
基于EMD-MPF改进的陀螺仪信号去噪方法.pdf

雅云****彩妍

1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于EMD-MPF改进的陀螺仪信号去噪方法.pdf
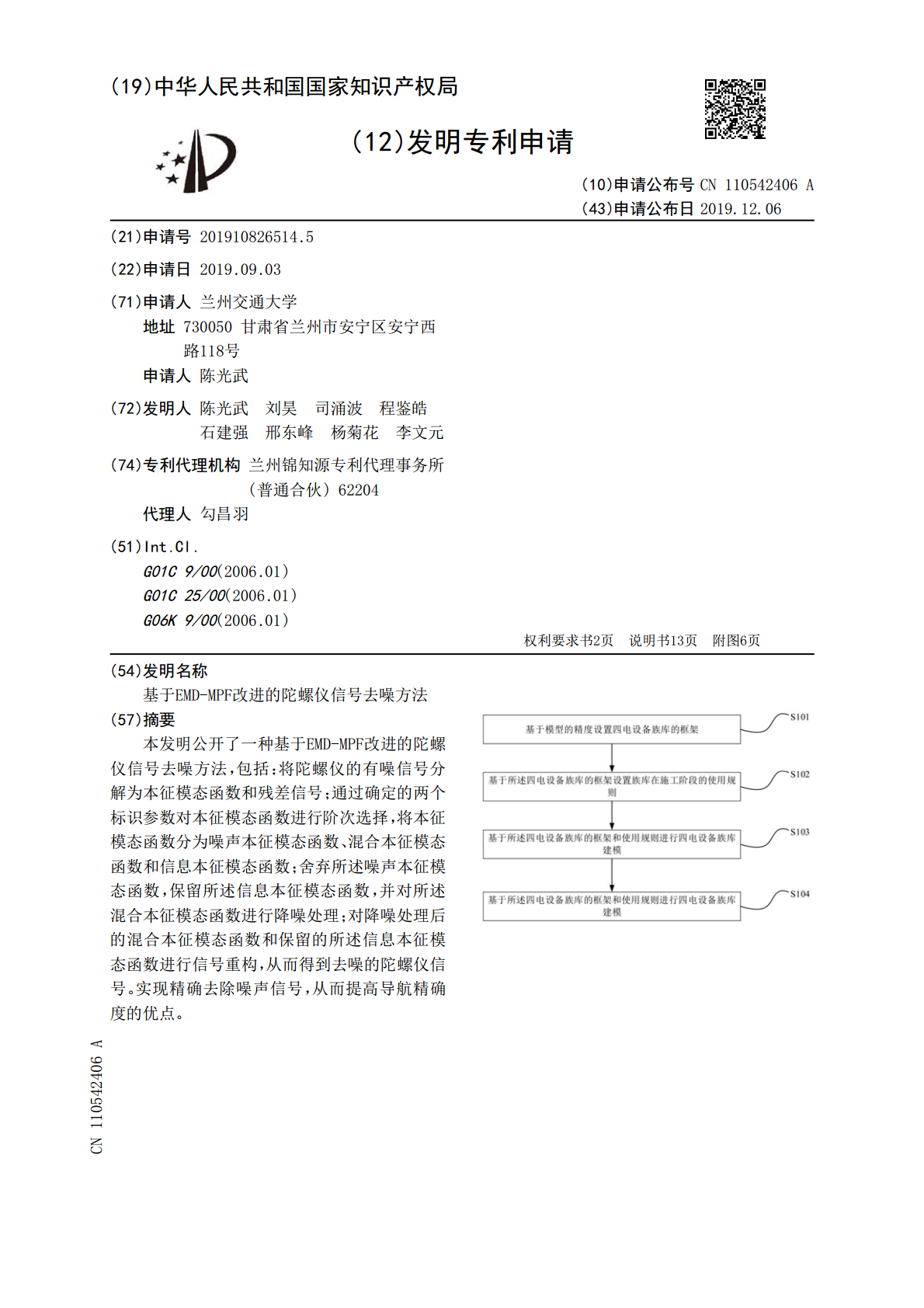
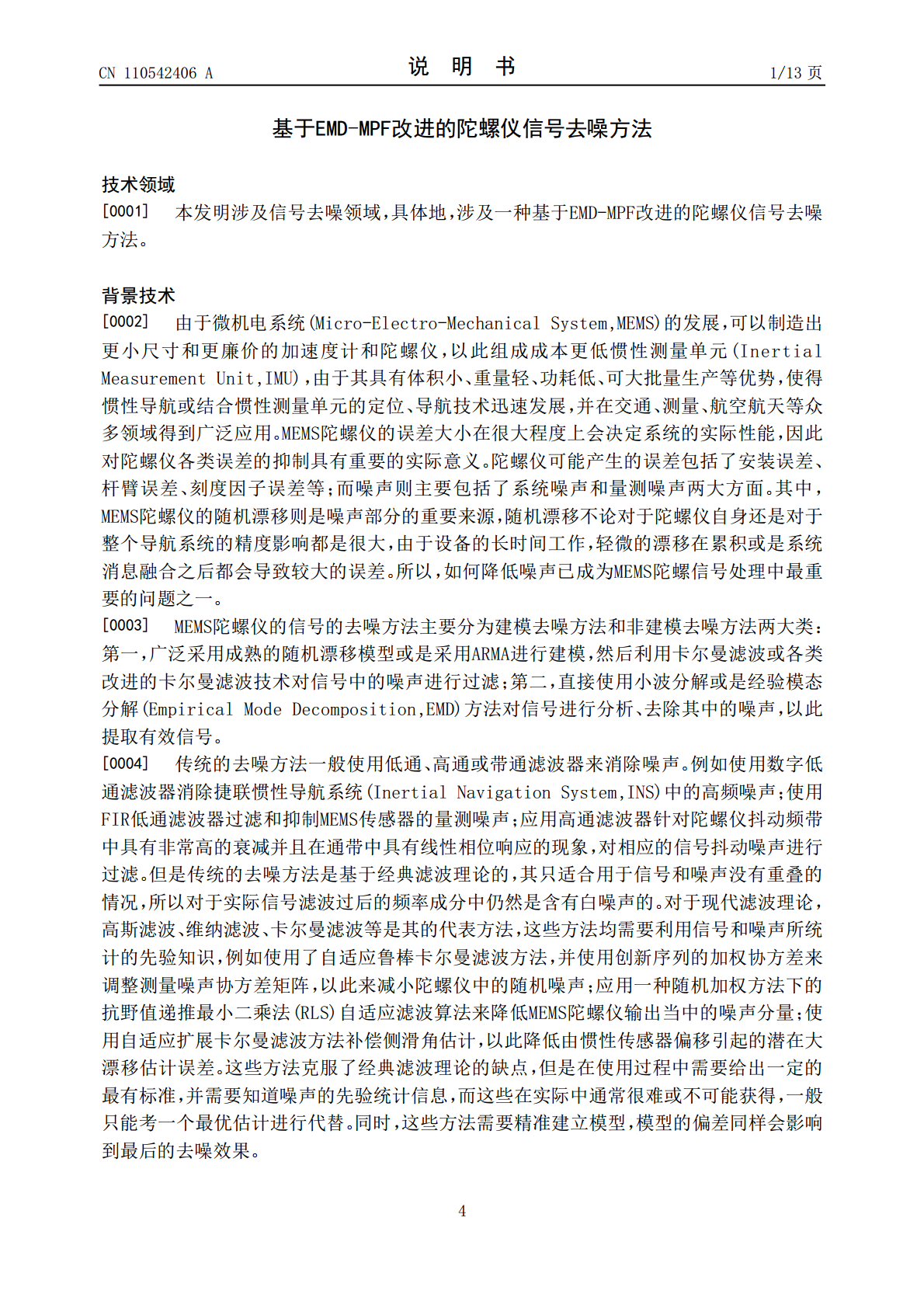
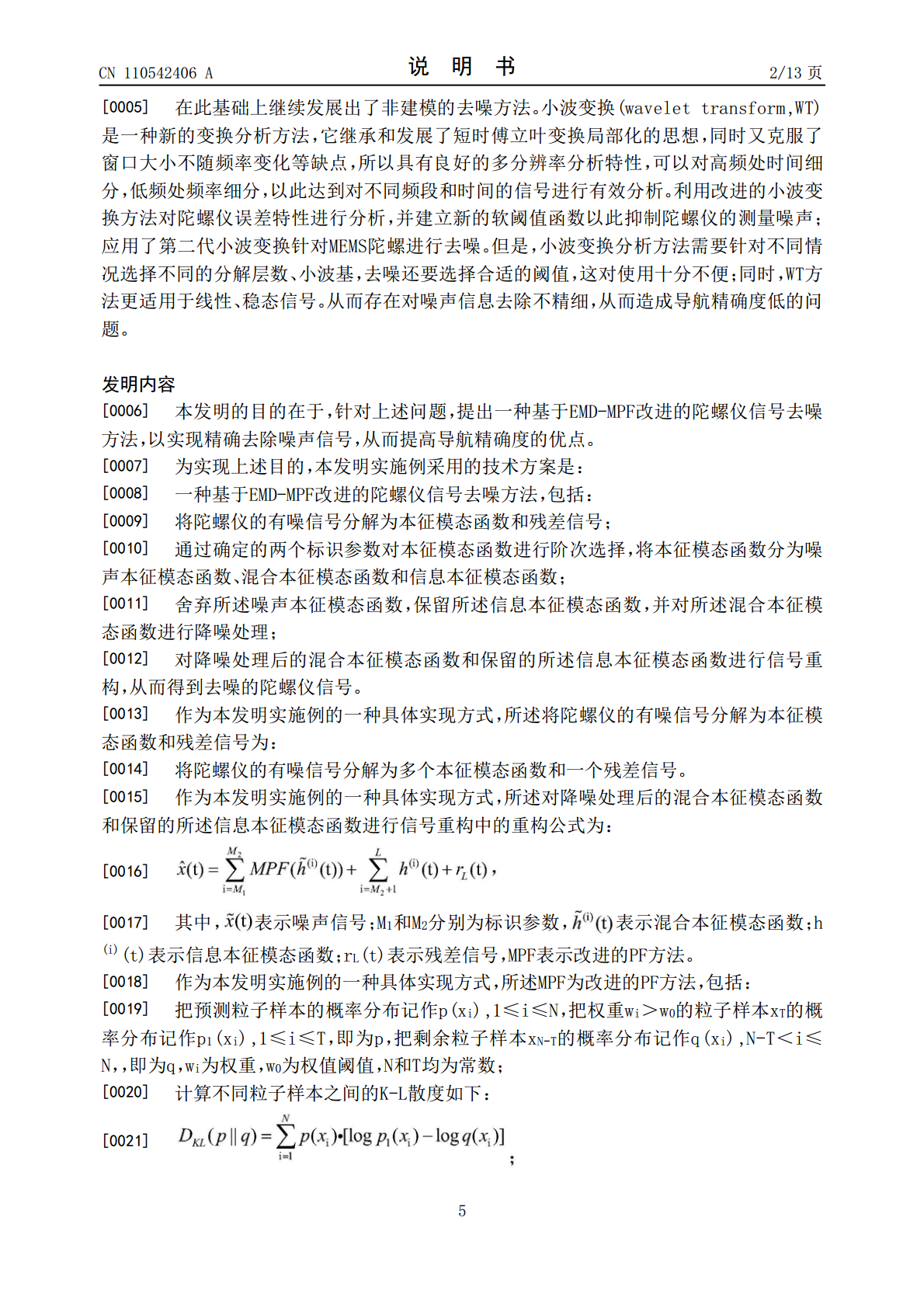
