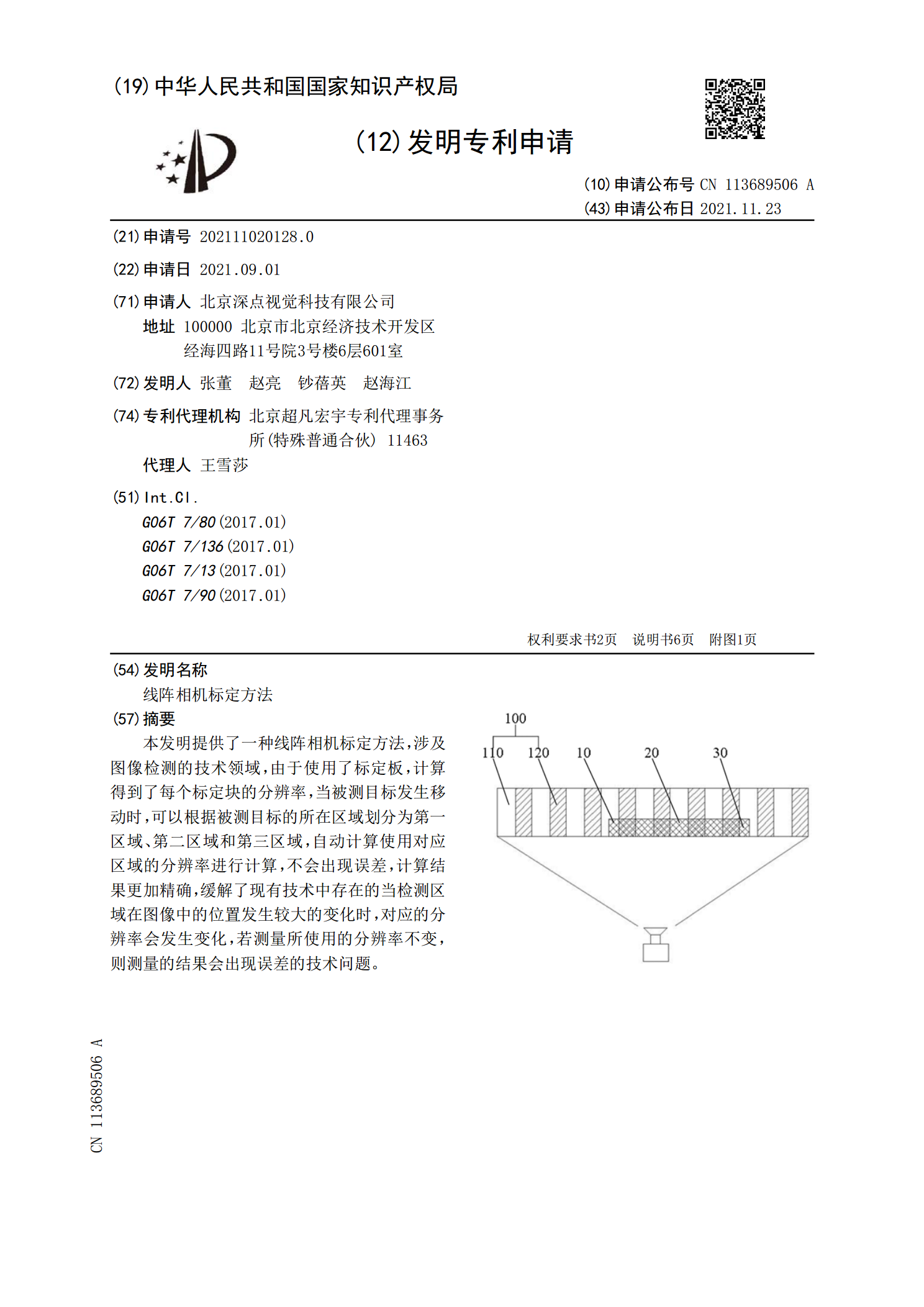
本发明提供了一种线阵相机标定方法,涉及图像检测的技术领域,由于使用了标定板,计算得到了每个标定块的分辨率,当被测目标发生移动时,可以根据被测目标的所在区域划分为第一区域、第二区域和第三区域,自动计算使用对应区域的分辨率进行计算,不会出现误差,计算结果更加精确,缓解了现有技术中存在的当检测区域在图像中的位置发生较大的变化时,对应的分辨率会发生变化,若测量所使用的分辨率不变,则测量的结果会出现误差的技术问题。

基于SIFT匹配的立体图像彩色转灰度校正方法.pdf
本发明公开了基于SIFT匹配的立体图像彩色转灰度校正方法,包括以下步骤:步骤一:输入彩色图像,为左右视图分别定义一个彩色转灰度的全局映射函数;步骤二:基于SIFT特征点的匹配算法,首先检测出左右视图中的特征点,然后将两个视图之间的特征点进行匹配;步骤三:定义特征保留项,亮度一致项以及规范化项并根据定义的特征保留项,亮度一致项以及规范化项构建能量方程;步骤四:使用标准线性求解器,在线性时间内求出该能量方程的最优解,该最优解为步骤一中所定义的全局映射函数的未知参数,输出灰色图像。将彩色转灰度问题转化为能量优化
超声医学图像灰度校正方法的改进.pdf
一研究论著超声医学图像灰度校正方法的改进