
基于轨迹数据挖掘的城市语义图谱构建方法.pdf

是你****盟主


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于轨迹数据挖掘的城市语义图谱构建方法.pdf
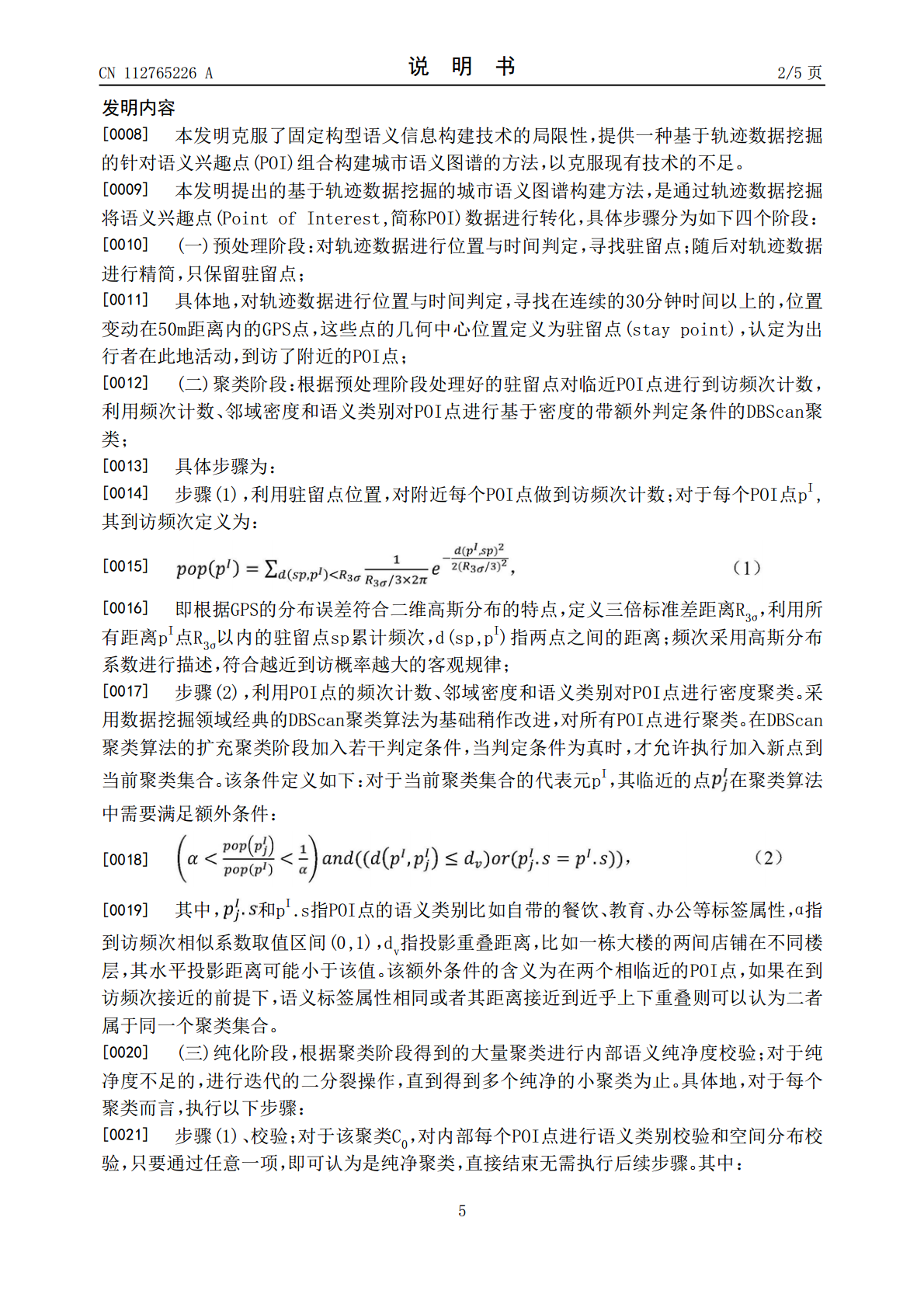
本发明属于轨迹计算技术领域,具体为一种基于轨迹数据挖掘的城市语义图谱构建方法。本发明包括:预处理:对轨迹数据进行位置与时间判定,寻找驻留点;聚类:根据预处理阶段处理好的驻留点对临近POI点进行到访频次计数,利用频次计数、邻域密度和语义类别对POI点进行聚类;纯化:进行聚类内部语义纯净度校验,纯净度不足的进行迭代分裂操作,直到得到多个纯净的小聚类为止;重组:对于纯化阶段产生的大量新聚类通过外部语义比较进行聚类合并。本发明高度融合并反映了人流移动聚集规律,作为一种不定构型语义信息构建技术展现了人群聚集活动在城