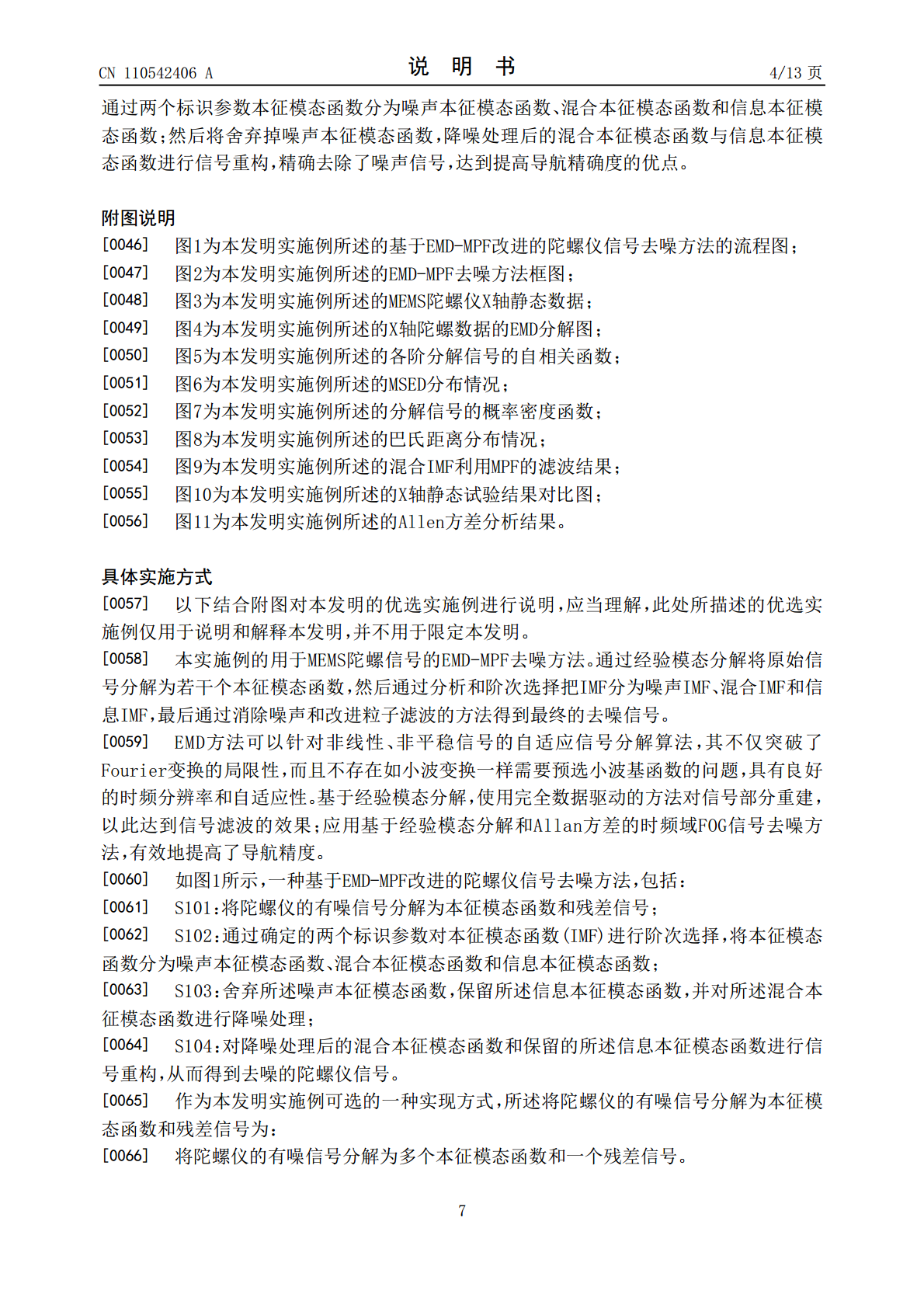
本发明公开了一种基于EMD‑MPF改进的陀螺仪信号去噪方法,包括:将陀螺仪的有噪信号分解为本征模态函数和残差信号;通过确定的两个标识参数对本征模态函数进行阶次选择,将本征模态函数分为噪声本征模态函数、混合本征模态函数和信息本征模态函数;舍弃所述噪声本征模态函数,保留所述信息本征模态函数,并对所述混合本征模态函数进行降噪处理;对降噪处理后的混合本征模态函数和保留的所述信息本征模态函数进行信号重构,从而得到去噪的陀螺仪信号。实现精确去除噪声信号,从而提高导航精确度的优点。
