
一种基于深度学习方法的消防通道障碍物智能检测方法.pdf

是你****岺呀


1/6

2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于深度学习方法的消防通道障碍物智能检测方法.pdf
本发明提供了一种基于深度学习方法的消防通道障碍物智能检测方法,步骤如下:取几段目标场景下的监控视频;对标注过的数据使用深度学习方法进行显著性目标检测模型训练;输入类似的场景下消防通道监控视频的一帧图像;使用训练好的模型对输入的图像进行预测;对前景物体计算最小外接矩形框;通过任意划区的坐标确定步骤四中图像的感兴趣区域;将感兴趣区域框分别与步骤六中的每个前景物体的最小外接矩形框计算交集与该前景物体的最小外接矩形框的比值P;比较p与预先设置的阈值V的大小,若p>V,则说明感兴趣区域内出现了障碍物;设置障碍
一种基于人工智能的障碍物检测方法.pdf
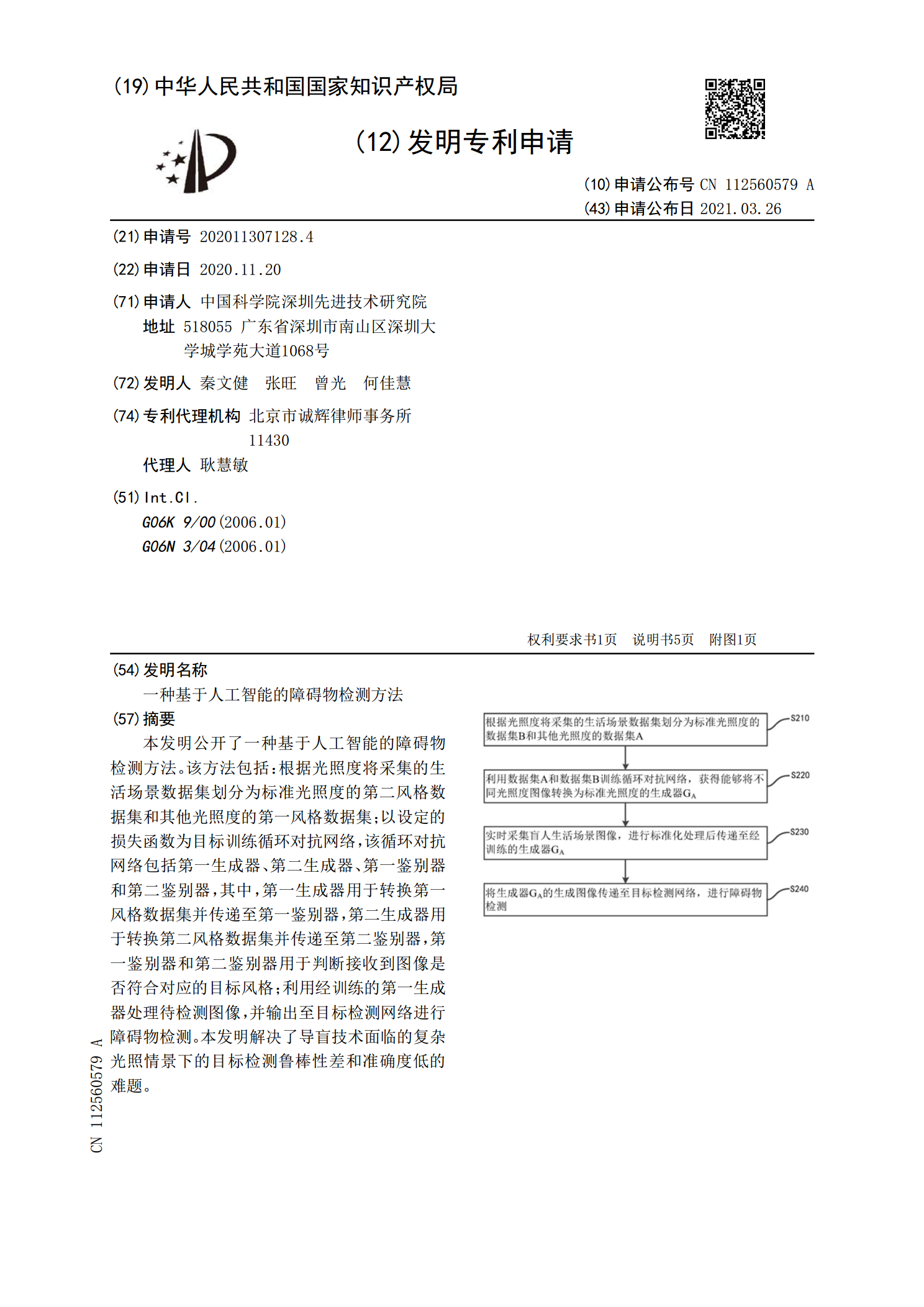
本发明公开了一种基于人工智能的障碍物检测方法。该方法包括:根据光照度将采集的生活场景数据集划分为标准光照度的第二风格数据集和其他光照度的第一风格数据集;以设定的损失函数为目标训练循环对抗网络,该循环对抗网络包括第一生成器、第二生成器、第一鉴别器和第二鉴别器,其中,第一生成器用于转换第一风格数据集并传递至第一鉴别器,第二生成器用于转换第二风格数据集并传递至第二鉴别器,第一鉴别器和第二鉴别器用于判断接收到图像是否符合对应的目标风格;利用经训练的第一生成器处理待检测图像,并输出至目标检测网络进行障碍物检测。本发
