
一种基于低尺度血管检测分割视网膜血管的方法.pdf

努力****承悦


1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于低尺度血管检测分割视网膜血管的方法.pdf
本发明属于图像识别和医学图像处理领域,涉及一种基于低尺度血管检测的视网膜血管分割方法。第一步:特征提取,本发明用到两个维度的特征矩阵,一个直接来自于彩色视网膜眼底图像的绿色通道。另一个是对用B‑COSFIRE滤波器处理后得到的响应结果。第二步,通过三倍标准差法去掉两个特征矩阵异常值,第三步,LVD模型的设计考虑到多尺度下的特征提取,以及每一层特征的融合,不仅能够从低尺度提取特征,而且保留了原尺度的细节特征。本发明的LVD模型融合了原尺度的细节特征,使得特征信息不丢失,分割结果更准确;子网络ADS‑N有较深

基于多尺度注意力网络的视网膜血管分割算法的开题报告.docx
基于多尺度注意力网络的视网膜血管分割算法的开题报告题目:基于多尺度注意力网络的视网膜血管分割算法一、研究背景随着人们生活水平的不断提高,眼疾成为世界各国的一种主要疾病之一。而视网膜血管异常是许多眼疾的重要特征之一,如糖尿病视网膜病变、视网膜静脉阻塞等。因此,对于视网膜血管的准确分割非常重要,可以帮助医生诊断眼疾并选择合适的治疗方法。传统的视网膜血管分割算法主要基于图像处理和机器学习技术,分为两个步骤:预处理和分割。预处理包括图像增强、噪声滤波等;而分割则采用经典的图像分割算法,如阈值分割、边缘分割、区域分