基于改进BCA盲源分离的信号分离和去噪方法.pdf
本发明公开了一种基于改进BCA盲源分离的信号分离和去噪方法,用于分离混合声信号。本发明首先将接收到的几路叠加高斯噪声后的源信号通过短时傅里叶变化到频域;然后使用改进的迭代步长次梯度搜索算法基于BCA框架求解最优分离矩阵,利用最小失真原则和归一化原则对分离矩阵处理用于分离频域的混合信号,并基于频谱的相关性进行频谱排序;最后通过反傅里叶变换将信号恢复到时域。本发明能有效分离噪声环境下的信号,不仅可以分离独立信号,还可以分离相关信号;实现高斯去噪和信号分离的有效结合,提高水声信号接收质量和抗噪性能。
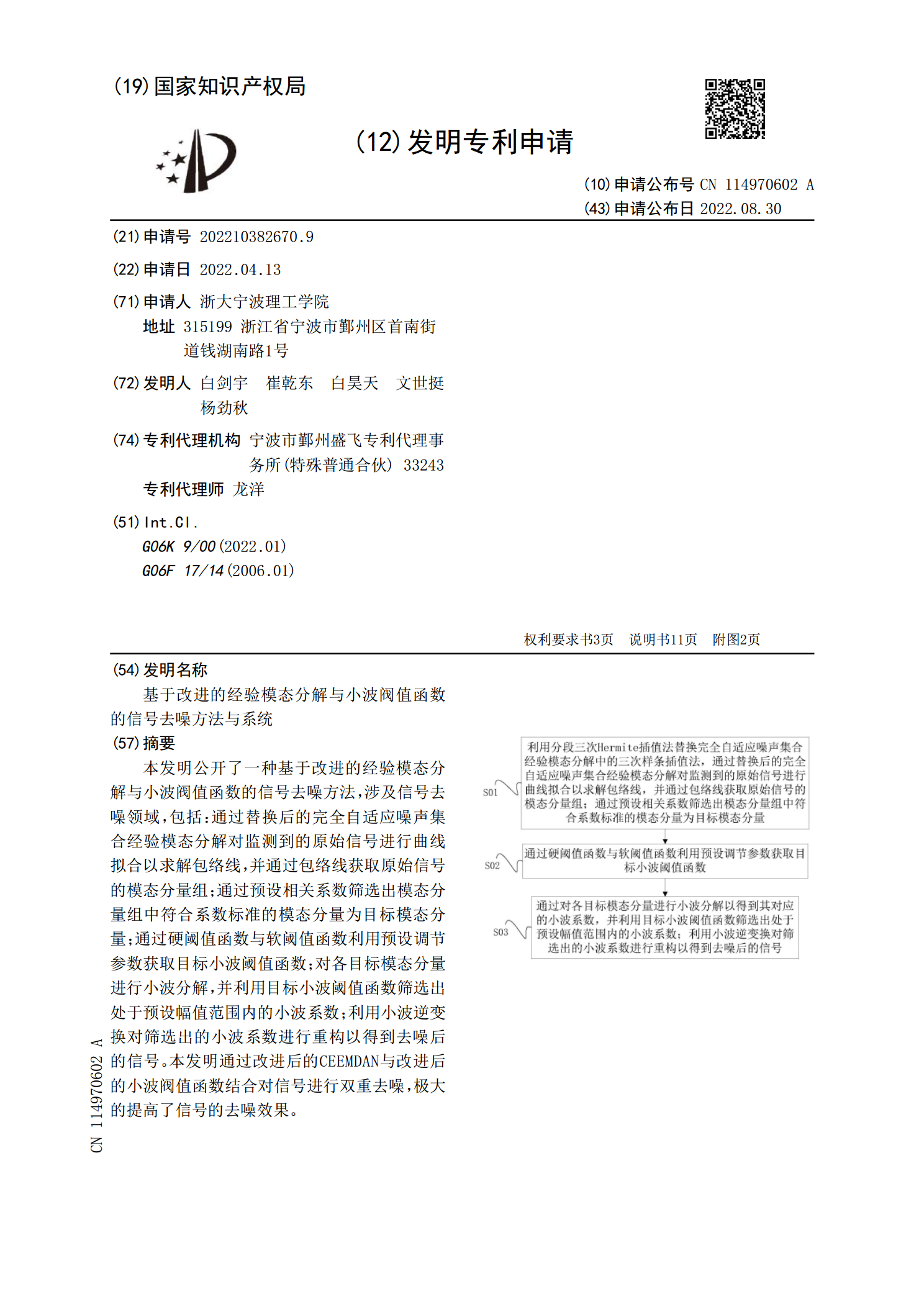
基于改进的经验模态分解与小波阀值函数的信号去噪方法与系统.pdf
本发明公开了一种基于改进的经验模态分解与小波阀值函数的信号去噪方法,涉及信号去噪领域,包括:通过替换后的完全自适应噪声集合经验模态分解对监测到的原始信号进行曲线拟合以求解包络线,并通过包络线获取原始信号的模态分量组;通过预设相关系数筛选出模态分量组中符合