基于城市语义图谱的轨迹时空语义模式提取方法.pdf
本发明属于轨迹计算技术领域,具体为一种基于城市语义图谱的轨迹时空语义模式提取方法。本发明包括:预处理:对轨迹数据进行位置与时间判定,对轨迹数据进行精简,只保留驻留点;语义判别:利用预处理阶段得到的驻留点进行语义信息判别;按照城市语义图谱中的聚类归属进行空间频次权重的加总,最高权重类别的语义标签定义为该驻留点语义;模式提取:将轨迹序列看成带有语义标签的时空驻留点序列,对海量的序列进行基于标签比较的高频序列检验和时空聚合分析,最后提取得到轨迹的时空语义模式。本发明基于城市语义图谱识别海量轨迹语义信息,克服了传

基于图谱数据的数据查询方法、图谱数据构建方法和装置.pdf
本公开提供了一种基于图谱数据的数据查询方法、图谱数据构建方法、装置、设备、介质和产品,涉及人工智能技术领域,具体为知识图谱、智能搜索等技术领域。基于图谱数据的数据查询方法包括:接收针对目标对象的待查询数据,其中,待查询数据包括目标对象标识;响应于图谱数据中存在与目标对象标识对应的目标对象节点,从图谱数据中查询目标地址节点和候选对象节点中的至少一个,其中,目标对象节点与目标地址节点基于目标对象状态数据相关联,候选对象节点与目标地址节点基于候选对象状态数据相关联;输出与目标地址节点对应的地址数据和与候选对象节
基于法律数据的知识图谱构建方法及系统.pdf
本发明提供了基于法律数据的知识图谱构建方法及系统,方法包括:构建法律词典步骤,提取法律短语步骤,预处理法律文本步骤,初步构建法律知识步骤,识别法律实体步骤,识别法律关系步骤,构造法律知识链步骤;系统包括法律基础词典构建模块、法律基础知识库构建模块、法律实体自动识别模块、法律关系自动识别模块、法律知识链自动生成模块。本发明实现了针对法律数据构建知识图谱,能够在多个法律案由,如离婚纠纷、合同纠纷和机动车交通事故责任纠纷等案由数据构建知识图谱,为法律行业的上层应用提供了走向智能化的数据。

基于车辆语义轨迹数据的停留点分析方法及其系统.pdf
本发明提供一种基于车辆语义轨迹数据的停留点分析方法及其系统,方法包括:获取车辆在预设时长内的轨迹数据;依据所述轨迹数据获取可疑停留点集合;对所述可疑停留点集合做聚类分析,得到至少一个的聚类点集合;基于语义分析每个聚类点集合,获取对应一预设关键词的聚类中心。本发明基于车辆预设历史时间内的轨迹数据进行分析处理,先获取可疑停留点集合,再据此做聚类分析,在聚类结果中根据实际业务需求做基于语义的聚类中心锁定,获取所有聚类中心作为最终停留点结果。能够为后续实际应用提供决策信息,满足现实业务需求。