
基于改进遗传算法的船舶航行实时最优航线规划方法.pdf

佳宁****么啦


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进遗传算法的船舶航行实时最优航线规划方法.pdf
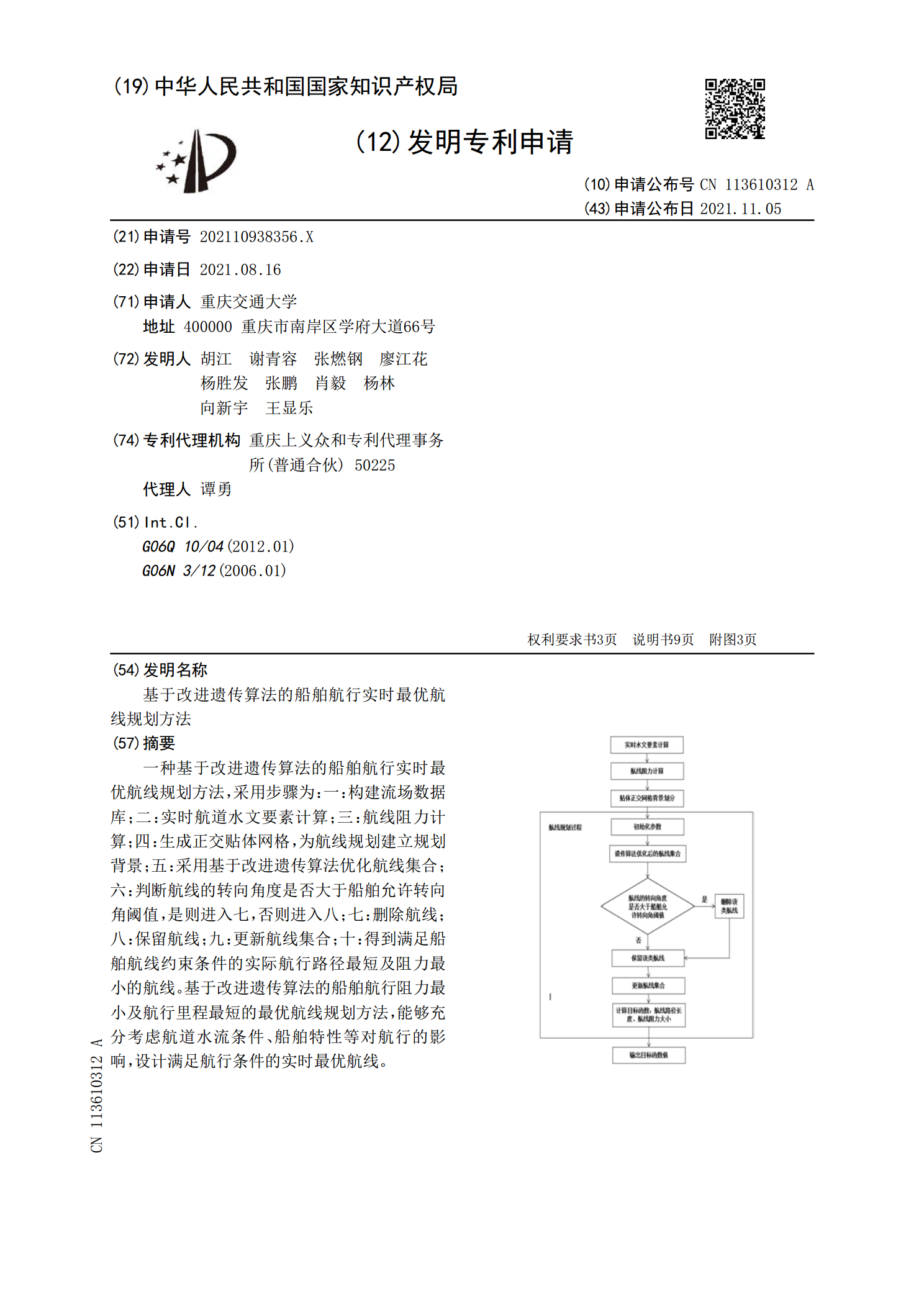
一种基于改进遗传算法的船舶航行实时最优航线规划方法,采用步骤为:一:构建流场数据库;二:实时航道水文要素计算;三:航线阻力计算;四:生成正交贴体网格,为航线规划建立规划背景;五:采用基于改进遗传算法优化航线集合;六:判断航线的转向角度是否大于船舶允许转向角阈值,是则进入七,否则进入八;七:删除航线;八:保留航线;九:更新航线集合;十:得到满足船舶航线约束条件的实际航行路径最短及阻力最小的航线。基于改进遗传算法的船舶航行阻力最小及航行里程最短的最优航线规划方法,能够充分考虑航道水流条件、船舶特性等对航行的影