一种基于深度学习的道路环境障碍物检测系统及方法.pdf
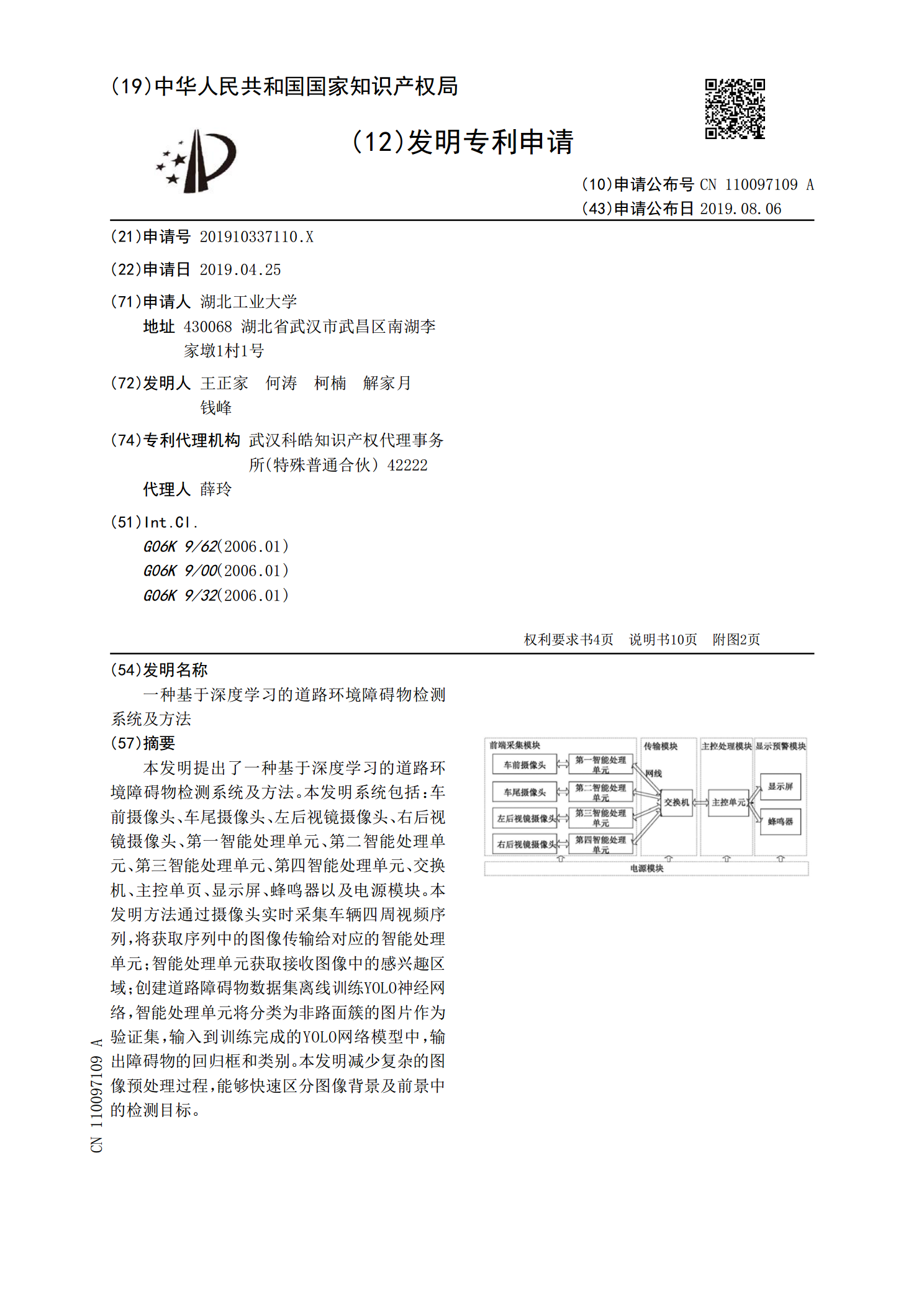
本发明提出了一种基于深度学习的道路环境障碍物检测系统及方法。本发明系统包括:车前摄像头、车尾摄像头、左后视镜摄像头、右后视镜摄像头、第一智能处理单元、第二智能处理单元、第三智能处理单元、第四智能处理单元、交换机、主控单页、显示屏、蜂鸣器以及电源模块。本发明方法通过摄像头实时采集车辆四周视频序列,将获取序列中的图像传输给对应的智能处理单元;智能处理单元获取接收图像中的感兴趣区域;创建道路障碍物数据集离线训练YOLO神经网络,智能处理单元将分类为非路面簇的图片作为验证集,输入到训练完成的YOLO网络模型中,输