基于特征识别的视网膜血管分割方法研究的中期报告.docx
基于特征识别的视网膜血管分割方法研究的中期报告一、前言视网膜血管分割是数字图像处理领域中的重要问题。视网膜血管分割可以用于多种医学应用,如糖尿病视网膜病变的自动筛查、青光眼的早期诊断等。因此,对于视网膜血管分割的研究具有重要的意义。传统的人工分割方法需要经过长时间的训练才能获得较好的效果。近年来,基于机器学习的自动分割方法逐渐受到了关注。此外,基于特征识别的分割方法是另一种有效的分割方法。本研究旨在探究基于特征识别的视网膜血管分割方法。二、研究背景视网膜血管分割是数字图像处理领域的一个基本问题。许多疾病,
一种基于深度学习自适应权重的视网膜血管分割方法.pdf
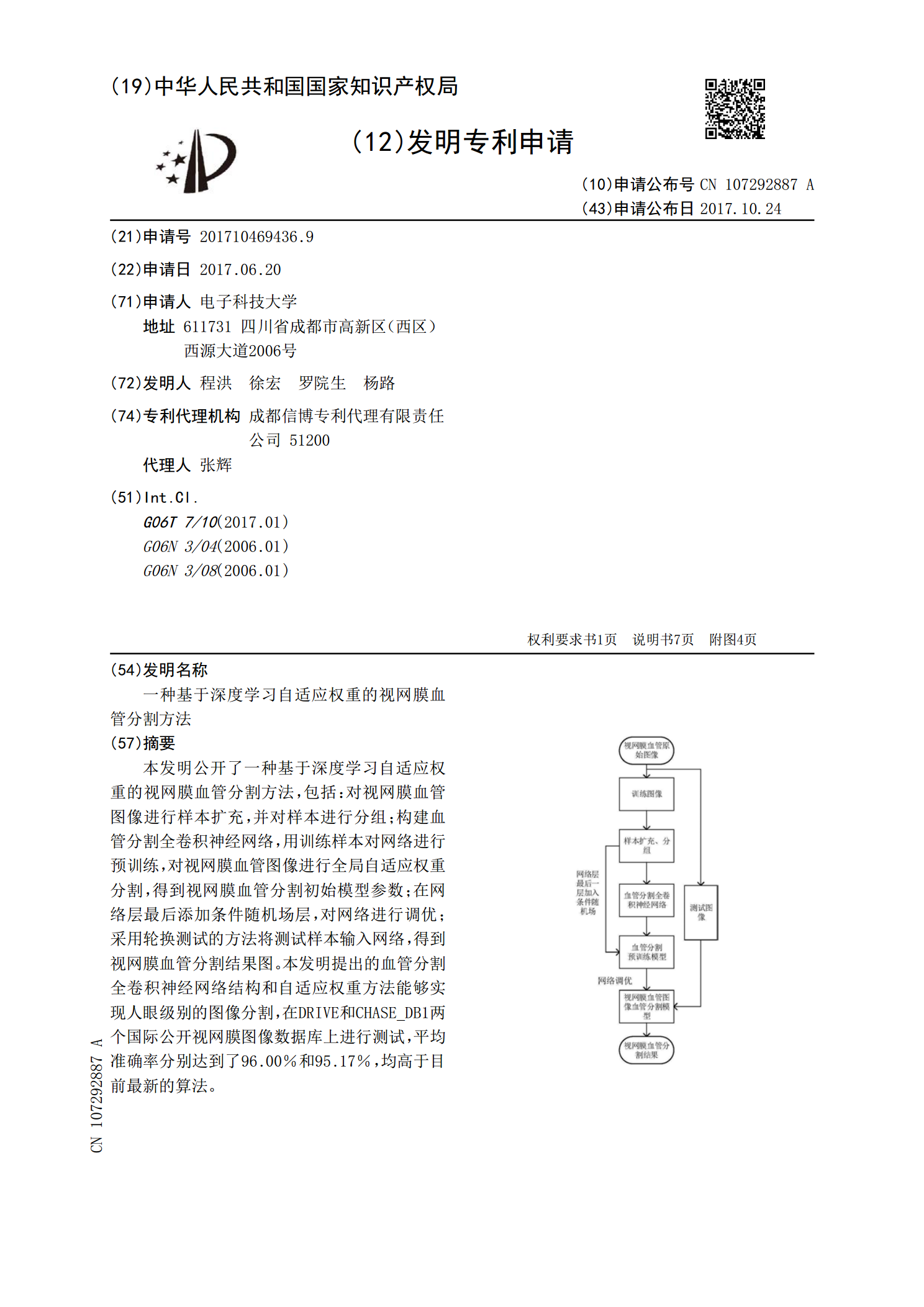
本发明公开了一种基于深度学习自适应权重的视网膜血管分割方法,包括:对视网膜血管图像进行样本扩充,并对样本进行分组;构建血管分割全卷积神经网络,用训练样本对网络进行预训练,对视网膜血管图像进行全局自适应权重分割,得到视网膜血管分割初始模型参数;在网络层最后添加条件随机场层,对网络进行调优;采用轮换测试的方法将测试样本输入网络,得到视网膜血管分割结果图。本发明提出的血管分割全卷积神经网络结构和自适应权重方法能够实现人眼级别的图像分割,在DRIVE和CHASE_DB1两个国际公开视网膜图像数据库上进行测试,平均

一种基于注意力机制的轻量化视网膜血管分割方法.pdf
本发明公开了一种基于注意力机制的轻量化视网膜血管分割方法,首先对原视网膜血管图像进行预处理,基于U‑Net和全卷积网络构建视网膜血管分割模型,所述视网膜血管分割模型包括前级网络、后级网络、编解码块、空间分组增强模块;将增强视网膜血管图像输入至前级网络获取初始特征图;对初始特征图采样、输出得到完整特征图,对完整特征图卷积、通道拼接操作,输入至后级网络,得到视网膜血管分割图,通过优化U‑Net网络结构,引入注意力机制,在提升分割性能的同时降低网络复杂度,重点解决了视网膜血管分割领域中无法有效平衡网络复杂度以及