一种基于船舶实时航线的气象数据裁减方法.pdf
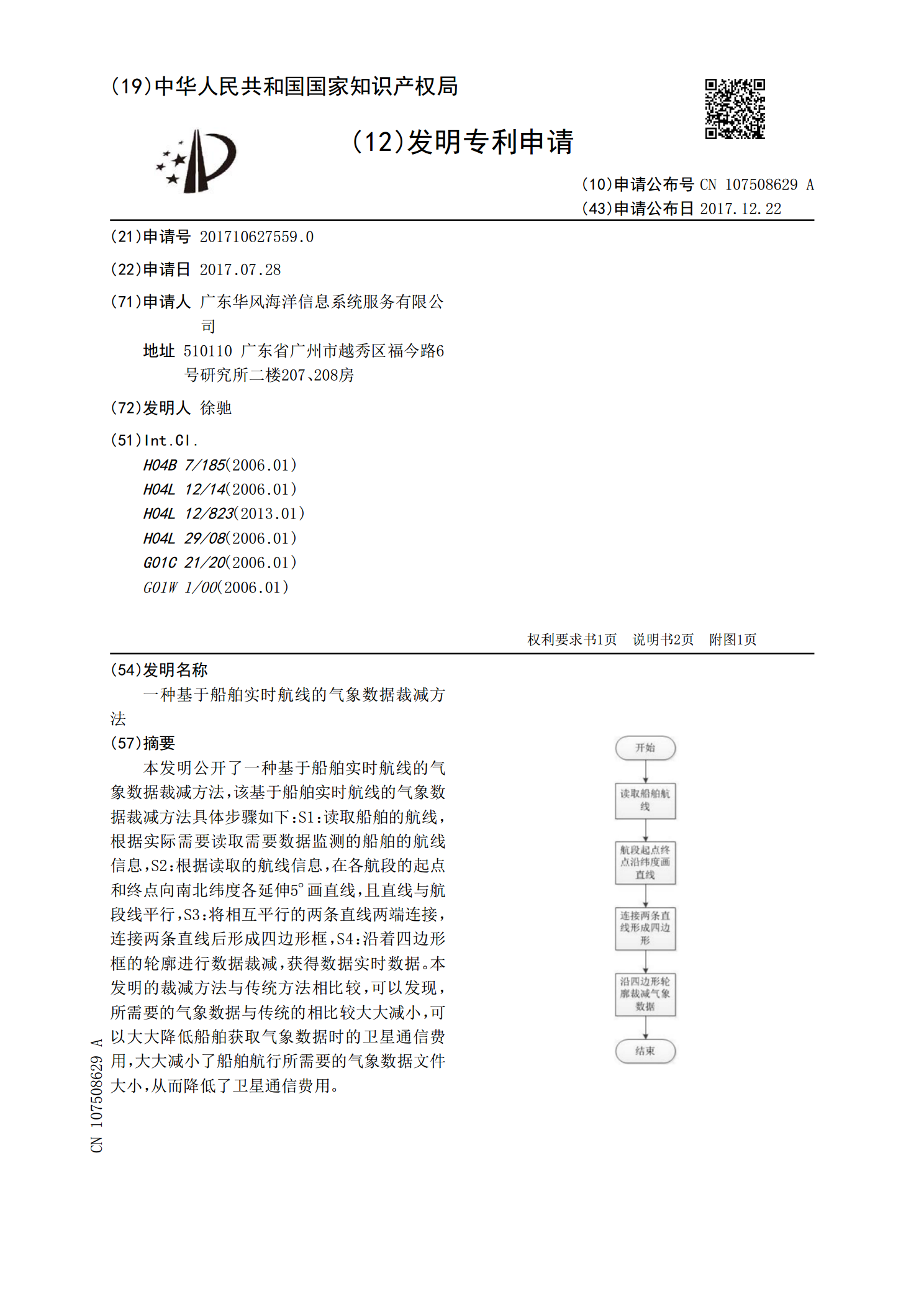
本发明公开了一种基于船舶实时航线的气象数据裁减方法,该基于船舶实时航线的气象数据裁减方法具体步骤如下:S1:读取船舶的航线,根据实际需要读取需要数据监测的船舶的航线信息,S2:根据读取的航线信息,在各航段的起点和终点向南北纬度各延伸5°画直线,且直线与航段线平行,S3:将相互平行的两条直线两端连接,连接两条直线后形成四边形框,S4:沿着四边形框的轮廓进行数据裁减,获得数据实时数据。本发明的裁减方法与传统方法相比较,可以发现,所需要的气象数据与传统的相比较大大减小,可以大大降低船舶获取气象数据时的卫星通信费

基于遗传算法的时间最短航线规划方法、燃油量最小航线规划方法、成本最低航线规划方法.pdf