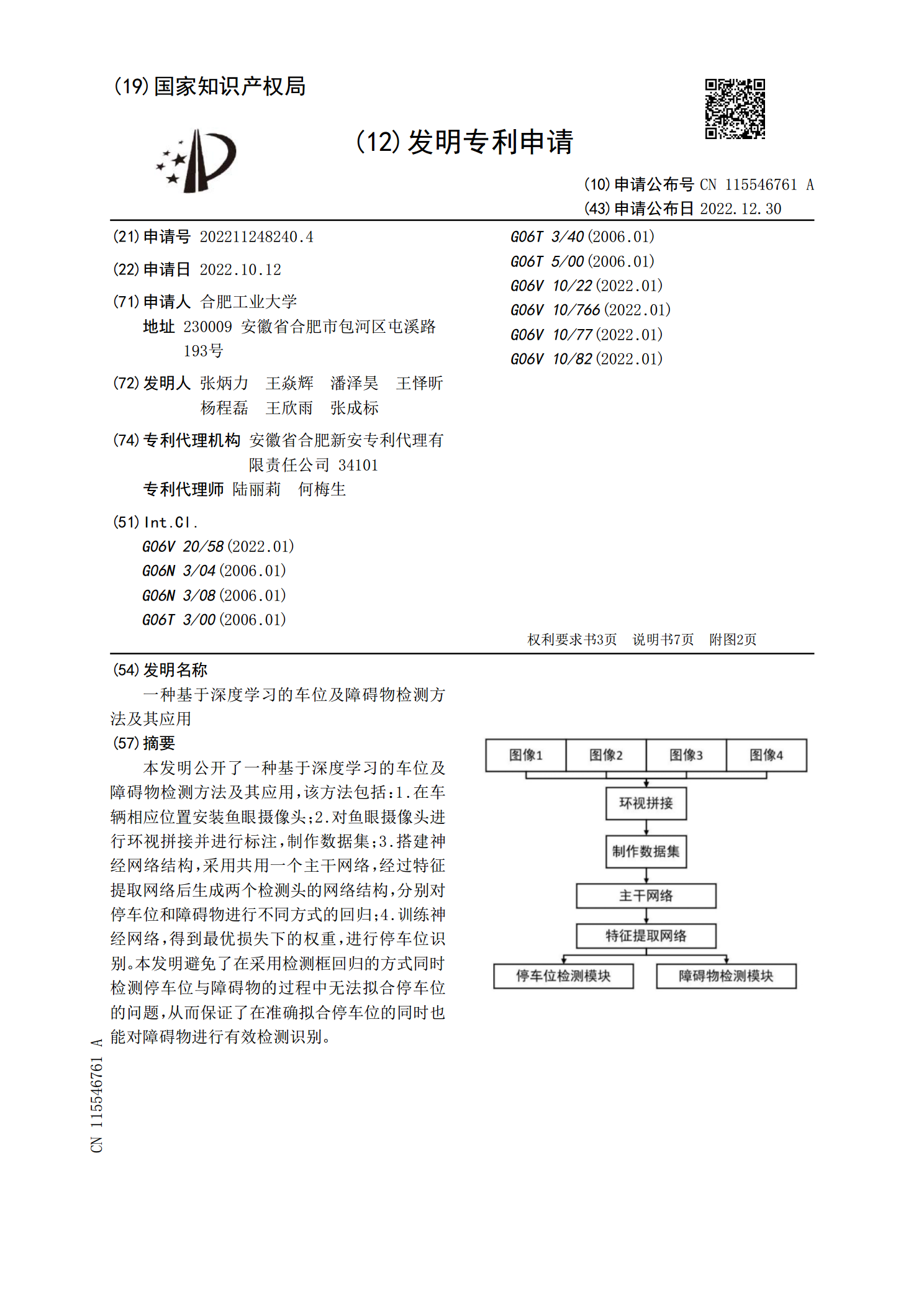
一种基于深度学习的车位及障碍物检测方法及其应用.pdf
本发明公开了一种基于深度学习的车位及障碍物检测方法及其应用,该方法包括:1.在车辆相应位置安装鱼眼摄像头;2.对鱼眼摄像头进行环视拼接并进行标注,制作数据集;3.搭建神经网络结构,采用共用一个主干网络,经过特征提取网络后生成两个检测头的网络结构,分别对停车位和障碍物进行不同方式的回归;4.训练神经网络,得到最优损失下的权重,进行停车位识别。本发明避免了在采用检测框回归的方式同时检测停车位与障碍物的过程中无法拟合停车位的问题,从而保证了在准确拟合停车位的同时也能对障碍物进行有效检测识别。