系数标准的模态分量为目标模态分量;通过硬阈值函数与软阈值函数利用预设调节参数获取目标小波阈值函数;对各目标模态分量进行小波分解,并利用目标小波阈值函数筛选出处于预设幅值范围内的小波系数;利用小波逆变换对筛选出的小波系数进行重构以得到去噪后的信号。本发明通过

基于改进FastICA算法的地震信号去噪研究的任务书.docx
基于改进FastICA算法的地震信号去噪研究的任务书任务书任务名称:基于改进FastICA算法的地震信号去噪研究任务背景:地震是一种自然灾害,它会破坏建筑物、损失财产和生命。地震信号的频谱非常宽,存在高频成分和低频成分,同时又被噪声所覆盖,严重影响地震信号的判读和分析。因此,地震信号的去噪是地震研究领域的热点问题。任务描述:本任务的目的是,利用改进的FastICA算法对地震信号进行去噪。该算法是传统ICA算法的变种,可以更好地处理具有非线性独立性的信号。任务中,我们将研究并改进FastICA算法,并将该算
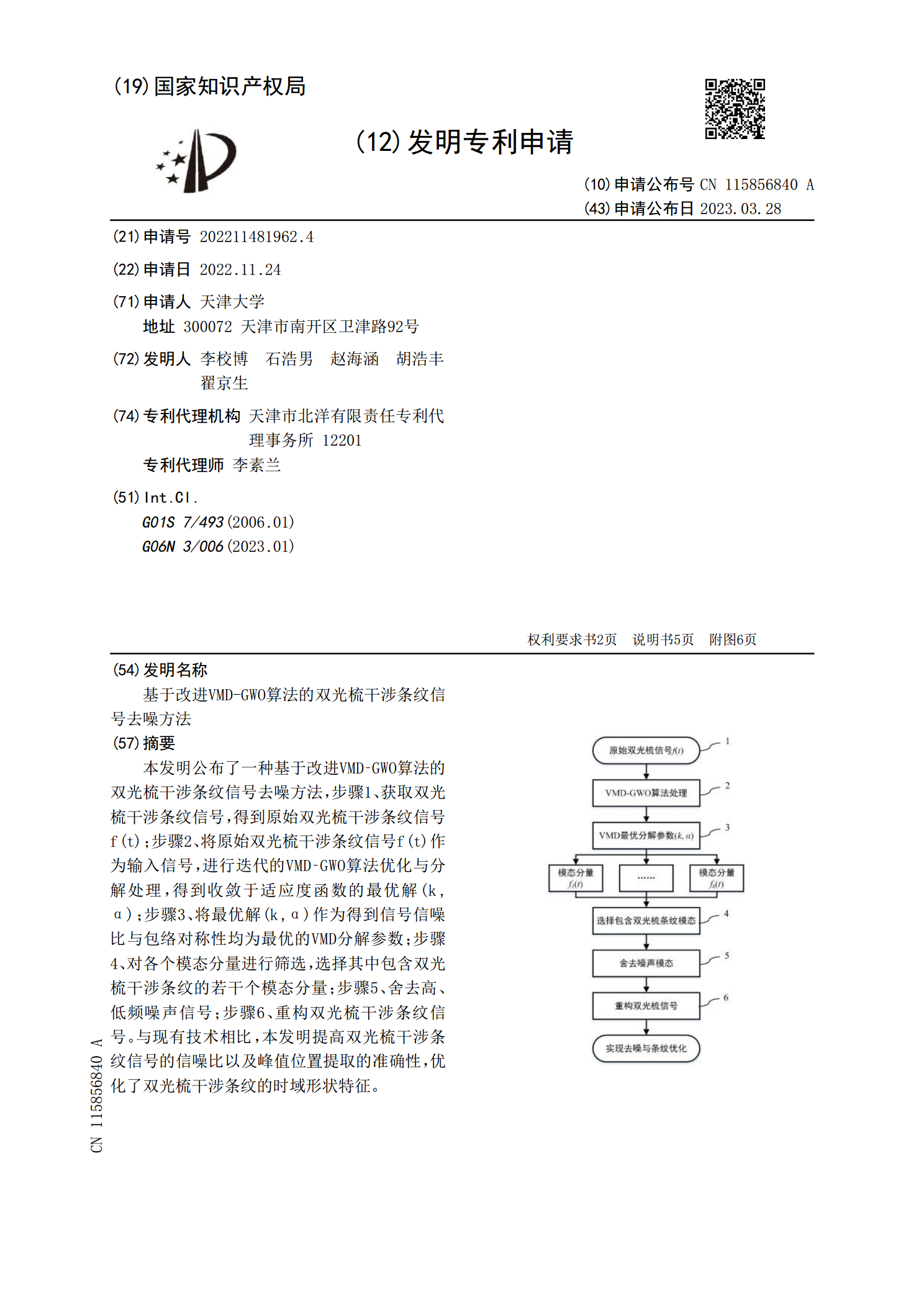
基于改进VMD-GWO算法的双光梳干涉条纹信号去噪方法.pdf
本发明公布了一种基于改进VMD‑GWO算法的双光梳干涉条纹信号去噪方法,步骤1、获取双光梳干涉条纹信号,得到原始双光梳干涉条纹信号f(t);步骤2、将原始双光梳干涉条纹信号f(t)作为输入信号,进行迭代的VMD‑GWO算法优化与分解处理,得到收敛于适应度函数的最优解(k,α);步骤3、将最优解(k,α)作为得到信号信噪比与包络对称性均为最优的VMD分解参数;步骤4、对各个模态分量进行筛选,选择其中包含双光梳干涉条纹的若干个模态分量;步骤5、舍去高、低频噪声信号;步骤6、重构双光梳干涉条纹信号。与现有技术相