本发明涉及一种基于遗传算法的时间最短航线规划方法、燃油量最小航线规划方法、成本最低航线规划方法,时间最短航线规划方法,包括:构建船舶航线目标函数模型和船舶航线约束条件;对航线的航路点信息、航路点之间各个航路段的航速进行实值编码,生成染色个体,形成初始航线航速群体;计算各染色个体的船舶航线目标函数值,并计算各染色个体的适应度;根据适应度对各染色个体进行选择、配对、交叉和变异运算,形成次遗传航线航速群体;计算次遗传航线航速群体的船舶航线目标函数值,并以次遗传航线航速群体为下一轮的初始航线航速群体,重复以上步骤
基于改进遗传算法的智能小车路径规划方法.pdf
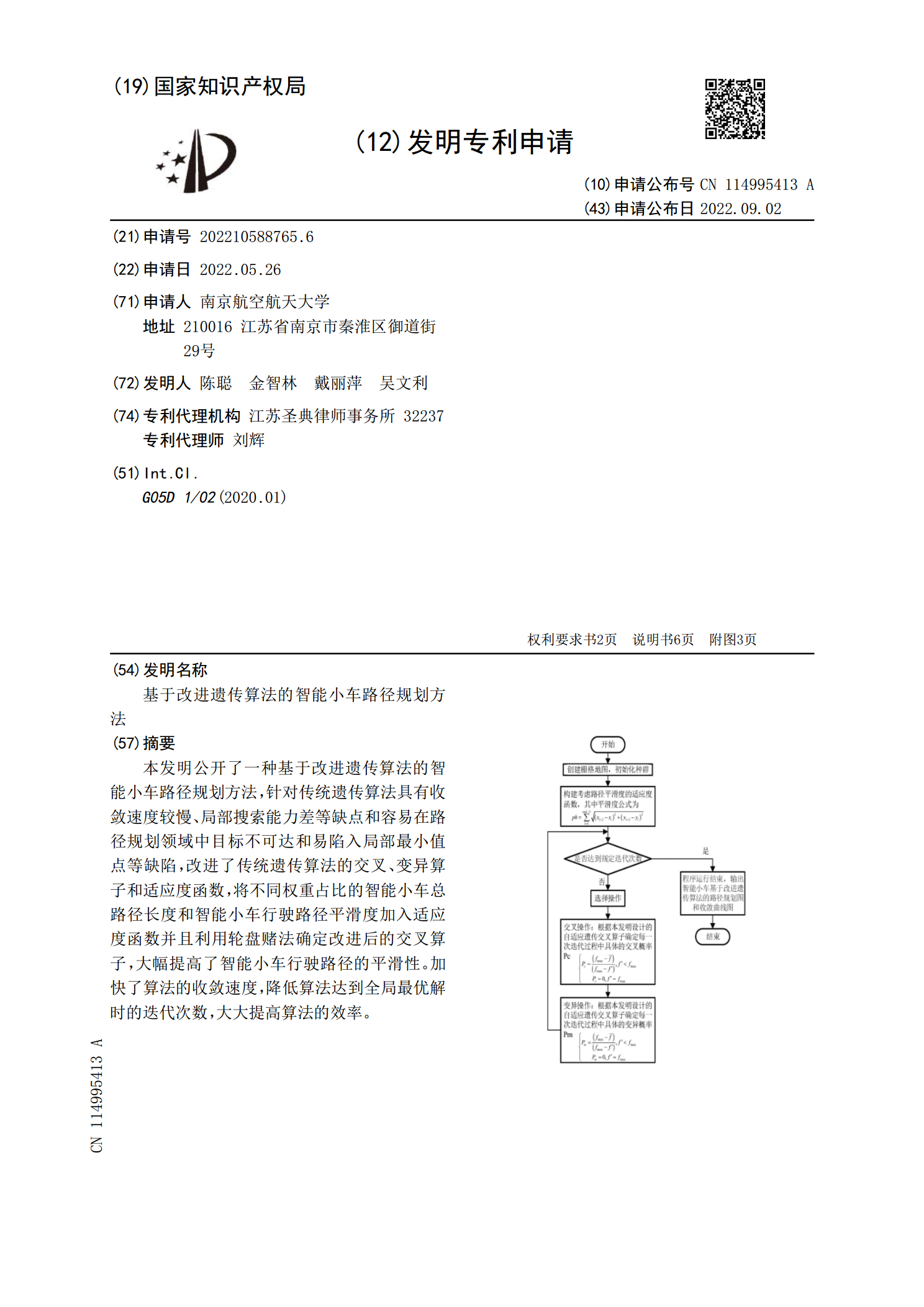
本发明公开了一种基于改进遗传算法的智能小车路径规划方法,针对传统遗传算法具有收敛速度较慢、局部搜索能力差等缺点和容易在路径规划领域中目标不可达和易陷入局部最小值点等缺陷,改进了传统遗传算法的交叉、变异算子和适应度函数,将不同权重占比的智能小车总路径长度和智能小车行驶路径平滑度加入适应度函数并且利用轮盘赌法确定改进后的交叉算子,大幅提高了智能小车行驶路径的平滑性。加快了算法的收敛速度,降低算法达到全局最优解时的迭代次数,大大提高算法的效率。

基于回环路网随机树的最优路径实时规划方法.pdf
一种基于回环路网随机树的最优路径实时规划方法,包括(1)回环路网预生成:①生成无环树;②在分支之间建立虚拟连接;③消除冗余和无效的虚拟连接;(2)实时优化迭代搜索:①建立起点和终点之间的不包含虚拟连接的路径;②遍历虚拟连接;③形成下一循环的迭代路径;④直到虚拟连接列表遍历完毕,此时的迭代路径即为算法优化搜索的结果,该路径通过松弛之后作为机器人运动的路径;(3)动态运行维护:①当障碍物发生变化时,修剪树分支,删除无效虚拟连接;②将修剪得到的多个子树进行重连接;③进行重生长过程,补充树节点和虚拟连接。本发明实