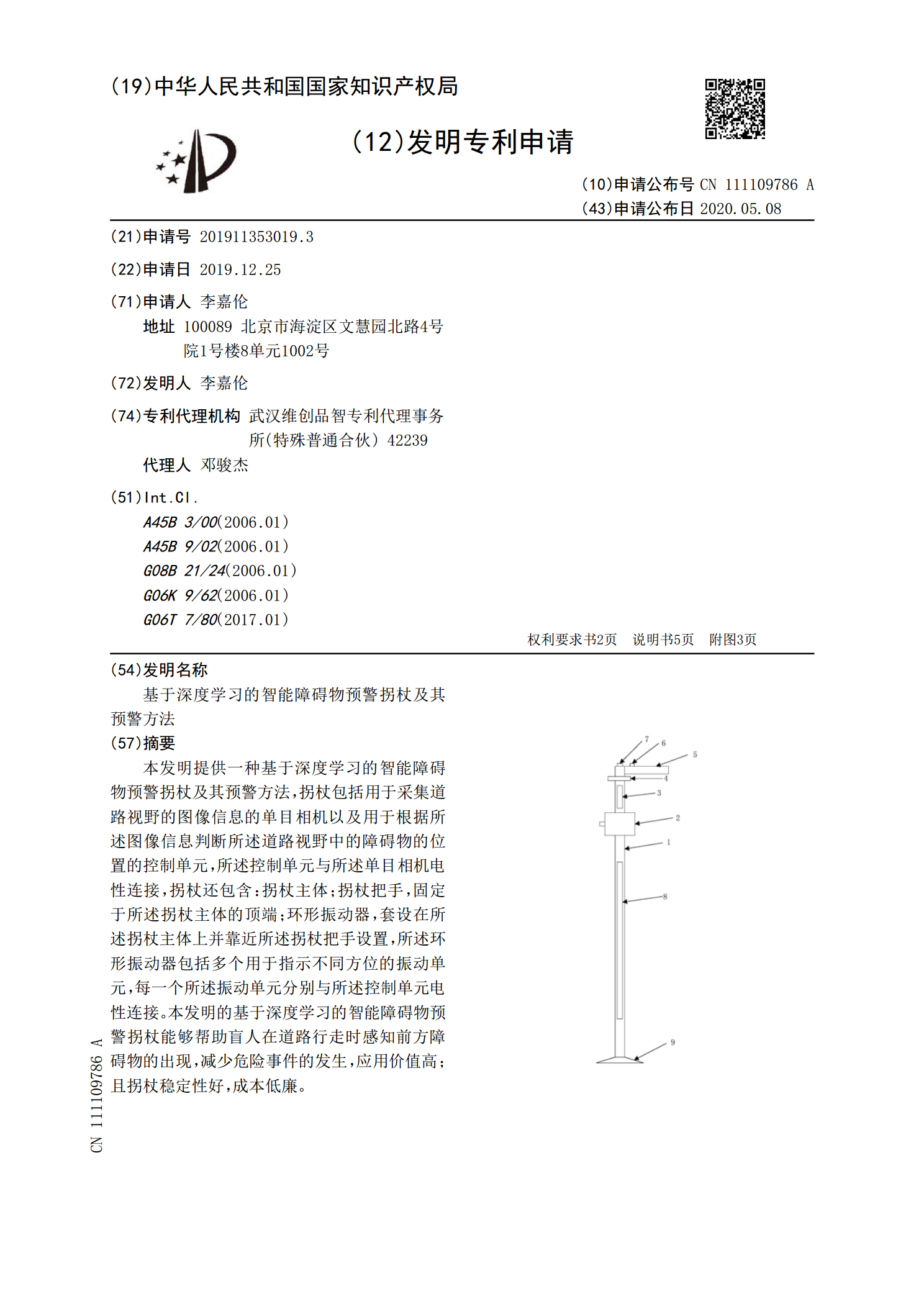
基于深度学习的智能障碍物预警拐杖及其预警方法.pdf
本发明提供一种基于深度学习的智能障碍物预警拐杖及其预警方法,拐杖包括用于采集道路视野的图像信息的单目相机以及用于根据所述图像信息判断所述道路视野中的障碍物的位置的控制单元,所述控制单元与所述单目相机电性连接,拐杖还包含:拐杖主体;拐杖把手,固定于所述拐杖主体的顶端;环形振动器,套设在所述拐杖主体上并靠近所述拐杖把手设置,所述环形振动器包括多个用于指示不同方位的振动单元,每一个所述振动单元分别与所述控制单元电性连接。本发明的基于深度学习的智能障碍物预警拐杖能够帮助盲人在道路行走时感知前方障碍物的出现,减少危